 2015-04-17
2015-04-17 9895
9895Радиосистемой ближней навигации (РСБН) называется совокупность наземных и бортовых радиоустройств, находящихся друг от друга в пределах прямой видимости и предназначенная на определения местоположения летательного аппарата на этапах снижения и посадки.
Определить местоположение летательного аппарата с помощью РСБН означает измерить на борту данного аппарата его координаты (дальность  и азимут
и азимут  ) относительно наземного радиоустройства (радиомаяка РМ) – рис. 4.3. При этом высота полета
) относительно наземного радиоустройства (радиомаяка РМ) – рис. 4.3. При этом высота полета  определяется с помощью бортового высотомера. Максимальной для РСБН обычно считается дальность , равная 400 км, при высоте полета , составляющей 10 км.
определяется с помощью бортового высотомера. Максимальной для РСБН обычно считается дальность , равная 400 км, при высоте полета , составляющей 10 км.
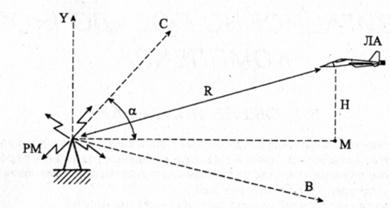 |
Рис. 4.3. Взаимное расположение летательного аппарата ЛА (несущего бортовую аппаратуру РСБН) и радиомаяка РМ (с наземной аппаратурой РСБН) в местной сферической (неподвижной относительно земной поверхности) системе координат  : :  – направление местной вертикали в точке расположения РМ; – направление местной вертикали в точке расположения РМ;  – северное направление меридиана, проходящего через точку расположения РМ; – северное направление меридиана, проходящего через точку расположения РМ;  – направление из точки расположения РМ на восток; – высота полета ЛА; – дальность ЛА относительно РМ; – направление из точки расположения РМ на восток; – высота полета ЛА; – дальность ЛА относительно РМ;  – точка проекции ЛА на земную поверхность; – азимут ЛА в системе координат – точка проекции ЛА на земную поверхность; – азимут ЛА в системе координат  |
Основу РСБН составляет сеть радиомаяков РМ, которые размещены на земной поверхности в радионавигационных точках и координаты которых известны на борту. Использование информации о наземных координатах РМ, в сочетании с измеренными бортовой аппаратурой РСБН величинами и , позволяет экипажу летательного аппарата определить свое географическое местонахождение.
Отметим, что РСБН работают в следующих диапазонах электромагнитных волн:
– при импульсном излучении – в дециметровом диапазоне (длина волны около 30 см).
– при непрерывном излучении – в метровом диапазоне (длина волны около 3 м).
Поскольку РСБН измеряет дальность и азимут , она относится к классу дальномерно-угломерных систем. При этом РСБН состоит из двух независимых каналов – дальности и азимута. Это означает, что самолетовождение может быть осуществлено либо автономно по каждому из каналов, либо по их совокупным данным.
На рис. 4.4 представлены все три возможные ситуации.
Рассмотрим функционирование каждого из каналов РСБН.
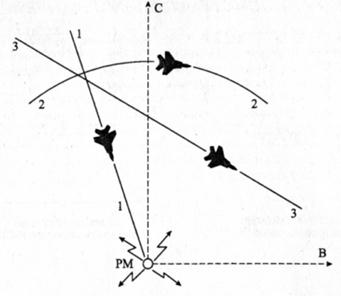 |
| Рис. 4.4. Траектория (линия заданного пути) самолетов, прокладываемые с помощью различных каналов РСБН |
Здесь: 1-1 – с помощью угломерного канала (траектория – прямая линия, проходящая через радиомаяк РМ); 2-2 – с помощью дальномерного канала (траектория – окружность с центром в точке расположения радиомаяка РМ); 3-3 – с помощью совместного действия дальномерного и угломерного каналов; – направлении на север; – направление на восток.
Дальномерный канал РСБН
Принцип измерения дальности с помощью дальномерного канала РСБН основан на импульсном (временном) методе дальнометрии и заключается в следующем (рис. 4.5).
Генератор 1, расположенный в бортовой аппаратуре дальномерного канала РСБН, вырабатывает импульс запроса ИЗ-1, который подается на бортовое радиопередающее устройство 2. В данном радиопередающем устройстве указанный импульс запроса заполняется радиочастотой  , после чего излучается в пространство.
, после чего излучается в пространство.
Наземное радиоприемное устройство 3, находящееся на радиомаяке, т.е. входящее в состав наземной аппаратуры дальномерного канала РСБН, принимает импульс запроса (этот импульс на выходе радиоприемного устройства обозначен как ИЗ-2) и подает его на формирователь импульса ответа 4. Импульс ответа ИО-1 вырабатывается на выходе формирователя по истечении заранее заданного временного интервала  с момента поступления на формирователь импульса запроса ИЗ-2.
с момента поступления на формирователь импульса запроса ИЗ-2.
Сформированный импульс ответа ИО-1 далее в наземном радиопередающем устройстве 5 переносится на радиочастоту заполнения  , после чего излучается в пространство.
, после чего излучается в пространство.
Отметим, что использование частоты (другой в отличие от частоты , формируемой бортовой аппаратурой) обусловлено требованием к радиомаяку не принимать излученные им же радиосигналы, которые, отразившись от местных объектов (строения вблизи радиомаяка, находящиеся невдалеке самолеты, линии электропередачи и т.п.), поступают на данный радиомаяк.
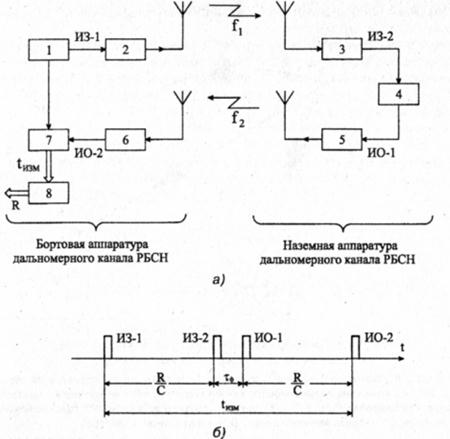 |
| Рис. 4.5. Структурная схема дальномерного канала РСБН (а) и временная диаграмма за один измерительный цикл (б): |
Здесь: 1 – генератор импульса запроса; 2 – бортовое радиопередающее устройство; 3 – наземное радиоприемное устройство; 4 – формирователь импульса ответа; 5 – наземное радиопередающее устройство; 6 – бортовое радиоприемное устройство; 7 – измеритель времени интервала  ; 8 – вычислитель дальности ; ИЗ – импульс запроса; ИО – импульс ответа.
; 8 – вычислитель дальности ; ИЗ – импульс запроса; ИО – импульс ответа.
Данный радиоимпульс, поступивший на вход бортового радиоприемного устройства 6, далее подается (как импульс ответа ИО-2) на измеритель временного интервала 7, который вычисляется по формуле:
 , (4.1)
, (4.1)
где – расстояние между самолетом и радиомаяком; – скорость распространения электромагнитной энергии радиоволн ( м/с); – величина временной задержки (заранее известная) в формирователе 4.
м/с); – величина временной задержки (заранее известная) в формирователе 4.
Наконец, значение , выраженное в цифровом коде, вводится в числитель дальности 8, функционирующий в соответствии с соотношением:
 , (4.2)
, (4.2)
полученным из выражения (6.2.1), в результате чего данный вычислитель вырабатывает цифровое значение величины дальности .
Таков общий принцип измерения дальности, реализуемый в дальномерном канале РСБН.
Рассмотрим работу измерителя дальности, входящего в состав дальномерного канала РСБН, более подробно.
Структурная схема этого измерителя и эпюры, поясняющие его функционирование, представлены на рис. 4.6. При этом, поскольку данный измеритель входит в состав структурной схемы, изображенной на рис. 4.5,а, то нумерация узлов на рис. 4.6,а не является самостоятельной, а продолжает нумерацию узлов, показанных на рис. 4.5,а.
Работа измерителя дальности РСБН заключается в следующем.
Каждый цикл функционирования начинается с того, что генератора тактовых импульсов 9 вырабатывает достаточно протяженный во времени тактовый импульс (его длительность равна  ), который представлен на диаграмме 1. Этот импульс открывает электронный ключ 10 на интервал , в результате чего счетные импульсы (следующие с малым периодом повторения
), который представлен на диаграмме 1. Этот импульс открывает электронный ключ 10 на интервал , в результате чего счетные импульсы (следующие с малым периодом повторения  ), вырабатываемые генератором счетных импульсов 11, начинают подаваться на счетчик 12. В тот же самый момент счетчик 12, включаясь в режим подсчета счетных импульсов, одновременно формирует импульс запуска ИЗ-13 (см. диаграмму 2), который далее поступает на генератор импульса запроса ИЗ-1 1. Таким образом, результатом начала цикла функционирования является излучение запросного радиоимпульса.
), вырабатываемые генератором счетных импульсов 11, начинают подаваться на счетчик 12. В тот же самый момент счетчик 12, включаясь в режим подсчета счетных импульсов, одновременно формирует импульс запуска ИЗ-13 (см. диаграмму 2), который далее поступает на генератор импульса запроса ИЗ-1 1. Таким образом, результатом начала цикла функционирования является излучение запросного радиоимпульса.
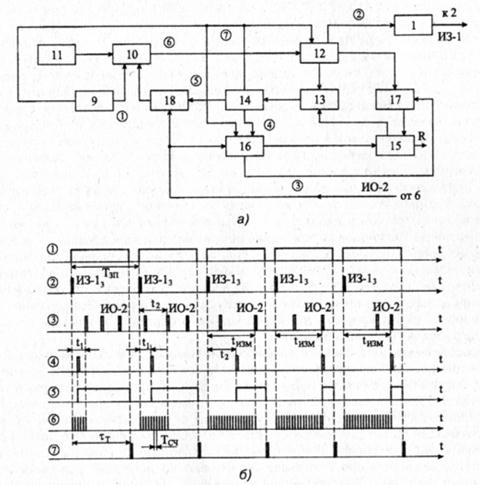 |
| Рис. 4.6. Структурная схема измерителя дальности (входящего в состав дальномерного канала РСБН) (а) и временные диаграммы в отдельных точках этого измерителя (б) |
Здесь: 9 – генератор тактовых импульсов; 10 – электронный ключ; 11 – генератор счета импульс; 12 – счетчик; 13 – схема сравнения кодов; 14 – генератор селектирующих импульсов; 15 – устройство формирования кода дальности; 16 – первое устройство совпадения; 17 – устройства передачи кода дальности; 18 – второе устройство совпадения.
Следует отметить, что за время одного цикла формирования  на вход бортовой аппаратуры дальномерного канала РСБН могут поступить не один, а несколько ответных радиоимпульсов, соответствующих одному и тому же запросному радиоимпульсу. При этом запаздывание первого из них, характеризующееся соотношениями (4.1) и (4.2), будет соответствовать кратчайшему (истинному) расстоянию между самолетом и радиомаяком, а запаздывания последующих будут обусловлены переотражениями от местных предметов. Поэтому структура бортового измерителя дальности, входящего в дальномерный канал РСБН спроектирована так, чтобы выполнять оценку дальности по первому принятому радиоимпульсу. Именно этот критерий селекции импульса ответа ИО-2 реализуется как в режиме поиска (когда дальномерный канал РСБН самолета, влетающего в зону действия наземного радиомаяка, только начинает устанавливать требуемый контакт с радиомаяком), так и в режиме слежения (т.е. при поддержании указанного контакта в процессе пребывания самолета в зоне действия наземного радиомаяка).
на вход бортовой аппаратуры дальномерного канала РСБН могут поступить не один, а несколько ответных радиоимпульсов, соответствующих одному и тому же запросному радиоимпульсу. При этом запаздывание первого из них, характеризующееся соотношениями (4.1) и (4.2), будет соответствовать кратчайшему (истинному) расстоянию между самолетом и радиомаяком, а запаздывания последующих будут обусловлены переотражениями от местных предметов. Поэтому структура бортового измерителя дальности, входящего в дальномерный канал РСБН спроектирована так, чтобы выполнять оценку дальности по первому принятому радиоимпульсу. Именно этот критерий селекции импульса ответа ИО-2 реализуется как в режиме поиска (когда дальномерный канал РСБН самолета, влетающего в зону действия наземного радиомаяка, только начинает устанавливать требуемый контакт с радиомаяком), так и в режиме слежения (т.е. при поддержании указанного контакта в процессе пребывания самолета в зоне действия наземного радиомаяка).
Возможны и более сложные случаи – когда, например, в зоне действия данного радиомаяка одновременно находятся несколько самолетов (в этом случае на вход бортовой аппаратуры помимо «своего» ответного радиоимпульса поступают также и ответные радиоимпульсы, предназначенные для других самолетов), либо возникает напряженная помеховая обстановка (которая приводит к возникновению дополнительных радиоимпульсов, мешающих измерению дальности). Однако поскольку отмеченные факторы имеют случайный, а иногда и достаточно быстротечный характер, то в большинстве практических случаев структура измерителей дальности не ориентируется на ситуации такого рода. Это означает, что критерий селекции импульса ИО-2, заложенный в бортовой аппаратуре дальномерного канала РСБН, не изменяется.
Продолжим рассмотрение функционирования измерителя дальности (рис. 4.6).
На диаграмме 3 представлены различные комбинации импульсов, которые могут поступать на данный измеритель с выхода бортового радиоприемного устройства 6. Для реализации критерия селекции первого пришедшего импульса в рассматриваемом измерителе предусмотрены схема сравнения кодов 13, вырабатывающая сигнал для генератора селектирующих импульсов 14 в момент равенства кодов в счетчике 12 и устройстве формирования кода дальности 15; генератор селектирующих импульсов 14, который вырабатывает два селектирующих импульса: узкий фиксированной дальности – диагр. 4 и широкий переменной дальности – диагр. 5; первое устройство совпадения 16, регистрирующее факт попадания импульса, поступившего от бортового радиоприемного устройства 6 в пределы узкого селектирующего импульса (данная операция выполняется на интервале существования тактового импульса длительности , т.е. до появления сигнала, представленного на диаграмме 7); устройство передачи кода дальности 17, пересылающее код дальности из счетчика 12 в устройство формирования кода дальности по сигналу 15, выработанному первым устройством совпадения 16; и второго устройства совпадения 18, пропускающее на электронный ключ 10 первый из поступивших от бортового радиоприемного устройства импульсов 6 (возникших не ранее передних фронтов узкого и широкого селектирующих импульсов).
Принцип функционирования указанных узлов согласно критерию селекции первого пришедшего импульса заключается в следующем.
Интервал времени  (диаграмма 3) между передним фронтом тактового импульса (диаграмма 1) и первым импульсом, пришедшим (диаграмма 3) от бортового радиоприемного устройства 6 и совпавшим при этом с широким селектирующим импульсом (диаграмма 5), выраженный соответствующим количеством счетных импульсов (диаграмма 6) в данном цикле работы измерителя дальности РСБН, переносится в неизменном виде на следующий цикл работы данного измерителя, воплощаясь как интервал между передними фронтами следующих тактового и селектирующего импульсов. Аналогично – интервал
(диаграмма 3) между передним фронтом тактового импульса (диаграмма 1) и первым импульсом, пришедшим (диаграмма 3) от бортового радиоприемного устройства 6 и совпавшим при этом с широким селектирующим импульсом (диаграмма 5), выраженный соответствующим количеством счетных импульсов (диаграмма 6) в данном цикле работы измерителя дальности РСБН, переносится в неизменном виде на следующий цикл работы данного измерителя, воплощаясь как интервал между передними фронтами следующих тактового и селектирующего импульсов. Аналогично – интервал  , измеренный в следующем цикле, переносится, соответственно, на положение селектирующих импульсов в еще более дальнем (непосредственно примыкающем к следующему) цикле. Наконец, рано или поздно, импульс ИО-2 ответа начинает совпадать во времени с узким селекторным импульсом.
, измеренный в следующем цикле, переносится, соответственно, на положение селектирующих импульсов в еще более дальнем (непосредственно примыкающем к следующему) цикле. Наконец, рано или поздно, импульс ИО-2 ответа начинает совпадать во времени с узким селекторным импульсом.
Данное совпадение означает, что время запаздывания импульса ответа Ио-2 относительно импульса запроса ИЗ-1 (или, что то же ИЗ-13) равняется величине , определяемой согласно соотношению (6.2.1).
Факты этих совпадений (в каждом цикле) фиксируются первым устройством совпадения 16 и подсчитываются (за несколько циклов) в устройстве формирования кода дальности 15. Когда, указанных совпадений наберется обусловленное количество (например, 3 совпадения за 4 цикла работы), измеритель дальности перейдет из режима поиска ИО-2 в режим слежения за ИО-2. Режим слежения за ИО-2 осуществляется с помощью тех же узлов измерителя дальности.
Одной из особенностей режима слежения является возможное попадание импульсов ответа ИО-2. Данное попадание обычно обусловлено чрезмерно резкими воздушными эволюциями самолета, заходящего на посадку. В таком случае совпадения узкого селектирующего с ИО-2, разумеется, не происходит, однако. Значение дальности на выходе устройства формирования кода дальности 15 остается неизменным в течение заранее рассчитанного интервала времени (обычно 8…12 с). Если по истечении данного интервала совпадения ИО-2 с узким селектирующим импульсом не происходит, измеритель дальности переходит снова в режим поиска.
Угломерные (азимутальные) каналы РСБН
Напомним, что воздушная ситуация, в которой происходит измерение азимута (угла в горизонтальной плоскости) самолета, находящегося в зоне действия наземного радиомаяка, при помощи РСБН, представлена на рис. 4.3. При этом угломерный канал РСБН состоит из наземной аппаратуры (находящейся на радиомаяке) и бортовой аппаратуре (расположенной на самолете).
Наземная аппаратура угломерного канала РСБН представляет собой радиопередающее устройство, работающее в импульсном режиме излучения. Особенностью данной аппаратуры является равномерное вращение радиопередающей антенны (и, следовательно, соответствующей диаграммы направленности) вокруг вертикальной (по отношению к земной поверхности) оси  (см. рис. 4.3).
(см. рис. 4.3).
Бортовая аппаратура угломерного канала РСБН осуществляет прием высокочастотных импульсов, излучаемых наземным радиомаяком, и измерение величины . Структурная схема указанной бортовой аппаратуры приведена на рис. 4.7.
Функционирование этой бортовой аппаратуры осуществляется следующим образом.
Излученные радиомаяком импульсы поступают на приемную антенну и далее подаются на вход радиоприемного устройства 1. Видеоимпульсы с выхода данного радиоприемного устройства вводятся на входы двух устройств – формирования опорного сигнала (сигнал на входе этого устройства 2 задает начальный момент времени соответствующий нулевому значению азимутальной шкалы, т.е.  ) и формирования отсчетного сигнала (выходной сигнал данного устройства 3 характеризует азимут самолета). Устройство определения азимута 4 функционирует под воздействием выходных сигналов устройств 2 и 3 и вырабатывает значение измеренного азимута .
) и формирования отсчетного сигнала (выходной сигнал данного устройства 3 характеризует азимут самолета). Устройство определения азимута 4 функционирует под воздействием выходных сигналов устройств 2 и 3 и вырабатывает значение измеренного азимута .
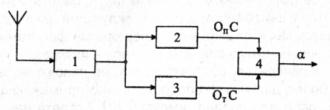 |
| Рис.4.7. Структурная схема бортовой аппаратуры угломерного канала РСБН: 1 – радиоприемное устройство; 2 – устройство формирования опорного сигнала; 3 –устройство формирования отсчетного сигнала; 4 –устройство определения азимута; ОпС – опорный сигнал; ОтС – отсчетный сигнал. |
Конкретная реализация узлов бортовой аппаратуры угломерного канала РСБН зависит от используемого метода углометрии. В подавляющем большинстве случаев применяются два метода измерения азимута:
– временной (характерен для отечественных РСБН);
– фазовый (характерен для зарубежных РСБН).
Рассмотрим варианты аппаратурного построения, реализующего эти методы.
Временной угломерный канал РСБН. Принцип измерения углового положения объекта (самолет) временным методом представлен на рис. 4.8 и заключается в предварительном определении временного интервала  между опорным сигналом (ОпС) и отсчетным сигналом (ОтС) и последующем пересчете данного временного интервала в соответствующее значение углового положения (азимута) объекта. При этом отсчет азимута
между опорным сигналом (ОпС) и отсчетным сигналом (ОтС) и последующем пересчете данного временного интервала в соответствующее значение углового положения (азимута) объекта. При этом отсчет азимута  производится от так называемого опорного направления ОН (таковым обычно выбирается направление на север), которому во времени соответствует момент возникновения опорного сигнала. Формирование опорного и отсчетного сигналов (и, соответственно, вычисление азимута
производится от так называемого опорного направления ОН (таковым обычно выбирается направление на север), которому во времени соответствует момент возникновения опорного сигнала. Формирование опорного и отсчетного сигналов (и, соответственно, вычисление азимута  ) происходит на борту самолета – по радионапряжениям, вырабатываемым и излучаемым в пространства радиомаяком.
) происходит на борту самолета – по радионапряжениям, вырабатываемым и излучаемым в пространства радиомаяком.
Радиомаяк, работающий на передачу, обладает двумя диаграммами направленности –  , неподвижной и ненаправленной, и
, неподвижной и ненаправленной, и  , вращающейся с постоянной скоростью (с угловой частотой вращения
, вращающейся с постоянной скоростью (с угловой частотой вращения  , равной 100 об/мин, или, что то же, с частотой вращения
, равной 100 об/мин, или, что то же, с частотой вращения  , равной 1,66 Гц) и состоящей из двух остронаправленных лепестков. При этом антенна, создающая диаграмму , излучает две радиоимпульсные последовательностиПИмп-35 (35 радиоимпульсов за один оборот вращающейся антенны) и ПИмп-36 (36 радиоимпульсов за оборот вращающейся антенны), а вращающаяся антенна, формирующая диаграмму , излучает в пространство непрерывное радиоколебание (из диапазона частот 772... 1000,5 МГц). Импульсные последовательности ПИмп-35 (с частотой повторения импульсов
, равной 1,66 Гц) и состоящей из двух остронаправленных лепестков. При этом антенна, создающая диаграмму , излучает две радиоимпульсные последовательностиПИмп-35 (35 радиоимпульсов за один оборот вращающейся антенны) и ПИмп-36 (36 радиоимпульсов за оборот вращающейся антенны), а вращающаяся антенна, формирующая диаграмму , излучает в пространство непрерывное радиоколебание (из диапазона частот 772... 1000,5 МГц). Импульсные последовательности ПИмп-35 (с частотой повторения импульсов  ) и ПИмп-36 (с частотой повторения импульсов
) и ПИмп-36 (с частотой повторения импульсов  ) связаны с вращением антенны, создающей диаграмму ):
) связаны с вращением антенны, создающей диаграмму ):
 , (4.3)
, (4.3)
где – частота вращения данной антенны, и предназначены для выработки (в момент совпадения двух импульсов из последовательностей ПИмп-35 и ПИмп-36) опорного сигнала, характеризующего опорное направление.
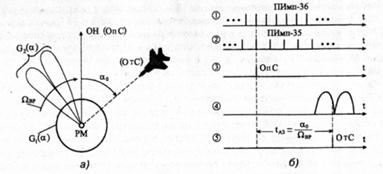 |
| Рис. 4.8. Принцип измерения азимута в угломерном канале РСБН с помощью временного метода: |
Здесь: а – диаграммы направленности наземного радиомаяка РМ ( и ); б – временные диаграммы; ОН – опорное направление; ОпС – опорный сигнал; ОтС – отсчетный сигнал; ПИмп-36 – последовательность, состоящая из 36 импульсов за один оборот направленной (вращающейся) антенны РМ; ПИмп-35 – последовательность, состоящая из 35 импульсов за один оборот направленной (вращающейся) антенны РМ; – диаграмма направленности неподвижной антенны; – диаграмма направленности вращающейся антенны.
Что касается отсчетного сигнала, то он формируется в бортовой аппаратуре при облучении самолета вращающейся диаграммой направленности (положение отсчетного сигнала соответствует местонахождению точки с максимальной крутизной, расположенной на заднем фронте первого колоколообразного импульса). Далее, по измеренному временному интервалу в бортовой аппаратуре вычисляется значение азимута самолета относительно опорного направления (на север):
 . (4.4)
. (4.4)
Структурная схема измерительной части бортовой аппаратуры угломерного канала РСБН представлена на рис. 4.9 (номера временных диаграмм соответствуют приведенным на рис. 4.8). Ввиду того, что данная измерительная часть входит в состав структуры, изображенной на рис. 4.7, нумерация блоков на рис. 4.9 продолжает нумерацию блоков, показанных на рис. 4.7.
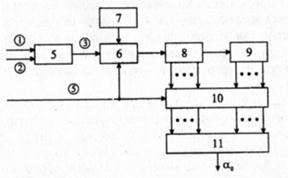 |
| Рис. 4.9. Структурная схема измерительной части бортовой аппаратуры угломерного канала РСБН: 5 – схема совпадений; 6 – схема включения: 7 – генератор счетных импульсов; 8 – первый счетчик; 9 – второй счетчик; 10 – схема переписи кода; 11 – вычислитель. |
Работа узлов, представленных на рис. 4.9, происходит следующим образом.
Две принятые импульсные последовательности ПИмп-36 (диаграмма 1) и ПИмп-35 (диаграмма 2) подаются с выхода радиоприемного устройства на входы схемы совпадения 5. В тот момент, когда два импульса последовательностей ПИмп-36 и ПИмп-35 совпадут, схема 5 выработает опорный сигнал ОпС (диаграмма 3), который далее поступит на схему включения 6
На второй вход схемы 6 подаются счетные импульсы, формируемые генератором 7 и обладающие частотой повторения  , равной 30 кГц. Эти импульсы начинают поступать через схему включения 6 на первый счетчик 8 с момента появления опорного сигнала ОпС. В момент прихода отсчетного сигнала ОтС (диаграмма 5) схема включения 6 закрывается, доступ счетных импульсов в первый счетчик 8 (и во второй счетчик 9) прекращается, и цифровой код, сформировавшийся в первом и втором счетчиках, через схему переписи кода 10 передается в вычислитель 11, который вырабатывает на своем выходе измеренное значение азимута
, равной 30 кГц. Эти импульсы начинают поступать через схему включения 6 на первый счетчик 8 с момента появления опорного сигнала ОпС. В момент прихода отсчетного сигнала ОтС (диаграмма 5) схема включения 6 закрывается, доступ счетных импульсов в первый счетчик 8 (и во второй счетчик 9) прекращается, и цифровой код, сформировавшийся в первом и втором счетчиках, через схему переписи кода 10 передается в вычислитель 11, который вырабатывает на своем выходе измеренное значение азимута
Необходимость постановки двух (первого 8 и второго 9) счетчиков объясняется дискретностью (10°) импульсной последовательности ПИмп-36, которой соответствует период следования импульсов  этой последовательности.
этой последовательности.
Первый счетчик 8 выполнен таким образом, что импульс его переполнения (от подачи на вход последовательности счетных импульсов) подается на вход второго счетчика 9 через каждый интервал времени  (через каждые 10° азимута). Таким образом, второй счетчик 9 подсчитывает целое число 10°-ных интервалов азимута, укладывающихся в пределах измеренной величины , а первый счетчик 8 содержит цифровой код (количество счетных импульсов), соответствующий дробной части 10°-го интервала. Вычислитель 11 компонует значения цифровых кодов, поступивших на него от первого и второго счетчиков в окончательную величину ..
(через каждые 10° азимута). Таким образом, второй счетчик 9 подсчитывает целое число 10°-ных интервалов азимута, укладывающихся в пределах измеренной величины , а первый счетчик 8 содержит цифровой код (количество счетных импульсов), соответствующий дробной части 10°-го интервала. Вычислитель 11 компонует значения цифровых кодов, поступивших на него от первого и второго счетчиков в окончательную величину ..
Фазовый угломерный канал РСБН. Принцип измерения углового положения объекта (самолета) фазовым методом представлен на рис. 4.10 и заключается в определении фазы низкочастотного (30 Гц) гармонического колебания, формируемого на борту самолета за счет вращения диаграммы направленности радиомаяка – с последующим пересчетом данной фазы в значение азимута самолета.
Рассмотрим работу наземного радиомаяка РМ более подробно.
Радиомаяк непрерывно излучает в пространство высокочастотный (из диапазона 108...118 МГц) гармонический сигнал, промодулированный по амплитуде частотно-модулированными колебаниями со средней частотой 9960 Гц. При этом излучаемый высокочастотный сигнал называется несущим, а модулирующие колебания — поднесущими. Использование поднесущих колебаний объясняется необходимостью задать опорное направление ОН (таковым обычно является направление на север), от которого отсчитывается азимут подлетающего самолета (рис. 4.10,а).
Дело в том, что антенна радиомаяка, а следовательно, и диаграмма направленности  этого радиомаяка, представляющая собой окружность со смещенным центром, вращается с угловой частотой
этого радиомаяка, представляющая собой окружность со смещенным центром, вращается с угловой частотой  , где
, где  Гц, т.е. в какой-то момент времени направление максимального излучения совпадает с опорным направлением. Этому моменту времени соответствует определенное значение (как правило, максимальное) частоты поднесущих колебаний. При этом частота поднесущих колебаний изменяется синхронно с вращением диаграммы направленности , а именно, с частотой 30 Гц.
Гц, т.е. в какой-то момент времени направление максимального излучения совпадает с опорным направлением. Этому моменту времени соответствует определенное значение (как правило, максимальное) частоты поднесущих колебаний. При этом частота поднесущих колебаний изменяется синхронно с вращением диаграммы направленности , а именно, с частотой 30 Гц.
Так формируется сигнал, излучаемый радиомаяком.
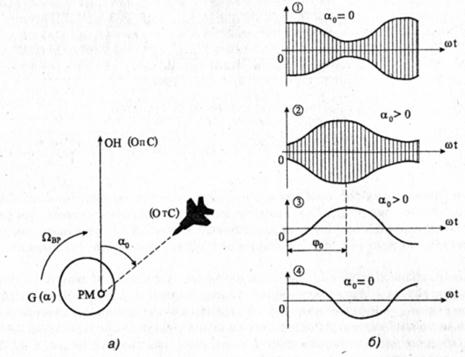 |
Рис. 4.10. Принцип измерения азимута в угломерном канале РСБН с помощью фазового метода: а – диаграмма направленности наземного радиомаяка РМ; б – временные диаграммы напряжений в бортовой радиоаппаратуре самолета; 1 – напряжение на входе радиоприемного устройства в случае расположения самолета на опорном направлении ОН (модуляция поднесущими колебаниями не показана); 2 – напряжение на входе радиоприемного устройства в случае расположения самолета на азимуте  (модуляция поднесущими колебаниями не показана); 3 – напряжение отсчетного сигнала ОтС; 4 – напряжение опорного сигнала ОпС. (модуляция поднесущими колебаниями не показана); 3 – напряжение отсчетного сигнала ОтС; 4 – напряжение опорного сигнала ОпС. |
Бортовая радиоаппаратура, находящаяся на самолете, должна принять этот сигнал, обработать его и определить азимут , на котором находится самолет относительно опорного направления ОН.
Прежде всего, отметим, что принятый радиосигнал, помимо введенных (в режиме излучения) в него амплитудно-модулирующих поднесущих колебаний, приобретет еще и дополнительную амплитудную модуляцию (с частотой Гц) за счет вращения диаграммы направленности . Это означает, что принятый на борту самолета радиосигнал (эпюры 1 и 2 на рис. 4.10,б) может быть записан как

 , (4.5)
, (4.5)
где  – фаза гармонического колебания частоты
– фаза гармонического колебания частоты  Гц, соответствующая азимуту самолета;
Гц, соответствующая азимуту самолета;  – коэффициент глубины амплитудной модуляции, создаваемой вращением диаграммы направленности;
– коэффициент глубины амплитудной модуляции, создаваемой вращением диаграммы направленности;  – коэффициент глубины амплитудной модуляции, создаваемой поднесущими колебаниями;
– коэффициент глубины амплитудной модуляции, создаваемой поднесущими колебаниями;  – индекс частотной модуляции.
– индекс частотной модуляции.
Иными словами, в принятом на борту самолета радиосигнале содержится информация как о положении опорного направления (в частоте поднесущих колебаний), так и об азимуте самолета (в амплитуде принятого радиосигнала).
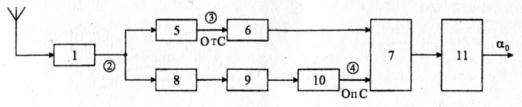 |
| Рис. 4.11. Структурная схема бортовой аппаратуры фазового угломерного канала РСБН: 1 – радиоприемное устройство; 5 – первый фильтр; 6 – усилитель; 7 – фазовый детектор; 8 – второй фильтр; 9 – усилитель-ограничитель; 10 – частотный детектор; 11 – преобразователь-вычислитель. |
Структурная схема бортовой аппаратуры фазового угломерного канала РСБН представлена на рис. 4.11. При этом поскольку данная схема является фактически конкретизацией структуры, изображенной на рис. 4.7, то нумерация узлов, приведенных на рис. 4.11, продолжает нумерацию узлов, показанных на рис. 4.7.
Радиоколебания, принятые приемной антенной, поступают на вход радиоприемного устройства 1. Далее напряжение с выхода этого устройства разветвляется на два канала — верхний и нижний. В верхнем канале данное напряжение поступает на первый фильтр 5 (на его выходе формируется отсчетный сигнал ОтС, фаза которого характеризует азимут самолета – диаграмма 3 на рис. 4.10,б), а затем, после усиления в усилителе б этот отсчетный сигнал поступает на первый вход фазового детектора 7. В нижнем канале указанное напряжение вводится во второй фильтр 8, затем проходит через усилитель-ограничитель 9 (в котором срезается паразитная амплитудная модуляция) и частотный детектор 10 (на его выходе вырабатывается, с учетом действия частот поднесущих колебаний, опорный сигнал ОпС – диаграмма 4 на рис. 4.10,б), после чего опорный сигнал поступает на второй вход фазового детектора 7. На выходе фазового детектора 7 формируется напряжение, пропорциональное разности фаз между опорным и отсчетным сигналами. Данное напряжение вводится в преобразователь-вычислитель 11, который вырабатывает на своем выходе значение азимута самолета.
В заключение приведем некоторые основные технические характеристики РСБН:
Дальномерный канал РСБН:
- диапазон частот в запросном режиме, Мгц 772…813
- диапазон частот в ответном режиме, Мгц 940…1000
- минимальная мощность передатчика радиомаяка, кВт 30
- пороговая чувствительность радиоприемного устройства, дБ Вт 136
- точность определения дальности, м 200
Азимутальные каналы РСБН:
а) временной:
- диапазон частот, МГц 874…935
- точность определения азимута, º 2,35
- минимальная мощность передатчика радиомаяка, кВт 0,08
б) фазовый:
- диапазон частот, МГц 108…118
- точность определения азимута, º 2,35
- минимальная мощность передатчика радиомаяка, кВт 0,08
- индекс частотной модуляции 15…17
Общие показатели:
- пропускная способность РСБН, не менее 100 самолетов
Потребляемая мощность от сети:
- 27 В постоянного тока, Вт 255
- 155 В, 400 Гц,  120
120
Масса, кг:
- всего комплекта (без кабелей) 73
- моноблока радиоприемного устройства 31,8
- моноблока радиопередающего устройства 11,3
- моноблока измерений и обработки 18,3
Объем моноблоков (с амортизационными рамами), дм3:
- радиоприемного устройства 42,9
- радиопередающего устройства 11,6
- измерений и обработки 32,3








