 2015-05-26
2015-05-26 7070
7070Глава 13. OBPAEOTKA СИГНАЛОВ
В ПРИЕМНИКЕ
13.1. ОСНОВНЫЕ ФУНКЦИИ ПРИЕМНИКА
Условия приема. Исходя из особенностей передачи электрических сигналов по линиям электросвязи (см. ч. 3), можно считать, что в подавляющем большинстве случаев наблюдаются следующие условия приема:
1. Принятый сигнал из-за значительного ослабления линий связи (как проводных, так и радио) имеет весьма низкий уровень: 1... 10 мкВ в магистральной радиосвязи на метровых волнах, 10-"...10-'4 Вт — в спутниковых каналах, — 50... — 55 дБо —;
в канале тональной частоты кабельных линий и т. д.
2. На входе приемника, кроме полезного модулированного сигнала, всегда присутствуют помехи. Это не только внешние и внутренние шумы различного происхождения, но и сигналы посторонних -радиосредств в радиосвязи, других каналов многоканальной электросвязи, которые для заданного сигнала являются помехами. Суммарная мощность всех помех может в сотни и тысячи раз превосходить мощность полезного сигнала. Так, близко расположенный передатчик может наводить в антенне ЭДС до 0,1...05 В.
3. При организации приема всегда имеются предварительные (априорные) сведения о передаваемом сигнале. К ним относятся сведения о несущей частоте, виде модуляции, амплитуде, длительности, коде и т. д. Это весьма важное обстоятельство, так как
абсолютно неизвестный сигнал нельзя принять (как различить, чем сигнал отличается от помехи?).
Известные параметры сигнала используются в приемнике для лучшего отделения сигнала от помехи. Чем больше мы знаем о сигнале, тем совершенней могут быть методы приема. Однако сигнал, о котором заранее все знаем, никакой информации не несет.
Задача приема. В зависимости от вида и назначения системы связи при приеме сигналов возникают следующие основные задачи: 1) обнаружение сигналов, 2) различение сигналов и 3) восстановление сигналов.
При обнаружении сигналов задача сводится к получению ответа на вопрос, имеется на входе приемника сигнал или нет, точнее, имеются ли на входе сигнал плюс помеха или толькопомеха.
Это типичная задача радиолокации, она также имеет место в системах с пассивной паузой, когда при передаче элемента кодовой комбинации 0 сигнал отсутствует (пауза).
При передаче двух и более дискретных сигналов возникает задача не обнаружения, а различения сигналов. Здесь необходимо дать ответ на вопрос: какой из сигналов s>, или s1, или s2,....., или sm имеется на входе? Ответ на этот вопрос определяется уже не свойствами каждого сигнала в отдельности, а их различием. Основное значение имеет степень отличия одного сигнала от другого. Естественно стремиться к тому, чтобы это отличие было значительным и устойчивым к воздействию помех. Этими соображениями руководствуются при выборе типа сигнала и вида модуляции.
Случай обнаружения можно рассматривать как частный случай различия двух сигналов, когда один из них тождественно равен нулю.
Задача восстановления первичного сигнала существенно отличается от задач обнаружения и различения сигналов. Она состоит в том, чтобы получить принятый первичный сигнал uпр (t),наименее отличающийся от переданного u(t), т. е. восстановить
форму переданного первичного сигнала. При этом переданный первичный сигнал и(t) заранее неизвестен, известно лишь, к какому классу он принадлежит (речевой, вещательный, телевизионный и др.) и некоторые его параметры. Задача восстановления
возникает и решается при передаче непрерывных (аналоговых) первичных сигналов и является более трудной, так как обычно от приемника требуется высокая точность восстановления.
Главные функции приемника. Условия приема требуют выполнения в приемнике следующих основных операций над принятым совместно с помехами сигналом: обработка, усиление, демодуляция. Эти главные функции приемника взаимосвязаны ме-
(жду собой и выполняются не обязательно в указанной выше последовательности.
Обработка принятого сигнала, под которой понимают процесс выделения сигнала из его смеси с помехами, является одной из важнейших функций приемника. Основная цель обработки — увеличение отношения сигнала к помехе. Только обеспечив превышение сигнала над помехой, можно его усиливать и демодулировать. Обработка сигналов обычно не сосредоточена в какой-то части приемника, а является неотрывной функцией всех его блоков и, как правило, сводится к тем или иным методам фильтрации.
Извлечение из принимаемого сигнала модулирующего первичного сигнала происходит в демодуляторе приемника. Однако неследует думать, что демодуляция всего лишь операция, обратнаямодуляции, выполняемая над пришедшим из канала модулированным сигналом. Эта простейшая обратная операция выделенияинформационного параметра переносчика осуществляется детектором.
Задача демодулятора является более широкой. В результате искажений и
воздействия помех пришедший к детектору сигнал может существенно отличаться от переданного. Для лучшего воспроизведения первичного сигнала принятый сигнал не
только детектируется, а также подвергается анализу с учетом всех априорных сведений о переданном сигнале, поэтому демодулятор, помимо детектора, содержит цепи последетекторной обработки.
Додетекторная обработка обычно осуществляется резонансными усилителями в радиоприемных устройствах различного на- значения, полосовыми фильтрами в аппаратуре многоканальной электросвязи, обеспечивающими необходимую частотную селекцию.
При приеме непрерывных первичных сигналов функцию последетекторной обработки выполняет фильтр нижних частот, дающий улучшение качества подачи детектированного сигнала к воспроизводящему устройству.
При приеме дискретных первичных сигналов в функцию приемника не входит восстановление формы переданного сигнала, поскольку она известна. В демодуляторе в результате анализа принятого сигнала должно быть принято решение, какой из стандарт
ных дискретных сигналов передавался. Это решение поступает к декодеру. Та часть демодулятора, которая осуществляет анализ параметров приходящих сигналов и принимает решение о переданном сигнале, называется решающим устройством (или решающей схемой). Для двоичных сигналов это обычно сравнивающее устройство, подключаемое к целям последетекторной обработки. Цель обработки состоит в таком преобразовании сигналов, чтобы они имели максимальное отличие от помех и друг от друга. Тогда уменьшается вероятность ошибочных решений.
Обобщенная структурная схема демодулятора, осуществляющего вышеприведенные операции над сигналами, приведена на рис. 13.1. В некоторых случаях при приеме дискретных сигналов детектор может отсутствовать. В этом случае в демодуляторе про водятся обработка и анализ дискретно-модулированных сигналов и по их различию принимается решение.
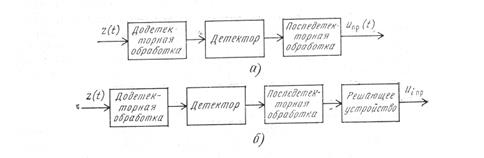
Рис. 13.1 Структурная схема обработки сигналов в демодуляторе: а – непрерывных сигналов; б – дискретных сигналов
Усиление сигналов до величин, при которых могут нормально работать детектор, решающее или воспроизводящее устройства, производится совместно с их обработкой фильтрацией. В настоящее время благодаря освоению транзисторов, микросхем, СВЧ и квантовых приборов особых трудностей в получении требуемого коэффициента усиления не возникает. Главное внимание при проектировании усилителей обращается на линейность АЧХ и ФЧХ в полосе частот сигнала, шумовые свойства и распределение усиления в канале связи.
Когерентный и некогерентный приемы. Любой модулированный сигнал при гармонической несущей характеризуется начальной фазой, которую можно учитывать или не учитывать при приеме. Если прием производится с учетом начальной фазы, то он называется когерентным; прием без учета фазы- некогерентный. Обычно сведения о начальной фазе принимаемого сигнала используются при детектировании.
Детектирование сигнала с учетом начальной фазы (когерентный прием) обеспечивает увеличение отношения сигнал-помеха на выходе детектора в 2 раза по сравнению с некогерентным приемом. Это объясняется тем, что на выходе когерентного детектора напряжение помехи пропорционально косинусу разности фаз сигнала  и помехи
и помехи  ,. Составляющие помехи с
,. Составляющие помехи с  ослабляются по косинусоидальному закону, а помехи с
ослабляются по косинусоидальному закону, а помехи с  вообще не оказывают никакого мешающего действия на сигнал, поскольку cos(
вообще не оказывают никакого мешающего действия на сигнал, поскольку cos( ) =0.
) =0.
Цифр о вая обработка. Развитие микроэлектроники и ЭВМ позволяет перейти от аналоговой к цифровой обработке сиг- налов, в первую очередь последетекторной. Для этого непрерыв- ный сигнал одним из способов преобразуется в цифровой (см. ф 16.2). Затем с помощью микропроцессора или специализирован- ной ЭВМ проводятся математические операции над числами. Это и есть цифровая обработка. При этом можно обеспечитывысокую ее точность и быструю адаптацию к изменяющимся внешним ус- ловиям (достаточно сменить программу действий).
Цифровая обработка.не только позволяет осуществлять традиционные операции обработки (фильтрация, интегрирование, частотное и временное разделение сигналов и др.), но и выполнять сложные, ранее трудно реализуемые методы разделения сигнала и помех. За ней будущее техники электросвязи.
13.2. ФИЛЬТРАЦИЯ НЕПРЕРЫВНЫХ СИГНАЛОВ
Оптимальный фильтр. Идея частотной фильтрации основана на отличии спектров полезного сигнала и помехи. При приеме непрерывных сигналов задачей приемника является восстановление формы переданного первичного сигнала. От фильтров обработки требуется не только подавление помехи (узкая полоса пропускания), но и неискаженная передача сигнала (широкая полоса пропускания). Какие же характеристики должен иметь фильтр с такими противоречивыми требованиями к нему?
Естественным является стремление разработчиков реализовать наилучший (оптимальный) фильтр. Общей оценкой качества передачи непрерывных сигналов является среднеквадратическая разность (ошибка)  (1,5), поэтому оптимальным будет фильтр, минимизирующий ее.
(1,5), поэтому оптимальным будет фильтр, минимизирующий ее.
Задача отыскания оптимального фильтра непрерывных сигналов по критерию минимума в начале 40-х годов была решена независимо выдающимися математиками нашего времени акад. А. Н. Колмогоровым и американским ученым Н.Винером. Найденный ими фильтр называют оптимальным линейным фильтром Колмогорова — Винера. Параметры фильтра определяются спектральными характеристиками сигнала и помех.
Передаточная амплитудно-частотная характеристика фильтра
 (13.1)
(13.1)
где Gs( ), Gn() — спектральные плотности мощности сигнала и
), Gn() — спектральные плотности мощности сигнала и
помехи соответственно. Фазочастотная характеристика при любых, сигналах и помехах должна быть линейной, поскольку только линейная ФЧХ обеспечивает отсутствие линейных искажений
сигнала.
Анализ АЧХ фильтра Колмогорова— Винер а.
В общем случае из (13.1) следует, что когда спектры сигнала и помехи полностью или частично перекрываются, коэффициент передачи оптимального фильтра уменьшается с увеличением спектра помехи. Тем самым в оптимальном фильтре создаются условия,
при которых подавление спектра помехи сопровождается возможно меньшим подавлением (искажением) спектра сигнала.
На практике в системах электросвязи при фильтрации непрерывных сигналов наиболее часто встречаются следующие случаи:
1. Спектры сигнала и помехи имеют примерно одинаковую интенсивность, но не перекрываются, т. е. для тех частот а, где спектральная плотность мощности сигнала Gs()  0, помехи отсутствуют: Gn() =0 и наоборот (рис. 13.2,a). Это типичный случай многоканальной электросвязи с частотным разделением каналов, радиосвязи, где помехами являются сигналы других каналов или посторонних радиостанций. Из (13.1) получим
0, помехи отсутствуют: Gn() =0 и наоборот (рис. 13.2,a). Это типичный случай многоканальной электросвязи с частотным разделением каналов, радиосвязи, где помехами являются сигналы других каналов или посторонних радиостанций. Из (13.1) получим
 . (13.2)
. (13.2)
В этом случае оптимальным оказывается идеальный полосовой (или низкочастотный) фильтр, полоса пропускания которогосовпадает с полосой, занимаемой сигналом. Физически этот результатлегко объясним: фильтр выделяет спектр сигнала и полностью подавляет спектр помехи. На выходе такого фильтра оказывается сигнал, полностью «очищенный» от помехи, что и тре-
Рис. 13.2 Амплитудно-частотная характеристика оптимального фильтра: а – спектры сигнала помехи не перекрываются; б – спектры сигнала и помехи перекрываются
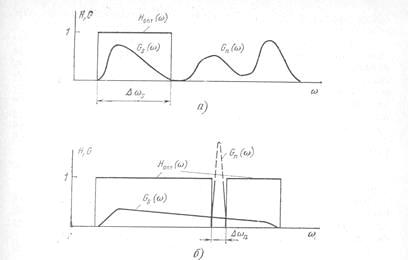
буется для получения наилучшего качества восстановления сигнала.
2. Спектры сигнала и помехи перекрываются, но интенсивность (спектральная плотность мощности) помехи намного меньше сигнала, т. е.  Такими помехами являются внутренние и внешние помехи типа белого шума в правильно спроектированных каналах связи, когда отношение сигнал-помеха много больше единицы. Тогда в знаменателе уравнения (13.1) значением Gn() можно пренебречь и снова получить для Нопт () соотношение (13.2): оптимальным оказывается идеальный фильтр, описанный в п. 1.
Такими помехами являются внутренние и внешние помехи типа белого шума в правильно спроектированных каналах связи, когда отношение сигнал-помеха много больше единицы. Тогда в знаменателе уравнения (13.1) значением Gn() можно пренебречь и снова получить для Нопт () соотношение (13.2): оптимальным оказывается идеальный фильтр, описанный в п. 1.
3. Спектры сигнала и помехи перекрываются, но помеха является узкополосной по сравнению с сигналом, а ее спектральная плотность мощности намного превышает спектральную плотность мощности сигнала:  Это случай воздействия на
Это случай воздействия на
сигнал мощных сосредоточенных помех (фон переменного тока 50 Гц, контрольные частоты в многоканальной электросвязи и др.). Из (13.1) следует, что

т. е. в таких случаях в тракт приемника, кроме идеального полосового фильтра, включается идеальный заграждающий фильтр, обеспечивающий подавление помехи в ее полосе (рис. 13.2,б).
Частотные фильтры систем связи. Из теории оптимальной фильтрации следует, что в большинстве случаев для наилучшего разделения сигнала и помехи требуются идеальные полосовые, низкочастотные или режекторные фильтры. Но из теории цепей известно, что идеальные фильтры практически нереализуемы, поэтому в системах передачи непрерывных сигналов используют фильтры с характеристиками, в той или иной степени приближающимися к идеальным. Требования к АЧХ как в полосе пропускания, так и в полосе задерживания обычно задаются ГОСТ на аппаратуру.
Находят применение следующие типы фильтров:
Баттерворта с максимально плоской амплитудно-частотной характеристикой в полосе пропускания;
Чебышева с равновеликими пульсациями амплитуды в полосе пропускания и монотонным затуханием в полосе задерживания либо с равновеликими пульсациями в полосе задерживания и максимально плоской характеристикой в полосе пропускания;
Гаусса (Бесселя) с линейной фазо-частотной характеристикой и некоторые другие.
Традиционно в аппаратуре связи использовались и продолжают использоваться LC-фильтры. Эти фильтры достаточно дешевы, легко перестраиваются по частоте, обладают малыми собственными потерями и, соответственно, малыми собственными шумами. Это позволяет применять их во входных цепях малошумящих усилителей.
В проводных системах связи фильтры обычно реализуются в виде одного фильтра высокого порядка (так называемые полиномиальные фильтры сосредоточенной избирательности). В усилительных трактах радиоприемных устройств с невысокими требованиями к избирательности применяется так называемая распределенная избирательность, когда одноконтурные или двухконтурные фильтры помещаются в, разных каскадах. Параметры таких фильтров хуже полиномиальных, но при заданной добротности звеньев каскадная реализация позволяет получить более узкую полосу пропускания.
Кроме LC-фильтров, в настоящее время на низких и средних частотах (до единиц мегагерц) эффективно используются активные RC-фильтры, на более высоких частотах — отрезки длинных линий (см. ф 8.8).
Большие потенциальные возможности по фильтрации на частотах до десятков мегагерц открываются с применением цифровых фильтров и фильтров на основе пьезотроник и (кварцевые, пьезокерамические, электромеханические пьезофильтры и др.).
Они по некоторым параметрам, в частности по приближению АЧХ к прямоугольной, существенно превышают LC-фильтры.В конкретной аппаратуре применение тех или иных фильтроврашается на основе технико-экономического анализа.
13.3. ОБРАБОТКА ДИСКРЕТНЫХ СИГНАЛОВ
Согласованная фильтрация. Одним из основных методов обработки дискретных сигналов является фильтрация. Цель фильтрации такая же, как и при приеме непрерывных сигналов, но требования к фильтру существенно другие. Конечно, фильтр должен подавлять помеху и чем больше, тем лучше, однако при этом допускается искажение формы сигнала. Напомним, что при приеме дискретных сигналов основной задачей приемника является обнаружение или различение сигналов. На фоне помех сигнал легче обнаружить, если он имеет импульсный характер и по амплитуде превышает помехи (рис. 13.3). Качество обнаружения сигналов будет тем лучше, чем больше отношение пиковой мощности сигнала к дисперсии (средней мощности) помехи.
Фильтр, который обеспечивает максимальное отношение сигнал-помеха на выходе, получил название оптимального согласованного фильтра. Характеристики согласованного фильтра для заданного сигнала s(t) при воздействии на него помехи типа белого шума со спектральной плотностью мощности N0 следующие: комплексная передаточная функция
 (13.3)
(13.3)
 импульсный отклик
импульсный отклик
 (13.4)
(13.4)
отношение сигнал-помеха на выходе
 (13.5)
(13.5)
где F" () =  — функция, комплексно сопряженная со спектром сигнала;
— функция, комплексно сопряженная со спектром сигнала;  с — произвольный коэффициент пропорциональности, t0 — момент, при котором амплитуда сигнала на выходе фильтра принимает максимальное значение (задержка в фильтре); Ws — энергия сигнала.
с — произвольный коэффициент пропорциональности, t0 — момент, при котором амплитуда сигнала на выходе фильтра принимает максимальное значение (задержка в фильтре); Ws — энергия сигнала.
Из (13.3) следует, что комплексная передаточная функция согласованного фильтра является величиной, комплексно сопряженной со спектром сигнала (с точностью до постоянной задержки, определяемой множителем  ). Если выражение (13.3) переписать в виде двух равенств
). Если выражение (13.3) переписать в виде двух равенств

то из них видно, что АЧХ согласованного фильтра с точностью до постоянного множителя совпадает с амплитудным спектром сигнала, а ФЧХ — с фазовым спектром сигнала, но имеет противоположный знак. Таким образом, передаточная функция фильтра полностью определяется спектром сигнала, «согласована» с ним. Отсюда и название — согласованный фильтр.
Фаза сигнала на выходе согласованного фильтра

При t=to  (t0) =0, т. е. в момент t0 все гармонические составля-
(t0) =0, т. е. в момент t0 все гармонические составля-
 Рис. 13.3 Передаточная АЧХ фильтра, согласованного с прямоугольным импульсом: а – нормированный амплитудный спектр прямоугольного импульса; б – АЧХ согласованного фильтра
Рис. 13.3 Передаточная АЧХ фильтра, согласованного с прямоугольным импульсом: а – нормированный амплитудный спектр прямоугольного импульса; б – АЧХ согласованного фильтра
ющие сигнала имеют одинаковую фазу и складываются арифметически, образуя пик сигнала на выходе фильтра. Спектральные составляющие помехи на входе фильтра имеют случайную фазу, и случайный характер фаз сохранится после прохождения помехи через согласованный фильтр, поэтому результат суммирования спектральных составляющих помехи на выходе фильтра будет случайным и вероятность образования ими большого
выброса в момент t=t0 мала. Этим физически и объясняется тот факт, что согласованный фильтр максимизирует отношение сигнал-помеха на выходе.
Пример 13.1. Определить передаточную АЧХ фильтра, согласованного с прямоугольным видеоимпульсом длительностью tи.
Для прямоугольного видеоимпульса ив(t) амплитудный Fв() спектр был
определен в примере 2.4 и построен на рис. 2.11. Принимая в (13.3) коэффициент пропорциональности c=1/Fв (0), получаем, что в согласованном фильтре АЧХ НСФ () совпадает с нормированным амплитудным спектром сигнала. Для физически существующих положительных частот эта характеристика изображена на рис. 13.4.
Отношение сигнал-помеха на выходе согласованного фильтра, определяемое равенством (13.5), является максимально достижимым для линейных фильтров и не зависит от формы принимаемого сигнала, а определяется его энергией. Из этого следует, что согласованным фильтром можно выделять сигналы, средняя мощность которых намного меньше средней мощности шума. Численные подтверждения дает нижеприведенный пример.
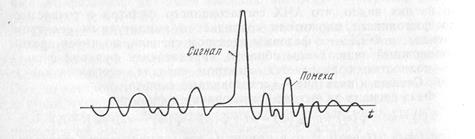
Рис.13.4 К обнаружению импульсного сигнала
Пример 13.2. Определить отношение сигнал-помеха на выходе согласованного фильтра для сложного сигнала длительностью ts =1 мс, шириной спектра
 =1 МГц, если отношение сигнал-шум на входе фильтра
=1 МГц, если отношение сигнал-шум на входе фильтра  вх =Рs /Рn =0,01.
вх =Рs /Рn =0,01.
Для вычисления вsх по (13.5) необходимо знать энергию сигнала Ws и
спектральную плотность мощности помехи N0. Из (2.26) Ws =Рs ts. При определении отношения сигнал-помеха мощность помехи обычно измеряется в полосе частот сигнала и спектральная плотность мощности N0=  (см. пример 2.7). Зная Ws и N0, определяем
(см. пример 2.7). Зная Ws и N0, определяем
 =20.
=20.
Примечание. При отношении сигнал-помеха рвых=20 прием считается уверенным.
Сигнал на выходе согласованного фильтра в предположении, что в отсутствие помех на вход фильтра подается сигнал sвх (t),по отношению к которому данный фильтр является согласованным, можно найти, например, используя интеграл Дюамеля
 (13.7)
(13.7)
Сравнив полученную формулу с (2.21), видим, что выходной сигнал с точностью до постоянного множителя совпадает с функцией автокорреляции входного сигнала, сдвинутого в сторону запаздывания на время to, т. е.

Можно считать, что согласованный фильтр эквивалентен коррелятору и сигнал на его выходе существенно отличается от входного.
Отметим сходства и отличия оптимального фильтра Колмогорова — Винера и оптимального согласованного фильтра.
1. Оба фильтра предназначены для выделения сигнала и подавления помех, оба улучшают отношение сигнал-помеха на выходе, но критерии их работы существенно, различны: фильтр Колмогорова — Винера минимизирует среднеквадратическую разность, согласованный фильтр максимизирует отношение сигнал-помеха.
2. Искажения сигнала на выходе фильтра Колмогорова — Винера минимальны, согласованный фильтр так искажает форму сигнала, чтобы в какой-то момент 4 получить его пик сигнала. Можно сказать, что согласованный фильтр максимально искажает
форму сигнала, но целенаправленно, чтобы максимально выделить его на фоне помех.
3. Согласованный фильтр может быть реализован для детермированных конечных сигналов известной формы, фильтр Колмогорова — Винера — для случайных сигналов с известной спектральной плотностью мощности.
Квазиоптимальные фильтры. Как правило, практически реализовать согласованный фильтр затруднительно, поэтому часто для обработки простых дискретных сигналов применяют фильтры более простой конструкции, но обеспечивающие отношение сигнал-помеха на выходе, близкое к максимально достижимому при согласованной фильтрации. Эти фильтры имеют заданную форму АЧХ, а для максимизации отношения сигнала к
помехе на выходе выбирается оптимальной полоса пропускания фильтра. Такие фильтры принято называть квазиоптимальными. Теорию квазиоптимальной фильтрации разработал чл.-корр. АН СССР В. И. Сифоров.
Как показывает анализ, полоса пропускания квазиоптимальных фильтров зависит от формы сигнала и вида амплитудно-частотной характеристики. Так, для прямоугольного радиоимпульса длительностью tи, оптимальная эффективная шумовая полоса пропускания Пэфф будет равна: для идеального полосового фильтра—1,37/tи; для фильтра в виде одиночного колебательного контура — 0,4/tи; для колоколообразного фильтра — 0,72/tи. Напомним, что эффективная шумовая полоса фильтра (см. $ 2.7) вычисляется по методу равновеликого прямоугольника для квадрата модуля передаточной функции фильтра.
Наличие оптимальной полосы фильтра физически объясняется следующим: с уменьшением полосы пропускания фильтра уменьшается мощность помех на выходе, но при этом будет уменьшаться и сигнал, не достигая своего установившегося значения в силу замедления переходных процессов в фильтре. При увеличении полосы пропускания, мощность шума увеличивается пропорционально полосе, а сигнал, достигший значения, близкого к установившемуся, увеличивается незначительно.
Отношение сигнал-помеха на выходе квазиоптимальных фильтров при простых сигналах,(одиночные радио- или видеоимпульсы) уменьшается по сравнению с соответствующим согласованным фильтром на величину порядка 10... 20%. Необходимо отметить, что фильтры с плавной; АЧХ дают лучшие результаты, чем идеальные фильтры, поэтому при приеме дискретных сигналов не следует стремиться к применению фильтров с крутыми скатами (близкими к идеальным).
На выбор полосы пропускания квазиоптимальных фильтров накладывают ограничение также переходные (межсимвольные) помехи, которые возникают при приеме случайной последовательности дискретных сигналов. В момент принятия решения об i -м
сигнале на вход решающего устройства поступает остаточное напряжение от предыдущих сигналов, так как переходные процессы в квазиоптимальных, фильтрах сравнительно медленные. Это остаточное напряжение и образует межсимвольные помехи.
В согласованных фильтрах межсимвольные помехи отсутствуют, поскольку их импульсный отклик и, соответственно, реакция на сигнал имеют конечную длительность и переходные процессы к моменту принятия решения о следующем сигнале оканчиваются.
Многочисленные расчеты переходных процессов в различных квазиоптимальных фильтрах показывают, что у них при оптимальной полосе пропускания межсимвольные помехи недопустимо велики, поэтому приходится выбирать полосу пропускания больше оптимальной, вследствие чего отношение сигнал-помеха на выходе фильтра может существенно уменьшаться.
При приеме дискретных сигналов в виде прямоугольных импульсов основную фильтрацию часто проводят последетекторным фильтром, который называют манипуляционным. Его полоса пропускания выбирается равной 1,4/tи на уровне затухания б дБ, т. е. примерно в 4 раза шире оптимальной полосы квазиоптимального фильтра для одиночного прямоугольного видеоимпульса.
Стробирование. Стробирование сигналов является наиболее простым методом обработки. Широко применяется.на практике, и его часто называют приемом с однократным отсчетом.
При стробировании в определенный момент, на интервале длительности сигнала ts, отсчитывается текущее значение смеси сигнала и помехи, которое затем подается в решающее устройство. Так как.статистические характеристики помех мало зависят от
выбора момента регистрации, то момент стробирования (отсчета) необходимо выбирать в момент максимального значения сигнала и минимальных его искажений за счет, переходных процессов. Это обычно середина дискретного сигнала. Если стробированию предшествует согласованный фильтр, то отсчет в момент t0 обеспечит наилучший (оптимальный) прием. При неоптимальной фильтрации до стробирования понижение помехоустойчивости значительно.
Интегральный прием. Стремление увеличить помехоустойчивость приема привело к идее принятия решения на основe не однократного, а многократного или непрерывного анализа
сигнала на интервале его длительности ts. Такой метод обработки называется интегральным и реализуется путем непрерывного интегрирования или дискретного суммирования отсчетов.,
Если на входе интегратора действует сигнал z(t) =s(t)+n(t),
то на его выходе получим величину
где первое слагаемое представляет собой сигнал, а второе — помеху на выходе интегратора. Превышение мощности сигнала над помехой на выходе интегратора
 (13.8)
(13.8)
где  — отношение сигнал-помеха и Эффективная ширина спектра помехи на входе интегратора соответственно. Интегрирование видео импульсов после детектора может быть выполнено простейшей коммутируемой RС-цепью (рис. 13.5). Постоянную
— отношение сигнал-помеха и Эффективная ширина спектра помехи на входе интегратора соответственно. Интегрирование видео импульсов после детектора может быть выполнено простейшей коммутируемой RС-цепью (рис. 13.5). Постоянную
времени этой цепи выбирают из соотношения RС  1,25 ts чтобы напряжение на емкости в конце интервала интегрирования нахо-
1,25 ts чтобы напряжение на емкости в конце интервала интегрирования нахо-
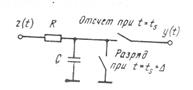 Рис..13.5 Схема простейшего коммутируемого интегратора
Рис..13.5 Схема простейшего коммутируемого интегратора
дилось в пределах линейного участка переходной характеристики. В конце каждого дискретного сигнала при t=ts отсчитывается напряжение на выходе интегратора, а при
t=ts +  емкость разряжается и тем самым подготавливается к приему следующего дискретного сигнала.
емкость разряжается и тем самым подготавливается к приему следующего дискретного сигнала.
Межсимвольные помехи при интегральном приеме отсутствуют, а сравнивая (13.8) и (13.6), видим, что отношение сигнал-помеха на выходе интегратора в 2 раза хуже, чем при обработке дискретного сигнала согласованным фильтром.
Из перечисленных выше методов обработки дискретных сигналов в реальных системах передачи дискретных сообщений нельзя отдать предпочтение каким-то одному-двум. Все зависит от вида модуляции, требуемых качественных показателей, отношения сигнал-помеха на входе приемника и т. д. Но если требуется получить максимально высокую помехоустойчивость при неблагоприятных условиях приема (например, в сверхдальних космических линиях радиосвязи), то необходимо применять согласованную фильтрацию или методы, эквивалентные ей. При невысоких требованиях к качеству или при малых помехах на входе приемника можно ограничиться и более простыми в реализации методами обработки.

