 2015-02-24
2015-02-24 3380
3380Для заданного движения механизма количество звеньев, их вид и число кинематических пар должно быть вполне определенно. Однако в реальных конструкциях для определенности движения возникает необходимость введения дополнительных звеньев образующих дополнительные кинематические пары с остальными звеньями. Если при этом расчетная подвижность механизма (определяемая по формулам (2.2) и (2.3)) уменьшается, то такие связи называются избыточными, а если увеличивается то пассивные. Так, например, рассмотрим механизм (Рис 2.5а). Его подвижность равна W=1. Принимая в качестве ведущего звена кривошип-1, можно видеть, что в критической точке (Рис 2.5б), кривошип 3 имеет возможность изменить направление вращения и установиться в положение, показанное на (Рис 2.5в), В этом положении произойдет заклинивание механизма. Для устранения этого вводят дополнительное звено – шатун 4. При этом фактическая подвижность механизма не изменяется. Расчетная подвижность, как видно из Рис 2.5г, становится равной нулю, т.е. уменьшается по отношению к фактической. Следовательно, звено 4 вместе с кинематическими парами 1-4 и 3-4, введенных из конструктивных соображений, образуют избыточную связь.
В качестве примера введения пассивной связи рассмотрим кулачковый механизм (Рис 2.6а). В этом механизме фактическая подвижность равна -1.
Расчетное значение подвижности равно двум. Очевидно, это произошло из-за введения в механизм ролика 2, образующего с кулачком 1 высшую кинематическую пару и введенного в механизм из конструктивных соображений (для уменьшения трения). Это звено образует дополнительную пассивную связь. При замене звеньев 2 и3 одним, как показано на Рис 2.6б, расчетная подвижность механизма становится равной фактической =1.
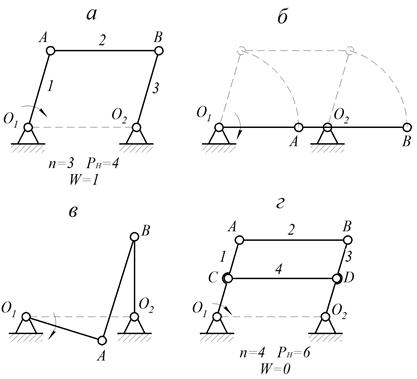
Рис. 2.5
Структурные формулы (2.2) и (2.3), при наличии избыточных –q связей преобразуются к виду:
 (2.2а)
(2.2а)
и
 (2.3а)
(2.3а)
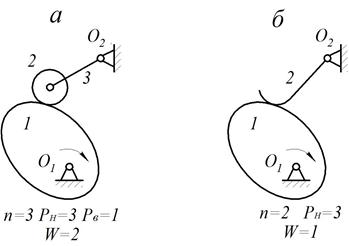
Рис. 2.6
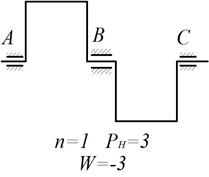
Рис. 2.7
Если избыточных связей нет (q=0), то сборка механизма происходит без деформации звеньев самоустанавливающиеся механизмы). При q>0 звенья при сборке могут быть деформированы. Что вызывает дополнительные нагрузки на кинематические пары и звенья. При недостаточной точности изготовления звеньев и кинематических пар трение в последних может быть значительным и может привести к заклиниванию механизма. Однако в ряде случаев для обеспечения жесткости и прочности механизма приходиться вводить избыточные связи. Так, например, коленчатый вал двигателя внутреннего сгорания для обеспечения жесткости устанавливается в дополнительных опорах В и С (Рис 2.7), что приводит к расчетной степени подвижности =-3. При структурном анализе механизма для определения степени его подвижности необходимо убрать избыточные и пассивные связи.
В результате структурного анализа механизма определяется его степень подвижности, а также наличие пассивных и избыточных связей.
Степень подвижности, в свою очередь, определяет число ведущих звеньев. Кроме того степень подвижности механизма определяет его степень статической неопределенности. Так при W=0 механизм превращается в неподвижную статически определимую механическую систему (например – ферму). Значение W<0 соответствует жесткой статически неопределимой системе.








