 2015-04-12
2015-04-12 408
408СЛЕДЯЩИЕ ГИДРОЕХАНИЧЕСКИЕ ПРИВОДЫ С ДРОССЕЛЬНЫМ РЕГУЛИРОВАНИЕМ
В гидроприводах с дроссельным регулированием используют исполнительные гидродвигатели с линейным перемещением выходного звена, гидродвигатели с неполноповоротным перемещением выходного звена и гидродвигатели с неограниченным вращательным движением выходного звена. Наиболее широкое распространение получили гидроприводы, имеющие гидродвигатели первого из перечисленных выше типов, поэтому далее будут рассмотрены вопросы динамики именно этих гидроприводов, однако излагаемую методику расчетов можно применить и для приводов с другими гидродвигателями. В динамике систем основными вопросами являются устойчивость и качество процессов регулирования, их решение будет дано для следящих гидро- и пневмомеханических приводов, управление распределитель-ными устройствами которых осуществляется посредством рычажных механизмов.
Достоинствами таких приводов являются высокое быстродействие и удельная мощность, компактность, долговечность и надежность. Недостатки – трудность в устранении утечек в элементах, изменение характеристик в зависимости от температуры и нагрузки, низкий КПД, нагрев жидкости.
На рис. 1 дана схема следящего гидромеханического привода с дроссельным регулированием. Механизм управления гидроприводом состоит из рычагов АОВ и СОD. При смещении точки Aрычага AОВ в направлении, показанном на схеме стрелкой, золотник смещается влево в положение В', соединяя левую полость гидроцилиндра с напорной линией, а правую полость гидроцилиндра - со сливной линией. Под действием возникшего в полостях перепада давления поршень гидроцилиндра перемещается вправо. Если шток поршня гидроцилиндра перемещается вправо, то точка Cрычага CODтакже перемещается вправо. Поршень гидроцилиндра будет перемещаться до тех пор, пока точка 0 не займет положение 0', которому при фиксированном положении А' точки А соответствует нейтральное положение золотника. Таким образом, перемещением точки А рычага АОВ осуществляется входное воздействие на данный следящий привод, а рычагом СОD обеспечивается отрицательная обратная связь от выходного звена (штока гидроцилиндра) к золотнику. Коэффициенты передачи механизма управления зависят от отношений плеч рычагов AОВ и СОD.
Любой привод при работе должен преодолевать те нагрузки, которые действуют на его выходное звено со стороны управляемого приводом объекта. При расчетах приводов следует учитывать инерционную и позиционную нагрузки, а также силы трения. Инерционная нагрузка создается массами перемещаемых с ускорением частей управляемого объекта. Например, если привод используется в системе управления самолетом, то инерционная нагрузка будет обусловлена массой рулей или элеронов. Массы перемещаемых приводом частей при исследовании его динамики обычно заменяют приведенной к направлению движения выходного звена массой. В нашем случае выходным звеном является шток поршня гидроцилиндра, и приведенная к направлению его движения масса обозначена через т. Связь выходного звена привода с управляемым объектом обладает упругостью. На схеме эта упругая связь условно показана в виде пружины жесткостью  .
.
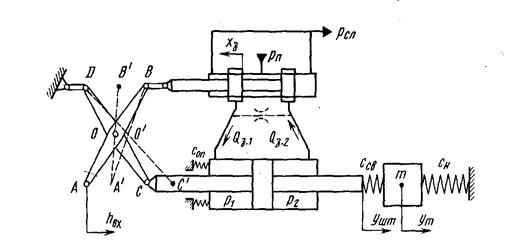
Рис. 1. Схема гидромеханического привода с дроссельным регулированием
Позиционная нагрузка характеризуется зависимостью преодолеваемых приводом усилий от перемещения выходного звена. При управлении рулями самолета позиционная нагрузка создается аэродинамическими моментами. Часто позиционная нагрузка описывается близкой к линейной зависимостью усилия (силы или момента) от положения выходного звена. В рассматриваемом гидроприводе действие позиционной нагрузки заменяет пружина жесткостью  , которая при движении поршня гидроцилиндра вправо от среднего положения сжимается, а при движении влево от этого положения растягивается. При среднем положение поршня усилие этой пружины равно нулю.
, которая при движении поршня гидроцилиндра вправо от среднего положения сжимается, а при движении влево от этого положения растягивается. При среднем положение поршня усилие этой пружины равно нулю.
Силы трения, нагружающие выходное звено привода, возникают при движении частей управляемого объекта в окружающей среде (например, при движении руля самолета в воздухе), а также вследствие трения в элементах соединения выходного звена с управляемым объектом и вследствие трения в исполнительном гидродвигателе. Зависимости сил трения от скорости элемента, на который они действуют, могут быть достаточно сложными.
Если корректно учитывать все параметры системы, то получится сложная модель, на которой трудно выявить основные особенности динамики рассматриваемого привода. Поэтому сначала в общем виде построим и проанализируем линейную модель привода, а затем рассмотрим модель, наиболее полно описывающую следящий гидропривод с дроссельным регулированием.








