 2015-04-23
2015-04-23 694
694Проекция момента силы относительно точки на некоторую ось, проходящую через эту точку называется моментов силы относительно оси.
Момент силы относительно оси вычисляется как момент проекции силы F→ на плоскость Π, перпендикулярную оси, относительно точки пересечения оси с плоскостью Π:
Mz(F→)=Mz(F→Π)=±FΠh.
Знак момента определяется направлением вращения, которое стремится придать телу сила F→Π. Если, глядя по направлению оси Oz сила вращает тело по часовой стрелке, то момент берется со знаком ``плюс'', иначе - ``минус''.
20. Приведение одной силы к центру. Приведение системы сил к центру. Главный вектор и главный момент системы сил. 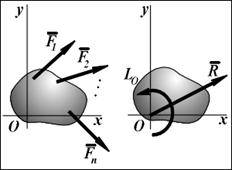
Теорема о приведении системы сил:
Любая система сил, действующих на абсолютно твердое тело, может быть заменена одной силой R, равной главному вектору этой системы сил и приложенной к произвольно выбранному центру О, и одной парой сил с моментом L O, равным главному моменту системы сил относительно центра О.
Такая эквивалентная замена данной системы сил силой R и парой сил с моментом L O называют приведением системы сил к центу О.
Рассмотрим здесь частный случай приведения плоской системы сил к центру О, лежащему в той же плоскости. В этом случае система сил заменяется одной силой и одной парой сил, лежащих в плоскости действия сил системы. Момент этой пары сил можно рассматривать как алгебраическую величину LO и изображать на рисунках дуговой стрелкой (алгебраический главный момент плоской системы сил).
В результате приведения плоской системы сил к центру возможны следующие случаи:
- если R = 0, L O = 0, то заданная система является равновесной;
- если хотя бы одна из величин R или L O не равна нулю, то система сил не находится в равновесии.
При этом: - Eсли R = 0 и L O
 0, то система сил приводится к одной паре сил с моментом L O, причем в этом случае величина момента L O не зависит от выбора центра О.
0, то система сил приводится к одной паре сил с моментом L O, причем в этом случае величина момента L O не зависит от выбора центра О. - Eсли R 0, то при любом значении L O система сил приводится к равнодействующей силе.
Главным вектором системы сил называется вектор R, равный векторной сумме этих сил: R = F 1 + F 2 +... + F n =  F i.
F i.
Для плоской системы сил ее главный вектор лежит в плоскости действия этих сил.
Главным моментом системы сил относительно центра O называется вектор L O, равный сумме векторных моментов этих сил относительно точки О: L O = M O(F 1) + M O(F 2) +... + M O(F n) = M O(F i).
Вектор R не зависит от выбора центра О, а вектор L O при изменении положения центра О может в общем случае изменяться.
Для плоской системы сил вместо векторного главного момента используют понятие алгебраического главного момента. Алгебраическим главным моментом LO плоской системы сил относительно центра О, лежащего в плоскости действия сил, называют сумму алгебраических моментов этих сил относительно центра О.








