 2015-04-01
2015-04-01 655
655Анализ статических и динамических свойств двигателей показывает, что их эксплуатация невозможна без установки на них автоматических регуляторов и устройств. Например, в стационарных условиях двигатель должен поддерживать заданный скоростной режим независимо от нагрузки.
Для оценки возможностей такой работы необходимо обратиться к взаимному влиянию характеристик двигателя 1,2 (см. рис. 1.6) и потребителя ХП1, ХП2 на поле возможных режимов. Если принять, что ∆ω - допустимое изменение скоростного режима при сбросе нагрузки, то легко убедиться, что даже незначительное уменьшение сопротивления (переход с характеристики ХП1 на характеристику ХП2 повлечет за собой изменение угловой скорости, выходящее за намеченную границу, так как новый режим соответствует точке А1.
Для ограничения изменений скоростных режимов в заданном диапазоне следует при изменении сопротивления потребителя перейти на новую частичную характеристику 2 двигателя, тогда новый режим работы установится в точке А2. Однако для этого необходимо по мере увеличения частоты вращения воздействовать на орган управления двигателя и перемещать его в сторону уменьшения подачи топлива. Наоборот, при увеличении сопротивления и понижения угловой скорости подача топлива должна увеличиваться.
Дифференциальное уравнение двигателя (1.24) или (2.14) показывает, что на κ (орган управления двигателем) можно воздействовать с помощью автоматического регулятора, измеряющего различные параметры, характеризующие неустановившиеся режимы его работы (рис. 3.1). Прежде всего, можно измерить изменение самого регулируемого параметра, т. е. φ, и в зависимости от его значения воздействовать на κ. Такой принцип регулирования получил наименование принципа Ползунова—Уатта (см. рис. 1.2). Уравнения этих регуляторов, связывающих φ и κ, в самом простейшем случае можно представить в виде
δz η=φ (3.1)
где δz - коэффициент пропорциональности; η = ∆ z/z0 - безразмерное перемещение муфты 3 регулятора (см. рис. 1.2 ).
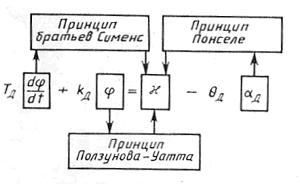
Рис 3.1. Схема формирования принципов регулирования
Выработку регулирующего воздействия регулятором можно ускорить, если измерять не φ, a dφ/dt. Такой регулятор, называется акселерометром. Он использует принцип братьев Сименс (1845 г.), которые предложили схему такого устройства (рис. 3.2). В регуляторах братьев Симменс перестановочная сила пропорциональна ускорению и поэтому ее воздействие на орган управления совпадает с началом изменения скоростного режима.
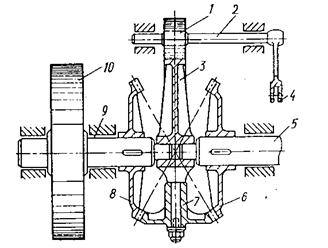
Рис 3.2. Автоматический регулятор, действующий на основе принципа братьев Симменс:
1, 6, 7, 8 – зубчатые колеса; 2 – валик; 3 – зубчатый сектор; 4 – поводок; 5 – вал двигателя; 9 – вал регулятора; 10 - маховик
Так уравнение (1.8) показывает, что ускорение dφ/dt получает максимальное значение  сразу же в момент нарушения установившогося режима, когда возникает отклонение М ≠ Мс. В самом упрощенном виде уравнение регулятора представляется в форме:
сразу же в момент нарушения установившогося режима, когда возникает отклонение М ≠ Мс. В самом упрощенном виде уравнение регулятора представляется в форме:
δz η = dφ/dt (3.2)
В автоматических регуляторах для ДВС импульс по ускорению всегда используется одновременно с импульсом по отклонению. Такое регулирование осуществляется при наличии главной отрицательной обратной связи (κ = -η). В связи с этим импульс по ускорению должен усиливать действие главной отрицательной обратной связи и (при положительном значении dφ/dt)вызывать отрицательное изменение выходной координаты. Это свойство моделируется при совместном решении уравнений
δz η = - dφ/dt κ = -η (3.3)
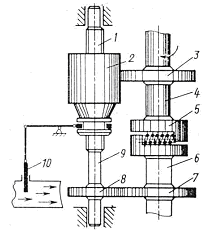
Рис 3.3. Автоматический регулятор, работающий по принципу Панселе:
1 – ходовой винт; 2 – подвижное зубчатое колесо; 3, 7, 8, - зубчатые колеса; 4 - вал двигателя; 5 – упругая муфта; 6 – вал потребителя; 9 – вал регулятора; 10 – дроссельная заслонка. 
Если измерить изменение нагрузки (т. е. Мс), то регулирование можно осуществить по принципу Панселе. Схема соответствующего регулятора приведена на Рис.3.3. В таком регуляторе вал 4 двигателя и вал потребителя связаны упругой муфтой, и относительный угол поворота этих валов увеличивается при возрастании нагрузки и уменьшается при ее снижении. Поэтому колесо 2, скрепленное с валом 9 ходовым винтом1 при изменении нагрузки имеет осевое перемещение и через систему рычагов действует на дроссельную заслонку 10, изменяющую подачу топлива в двигатель.
Каждый из трех принципов регулирования имеет свои положительные и отрицательные особенности, которые необходимо учитывать при выборе типа регулятора. При установке на двигатель автоматического регулятора создается САР, в которой двигатель ДВС и автоматический регулятор АР взаимодействуют друг с другом (Рис. 1.1). Поэтому при анализе динамических свойств такой системы уравнения элементов, составляющих систему, необходимо рассматривать совместно. В САР выходная координата регулятора  непосредственно воздействует на орган управления двигателя
непосредственно воздействует на орган управления двигателя  . Такая связь при увеличении угловой скорости должна приводить к уменьшению подачи топлива, что обеспечивается САР отрицательной обратной связью, характеризуемой условием:
. Такая связь при увеличении угловой скорости должна приводить к уменьшению подачи топлива, что обеспечивается САР отрицательной обратной связью, характеризуемой условием:









