 2015-05-06
2015-05-06 396
396Вводные замечания. Электромагнитный ДМ состоит из сердечника, якоря и катушки. Сердечник и якорь выполняют конструкционной или кремнистой стали, а также из железа Армко. В случае, когда ДМ работает на переменном токе, применяют листовую электротехническую сталь, пермаллой, а также сталь марки ХВП. По конструктивному исполнению различают: ДМ с повторным якорем, ДМ клапанного типа и соленоидного типа (рис.1)
Рис. 1. Конструктивные схемы электромагнитных ДМ.
На рис. 1. Схемы б) и в) используются во вспомогательных механизмах, например, в арретирующих устройствах, механизмах включения муфт и т.п.
1.1 Вращающий момент.
При инженерных расчетах потоками рассеяния можно пренебречь и уравнение вращающего момента записать в виде:

где: i – ток, протекающий через обмотку Э.М.
L0 – коэффициент самоиндукции, вычисленный по магнитному потоку в воздушном зазоре,
θ – угол поворота якоря Э.М.
При насыщенной системе магнитное сопротивление воздушного зазора обычно значительно больше магнитного сопротивления сердечника и якоря. Пренебрегая сопротивление железа, имеем:

где:  - число витков катушки,
- число витков катушки,
 - проводимость воздушного зазора.
- проводимость воздушного зазора.
Подставим (2) в (1):

Если Э.М. питается постоянным током, то величина тока определяется напряжением, подаваемым на обмотку и сопротивлением обмотки, но не зависит от угла поворота якоря, т.е.:

Если величину момента мерить в (г. См), то

При питании Э.М. переменным током и при неизменной величине напряжения, сила тока в обмотке зависит от угла поворота якоря.
Если пренебречь потерями энергии в магнитопроводе и омическим падением напряжения в обмотке, то:

где: U – подведенное напряжение (эффективное),
Е – э.д.с. в обмотке,
f – частота питающего напряжения,
Фmax – амплитуда магнитного потока, связанного с обмоткой.
С другой стороны, если пренебречь, как и ранее, магнитным сопротивлением сердечника и якоря, то:

где Уmax – амплитудное значение тока в обмотке.
Исключим из (6) и (7) значение Фmax и получим:
Подставим значение L0 и Уmax в формулу (3) и выполнив преобразования, найдем, что амплитудное значение электромагнитного момента выражается:

Т.к. U = Umax·sin t, то во времени:

Таким образом, корректирующий момент имеет постоянную и переменную составляющие. Наличие переменной составляющей благоприятно влияет на работу всей системы.
Значение проводимости воздушного зазора , а следовательно, и величина момента существенно зависят от профиля якоря.
В простейшем случае профиль якоря очерчен по дуге окружности (рис.2).
В этом случае:

При питании постоянным током будем иметь:

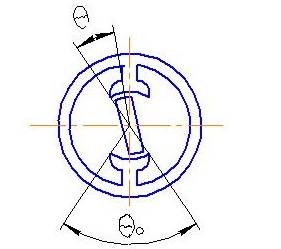
Рис.2. Профиль якоря.
При питании переменным током:

В обоих случаях момент обращается в нуль при совпадении оси якоря с осью полюсов.
Данный профиль обеспечивает работу в области малых углов θ не превышающих θ0.
Если требуется большой угол, тогда нужно профиль очертить по спирали, гиперболе и т.п.
В этом случае удается получить значения углов θ до 120  150°.
150°.
1.2. Конструктивные разновидности Д.М. с поворотным якорем.
Конструктивные схемы ДМ приведены на рис.3.
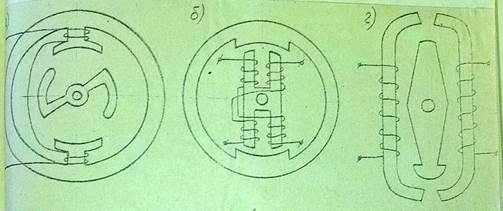
Рис. 3. Варианты конструктивных схем электромагнитных ДМ.
Схема а) применяется с целью уменьшения веса якоря. На оси гироприбора устанавливают два подобных ДМ, каждый из которых создает момент определенного знака.
В схеме б) использована Н-образная форма якоря.
В зависимости от того, в какую пару из двух последовательно соединенных обмоток подается ток, электромагнит развивает момент того или иного знака.
Недостатки этих схем: малый угол поворота и большой вес подвижных элементов. Максимальный угол поворота порядка  10°.
10°.
Катушки датчика по схеме г) могут быть включены дифференциально (рис.4).
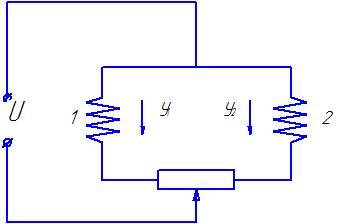
Рис.4. Дифференциальная схема включения (движок потенциометрического ДУ связан с ЧЭ гироприбора).








