 2015-02-24
2015-02-24 746
746Кинематическая цепь – подвижная система связанных между собой звеньев и кинематических пар.
С этой точки зрения механизм можно представить как кинематическую цепь, в которой упорядоченно движение звеньев и в которой присутствует неподвижное звено – стойка. Различают:
1) Открытые кинематические цепи – если существует, хотя бы одно звено, входящее в одну кинематическую пару.
2) Замкнутые – каждое звено ходит не менее чем в две кинематические пары.
3) Простые, – в которые звенья входят не более чем в две кинематические пары.
4) Сложные – если хотя бы одно звено входит в более чем в две кинематические пары.
5) Плоские – звенья перемещаются в параллельных плоскостях (участвуют в плоскопараллельном движении).
6) Пространственные, – в которых звенья совершают пространственные движения.
Существуют общие закономерности в структуре различных механизмов, связывающие число степеней свободы W (подвижность) с числом звеньев n, числом и видом его кинематических пар. Эти закономерности выражаются структурными формулами.
Если механизм состоит из n звеньев, то максимальное число степеней свободы, которой может обладать такой механизм в пространственном случае равно W=6n. Если в механизме присутствуют  кинематических пар класса j, каждая из которых отнимает j степеней свободы, то число степеней свободы механизма будет:
кинематических пар класса j, каждая из которых отнимает j степеней свободы, то число степеней свободы механизма будет:
 - формула Сомова – Малышева. (2.2)
- формула Сомова – Малышева. (2.2)
Эта формула определяет число независимых обобщенных координат определяющих положение звеньев механизма в пространстве. Для плоских механизмов, в которых присутствуют только низшие кинематические пары пятого класса и высшие пары четвертого класса, а максимальная степень подвижности свободного звена =3,эта формула может быть приведена к виду:
 - формула Чебышева. (2.3)
- формула Чебышева. (2.3)
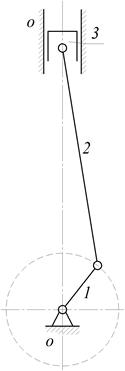
Так для плоского кривошипно-ползунного механизма (Рис 2.4), число звеньев n=3, число кинематических пар низшего класса =4 (0-1,1-2,2-3,3-0), подвижность механизма будет:
Рис. 2.4
W=3*3-2*4=1.








