 2014-05-17
2014-05-17 4245
4245Скорости передвижения экскаваторов на гусеничном ходу зависят от их мощности и назначения и, как правило, не превышают 2,4 км/ч у карьерных лопат; у многоковшовых экскаваторов они не превышают 0,72 км/ч (12 м/мин) у моделей малой мощности и 0,48-0,18 км/ч (8-3 м/мин) у мощных.
Величины давлений на грунт определяются назначением машины и достигают максимальной величины, равной 0,42 МПа у карьерных лопат. Роторные и цепные экскаваторы имеют давления, не превышающие 0,12 МПа у вскрышных и 0,2 МПа у добычных машин.
Преодолеваемые гусеничными экскаваторами подъёмы, обычно, не превышают 7° у мощных машин и 12- 15°– у машин малой и средней мощности.
Система гусеничного ходового оборудования определяет число гусениц в схеме и их взаимное положение (рис. 4.10).
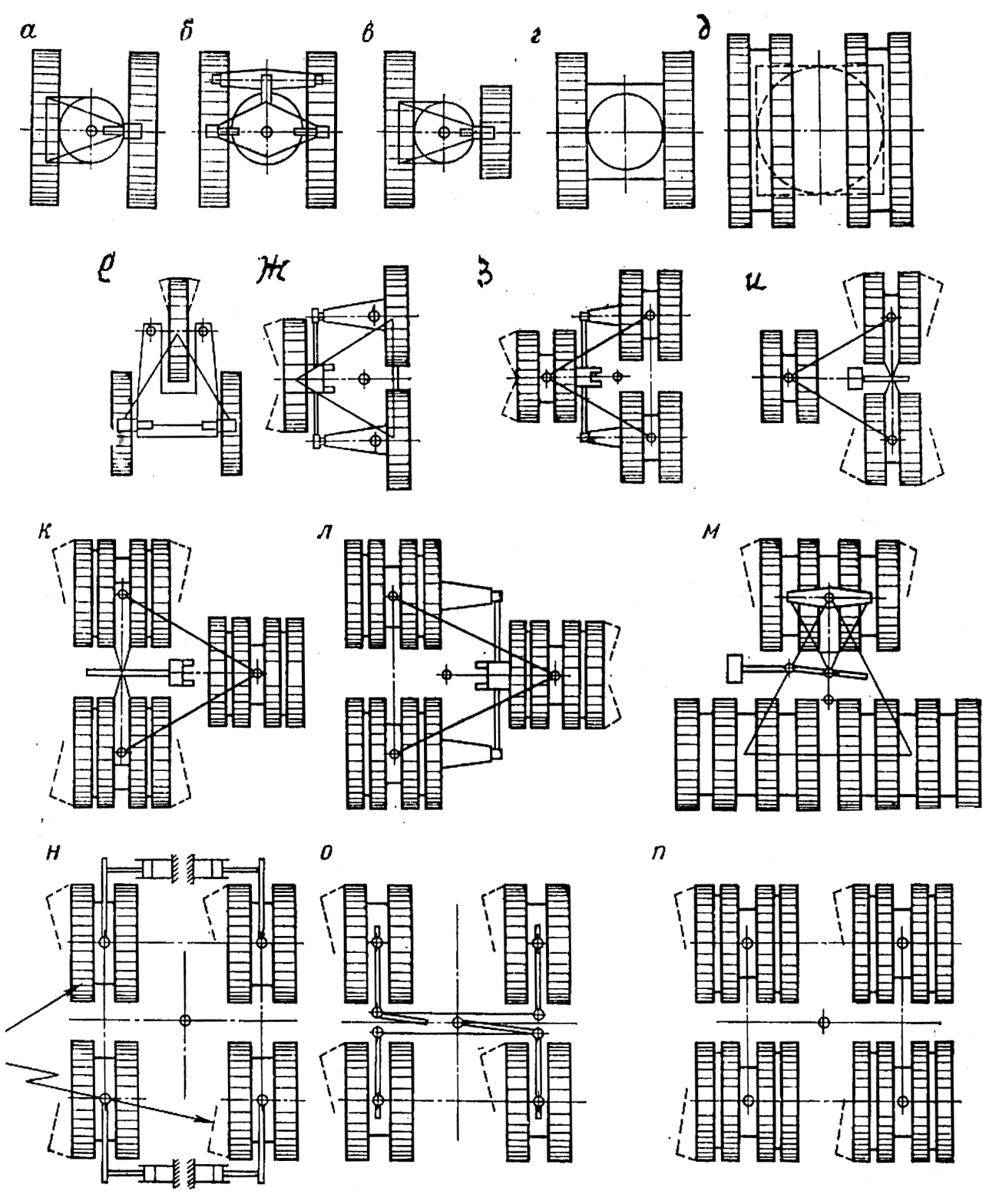
Рис. 4.10. Системы гусеничного ходового оборудования:
а – г – двухгусеничные; д – четырехтусеничная; трехгусеничная трехопорная с одной поворотной передней (е) и боковой (ж) тележками; шестигусеничная с одной (и) и двумя (з) спаренными поворотными тележками; двенадцатигусеничная с двумя (к) и одной (л, м) поворотными тележками; четырехопорная восьмигусеничная (н, о) и шестигусеничная (п) со всеми поворотными тележками
На одноковшовых экскаваторах применяются двух-, четырех- и восьмигусеничные системы (рис. 12.2, г, ж). Четырехгусеничное оборудование используется относительно редко (ЭКГ-12,5 массой 660 т и ЭРП-1250 массой – 1020 т). Существующие восьмигусеничные системы в состоянии перемещать массу до 12,6 тыс. т (вскрышная лопата 6360-М «Марион», США) при среднем давлении на грунт 0,385 МПа, ширине трака 3,62 м и длине тележки 13,7 м.
На многоковшовых экскаваторах применяют двух-, трех-, четырех-, шести-, двенадцати- и шестнадцатигусеничные системы. Две гусеницы имеют экскаваторы массой до 400 т, три – до 800 т, шесть – до 2000 т, 12 и 16 гусениц – большей массы. Существующие 12-гусеничные системы перемещают массу до 11,4 тыс. т при среднем давлении на грунт 0,169 МПа, ширине трака 3,7 м и длине тележки 15 м.
При трех (или кратных трем) гусеничных системах применяется трехточечная система опирания, обеспечивающая статически определимую передачу усилий на ходовые тележки. Такие системы выполняются симметричными относительно поперечной (рис. 4.10, ж, з, и, к, л) и продольной (рис. 4.10, е, н) осей машины. Две опоры в таких случаях располагаются со стороны рабочего оборудования, а одна – со стороны отвальной части. Сами опоры выполняются в виде гидродомкратов с шаровой пятой.
Движение экскаватора по кривой при двух (четырех) гусеницах достигается затормаживанием одной (двух) гусениц, сообщением правым и левым гусеницам различных скоростей. При четырехточечной системе опирания хода используют разворот всех гусениц с помощью рычагов. Последнее чаще осуществляется гидроцилиндрами, закрепленными одной стороной на базе ходовой рамы, а другой – на рычаге рамы ходовой тележки.
Поворот гусениц возможен либо при повороте передней гусеницы (рис. 4.10, е, н), либо одной боковой (рис. 4.10, ж, и, л), либо двух вслед идущих групп гусениц (рис. 4.10, з, к). В двух последних случаях обеспечивается наибольшая маневренность, так как радиус поворота экскаватора получается наименьшим при том же угле поворота гусениц.
У восьми – и шестнадцатигусеничных систем поворачиваются все четыре пары. По схемам, показанным на рис. 4.10, н, о, п, поворот тележек переднего и заднего рядов осуществляется на разные углы по двум окружностям с центром в одной точке. По схеме, приведенной на рис. 4.10, о, разворот возможен поворотом всех гусениц в одну сторону на одинаковый угол.
При равных максимальных углах поворота управляемых гусениц, наилучшей маневренностью обладают трехопорные машины с симметричным расположением гусениц относительно поперечной оси при повороте в сторону неуправляемой гусеницы (рис. 4.10, з, к).
Поворот в сторону управляемых гусениц для этих машин требует значительно большего угла разворота гусениц. Неприводная гусеница, движущаяся по внутренней кривой, улучшает маневренность машины, в то же время, обеспечивая минимальные поперечные силы на гусеницах.
Под типом гусениц понимают их конструктивное оформление, характеризующее гусеницы в эксплуатационном и производственном отношениях.
По способу передачи давления на грунт различают многоопорные и малоопорные гусеницы.
Гусеницы называют многоопорными, если отношение числа опорных звеньев (траков), лежащих на земле, к числу опирающихся на них катков, ведущих и направляющих колес меньше двух (рис. 4.11, а). В этом случае, звенья между опорными катками почти не прогибаются и обеспечивают равномерное давление на грунт как под катками, так и между ними. У малоопорной гусеницы это отношение больше двух: звенья легко прогибаются между катками, сгибаясь в шарнирах и образуя волнистую линию. При этом создается значительная разница между давлениями под катками и между ними (рис. 4.11). Поэтому многоопорная гусеница применяется на экскаваторах, перемещающихся по породам со слабой несущей способностью, а малоопорная – по прочным.
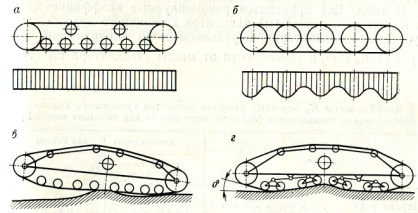 |
| Рис. 4.11. Типы гусениц: а, в, г – многоопорные; б – малоопорная; а, б, в – жесткие; г – мягкая |
На слабых породах малоопорная гусеница в большей степени погружается в почву, чем многоопорная, однако, лучше переносит сосредоточенные нагрузки, возникающие при работе экскаватора на скальных породах, так как имеет более прочные большие катки. Малоопорные гусеницы обычно снабжаются четырьмя-пятью катками большого диаметра, многоопорные – шестью-восемью катками небольшого диаметра.
Показанные на схемах гусеницы (см. рис. 4.11, а-в) имеют жесткое крепление опорных катков к ходовой раме, в силу чего, они плохо приспособляются к неровностям почвы. Для устранения этого недостатка применяются устройства, дающие гусеничной цепи деформироваться как в вертикальном, так и в поперечном направлении. Так, в первом случае, опорные катки либо разносят на величину двух или более звеньев, либо объединяют в балансирные тележки (рис. 4.11, г). В последнем случае – балансирным тележкам дают возможность самоустановки в поперечном направлении, или опорные поверхности катков закругляют, что позволяет звену гусеничной цепи самоустанавливаться на неровностях почвы.
Для работы на рыхлых (слабых) породах оси направляющих и ведущих колес поднимают над землей так, чтобы нижняя ветвь гусеничной цепи, идущая от крайнего катка к колесу, была наклонена к горизонту под углом δ = 10÷20º (рис. 4.11, в, г).
В табл. 12.1 приводятся рекомендуемые коэффициенты Кх основных размеров i (м) элементов гусеничного ходового оборудования экскаваторов, определяемых по эмпирической формуле i = Кх 3√ m ˉˉˉˉ э в зависимости от массы экскаватора mэ (т).
Таблица 4.1
Коэффициенты Кх основных размеров элементов гусеничного ходового оборудования экскаваторов (большие величины – для меньших моделей)
| Размеры | Коэффициент Кх для систем | |
| двух – и трехгусеничных | 12 – и 16-гусеничных | |
| Ширина хода | 0,9 – 0,8 | 1,2 – 1,35 |
| Длина гусеницы | 1,05 – 1,2 | 0,6 – 0,8 |
| Ширина эвена | 0,17 – 0,19 | 0,14 – 0,11 |
| Шаг эвена | 0,06 – 0,07 | 0,07 – 0,05 |
| Диаметры: ведущего/направляющего колеса | 0,17 – 0,2 | 0,14 – 0,17 |
| опорного катка | 0,08 – 0,09 | 0,06 – 0,05 |

