 2015-07-14
2015-07-14 20738
20738Регулирующие устройства предназначены для формирования управляющих воздействий для управления объектами.
Регулирующие устройства (регуляторы) вырабатывают управляющие воздействия для автоматического поддержания регулируемой величины технологического объекта на заданном значении или изменения её по определенной программе. Входными величинами регулятора являются действительное  и заданное
и заданное  значения регулируемой величины, а входной – регулирующее воздействие
значения регулируемой величины, а входной – регулирующее воздействие  (рис. 4.1.).
(рис. 4.1.).
 |
Рис. 4.1.: регулятор
Регуляторы вырабатывают регулирующее воздействие в соответствии с одним из типовых законов регулирования. Под законом регулирования понимают зависимость изменения величины регулятора от рассогласования  между действительным и заданным значениями регулируемой величины (
между действительным и заданным значениями регулируемой величины ( ).
).
По характеру изменения регулируемого воздействия регуляторы делят на позиционные, непрерывного действия и импульсные. Рассмотрим регуляторы позиционные и непрерывного действия.
Позиционные регуляторы (Пз-регуляторы) реализуют принцип «включено - выключено» и бывают двух- и трехпозиционными. Их статические характеристики приведены на рисунке 4.2.
 |
Рис. 4.2.: статические характеристики двухпозиционных (а) и
Трехпозиционных (б) регуляторов с зонами неоднозначности
Двухпозиционные регуляторы могут устанавливать выходную величину только на минимальном  и максимальном
и максимальном  значениях. Переход от одного из этих значений к другому совершается скачком при прохождении регулируемой величины через пороговое значение
значениях. Переход от одного из этих значений к другому совершается скачком при прохождении регулируемой величины через пороговое значение  . На рисунке 4.2. значение принято равным нулю. Однако при работе с конкретными объектами статические характеристики двухпозиционных регуляторов обычно настраивают несимметрично относительно нулевого значения. Реальные регуляторы с возрастанием входной величины срабатывают при большем пороговом значении, а при убывании входной величины-при меньшем пороговом значении. Рассогласование между этими пороговыми значениями определяют зону возврата или неоднозначности
. На рисунке 4.2. значение принято равным нулю. Однако при работе с конкретными объектами статические характеристики двухпозиционных регуляторов обычно настраивают несимметрично относительно нулевого значения. Реальные регуляторы с возрастанием входной величины срабатывают при большем пороговом значении, а при убывании входной величины-при меньшем пороговом значении. Рассогласование между этими пороговыми значениями определяют зону возврата или неоднозначности  .
.
Трехпозиционные регуляторы могут устанавливать выходную величину помимо значений и . Также и в промежуточном значении  . Регулятор срабатывает при двух пороговом значениях
. Регулятор срабатывает при двух пороговом значениях  и
и  . При прохождении регулируемой величины между этими значениями, то есть в пределах зоны нечувствительности
. При прохождении регулируемой величины между этими значениями, то есть в пределах зоны нечувствительности  , выходная величина принимает значение . При выходе из зоны
, выходная величина принимает значение . При выходе из зоны  за пороговые значения или выходная величина регулятора скачкообразно перемещается соответственно в положение и . Статические характеристики этих регуляторов также могут иметь зону возврата . В отличие от двухпозиционного регулирования в системах с трехпозиционным регулированием возможно прекращение автоколебательного процесса и достижение равновесного состояния, если соблюдается неравенство
за пороговые значения или выходная величина регулятора скачкообразно перемещается соответственно в положение и . Статические характеристики этих регуляторов также могут иметь зону возврата . В отличие от двухпозиционного регулирования в системах с трехпозиционным регулированием возможно прекращение автоколебательного процесса и достижение равновесного состояния, если соблюдается неравенство  , то есть регулируемая величина находится в пределах зоны нечувствительности регулятора.
, то есть регулируемая величина находится в пределах зоны нечувствительности регулятора.
Пз - регуляторы несложны по конструкции, надежны в работе, просты в эксплуатации и настройке. Их применяют на инерционных объектах с малым запаздыванием.
Регуляторы непрерывного действия (аналоговые регуляторы) по закону регулирования делятся на:
а) пропорциональные регуляторы (П-регуляторы);
б) интегральные регуляторы (И-регуляторы);
в) пропорционально-интегральные регуляторы (ПИ - регуляторы);
г) пропорционально-дифференциальные регуляторы (ПД - регуляторы);
д) пропорционально-интегрально-дифференциальные регуляторы (ПИД – регуляторы).
П - регуляторы. Формируют пропорциональный закон регулирования. Функция П - регуляторов имеет вид
 (4.1)
(4.1)
где  - коэффициент передачи регулятора;
- коэффициент передачи регулятора;
 - отклонение регулируемой величины от заданного значения
- отклонение регулируемой величины от заданного значения
Передаточная функция П – закона регулирования
 (4.2)
(4.2)
Переходная функция пропорционального регулятора
 (4.3)
(4.3)
График переходной характеристики (Рис. 4.3) позволяет сделать вывод, что величина регулирующего воздействия П – регулятора пропорциональна отклонению регулируемой величины от заданного значения.
 |
Рис: 4.3.: переходная характеристика П - регулятора
Коэффициент является параметром настройки пропорционального регулятора. В связи с наличием жесткой взаимосвязи между изменениями входной и выходной величин П - регулятор имеет высокое быстродействие, что при его работе в замкнутом контуре приводит к малой продолжительности переходного процесса. Вместе с тем П - регулятор в стационарных режимах работы объекта обладает статической ошибкой, которая зависит от  и . С точки зрения точности регулирования, статическая ошибка является недостатком П - закона регулирования, однако это свойство повышает устойчивость систем автоматического управления, что является положительным моментом.
и . С точки зрения точности регулирования, статическая ошибка является недостатком П - закона регулирования, однако это свойство повышает устойчивость систем автоматического управления, что является положительным моментом.
И-регуляторы. Формируют интегральный закон регулирования. Функция регулирования имеет вид
 (4.4)
(4.4)
где  - постоянная времени интегрирования - параметр настройки регулятора. Постоянная времени интегрирования И - регулятора равна времени, в течение которого с момента поступления на вход регулятора постоянного сигнала на выходе регулятора достигает значения, равного значению входного сигнала.
- постоянная времени интегрирования - параметр настройки регулятора. Постоянная времени интегрирования И - регулятора равна времени, в течение которого с момента поступления на вход регулятора постоянного сигнала на выходе регулятора достигает значения, равного значению входного сигнала.
Передаточная функция интегрального регулятора
 (4.5)
(4.5)
Переходная функция регулятора  .
.
Переходная характеристика И - регулятора с передаточной функцией (4.5) представлена на рис. 4.4.
 |
Рисунок 4.4.: переходная характеристика И - регулятора
Рассмотрим физический смысл постоянной времени интегрирования . Предположим, что на вход регулятора (рис. 4.4.) поступил постоянный сигнал  . При этом выходной сигнал в соответствии (4.4) будет меняться по закону
. При этом выходной сигнал в соответствии (4.4) будет меняться по закону
 (4.6)
(4.6)
По истечении времени  значение выходного сигнала будет равно
значение выходного сигнала будет равно  .
.
Величина регулирующего воздействия И - регулятора пропорциональна интегралу от отклонения регулируемой величины. Система автоматического управления с И-регулятором не имеет статической ошибки, так как при отклонении регулируемой величины от заданного значения регулятор перемещает регулирующий орган до тех пор, пока регулируемая величина на достигнет вновь заданного значения.
Недостатком И-регулятора является то, что на объектах со значительным запаздыванием появляются колебательные процессы при регулировании технологического параметра.
Основное назначение И-регулирования - ликвидация установившейся ошибки регулирования.
В качестве самостоятельных И - регуляторы применяются редко из-за медленного нарастания регулирующего воздействия на объект при отклонении регулируемой величины.
Очень часто закон И - регулирования формируется не самостоятельным регуляторам, а блоком или устройством, конструктивно являющимся составной частью регулятора, реализующего более сложный, например, пропорционально - интегральный закон регулирования.
ПИ-регуляторы. Реализуют пропорционально-интегральный закон регулирования. Закон Пи - регулирования Пи-регулятора имеет вид
 (4.7)
(4.7)
где  - постоянная времени интегрирования;
- постоянная времени интегрирования;
- коэффициент передачи регулятора.
Время интегрирования и коэффициент передачи являются параметрами настройки ПИ-регулятора.
Передаточная функция пропорционально-интегрального регулятора
 (4.8)
(4.8)
Переходная функция регулятора
Переходная характеристика ПИ-регулятора с передаточной функцией (4.8) представлена на рисунке 4.5.
 |
Рис. 4.5.: переходная характеристика ПИ - регулятора
Пропорционально-интегральный регулятор оказывает воздействие на регулирующий орган пропорционально отклонению и интегралу от отклонения регулируемой величины.
Система автоматического управления с ПИ-регулятором не имеют статической ошибки регулируемой величины из-за наличия интегрирующей составляющей и обладают повышенной устойчивостью из-за наличия пропорциональной составляющей.
В замкнутом контуре при отклонении регулируемого параметра от заданного значения пропорциональная составляющая ПИ-регуляторе уменьшает скорость этого отклонения, а затем интегральная составляющая продолжает воздействовать на объект до возвращения регулируемой величины к заданному значению, то есть до ликвидации рассогласования . Таким образом, ПИ-регулятор по сравнению с П-регулятором после окончания переходного процесса не дает остаточного отклонения регулируемой величины и поддерживает её на заданном значении при изменении нагрузки объекта или других возмущениях. При этом выходная величина регулятора принимает соответствующее значение. Следовательно, в ПИ-регуляторе при отклонении регулируемой величины от заданного значения, в начале срабатывает пропорциональная (статическая) часть регулятора, а затем воздействие на объект постепенно увеличивается под действием интегральной (астатической) части регулятора. Пи - регуляторы с законом регулирования (4.7) имеют независимые друг от друга параметры настройки и . На практике также применяют ПИ-регуляторы с законом регулирования
 4.9
4.9
где  - время изодрома регулятора – время, в течение которого при ступенчатом рассогласовании изменение выходной величины регулятора под воздействием интегральной составляющей достигает предварительного изменения выходной величины регулятора под действием пропорциональной составляющей.
- время изодрома регулятора – время, в течение которого при ступенчатом рассогласовании изменение выходной величины регулятора под воздействием интегральной составляющей достигает предварительного изменения выходной величины регулятора под действием пропорциональной составляющей.
Коэффициент передачи регулятора и время изодрома  являются параметрами настройки ПИ-регулятора.
являются параметрами настройки ПИ-регулятора.
Регуляторы с законом регулирования (4.9) называются изодромными. Они имеют зависимые параметры настройки. Изменение коэффициента приводит также к изменению времени интегрирования, равного

Если при настройке ПИ-регулятора установить  , то получим П-регулятор.
, то получим П-регулятор.
Если при настройке регулятора установить очень малые значения , получим И-регулятор.
Органы настройки пропорциональной составляющей промышленных регуляторов градируются в единицах коэффициента передачи или предела пропорциональности  , выражаемого в процентах и определяемого по равенству (в %)
, выражаемого в процентах и определяемого по равенству (в %)
 (4.10)
(4.10)
интегральной составляющей – в значениях (или ). Время интегрирования настраивается в диапазоне от 0,05 мин до µ (100 мин), коэффициент передачи в диапазоне от 0,03 до 50, а предел пропорциональности настраивается в диапазоне от 2 до 3000 %.
ПД-регуляторы. Формируют пропорционально-дифференциальный закон регулирования. Закон регулирования ПД-регулятора имеет вид
 (4.11)
(4.11)
где  - постоянная времени дифференцирования;
- постоянная времени дифференцирования;
- коэффициент передачи регулятора.
Время дифференцирования  , изменяемое в диапазоне от 0,05 мин до 10 мин, и коэффициент передачи , изменяемый в диапазоне от 0,03 до 50, являются параметрами настройки регулятора.
, изменяемое в диапазоне от 0,05 мин до 10 мин, и коэффициент передачи , изменяемый в диапазоне от 0,03 до 50, являются параметрами настройки регулятора.
Передаточная функция пропорционально-дифференциального ре-гулятора
 (4.12)
(4.12)
Переходная функция регулятора
 (4.13)
(4.13)
где  -дельта-функция.
-дельта-функция.
Физическая дельта-функция представляет импульс бесконечно большой амплитуды и бесконечно малой длительности.
Переходная характеристика ПД-регулятора с передаточной функцией (4.12) представлена на рис. 4.6.
  |
Рис. 4.6.:переходная характеристика ПД – регулятора.
Пропорционально-дифференциальный регулятор (ПД-регулятор) оказывает воздействие на объект регулирования пропорционально отклонению регулируемой величины и производной от величины отклонения, т. е. ее скорости изменения.
В системе автоматического управления с ПД-регулятором в начальный момент действия возмущения скорость отклонения регулируемой величины влияет более значительно на регулирующий орган, чем само отклонение. Поэтому использование в качестве дополнительной информации скорость отклонения регулируемой величины позволяет осуществить предваряющее регулирующее воздействие, улучшая качество регулирования, т. е. сокращает время переходного процесса и уменьшает амплитуду колебаний регулируемой величины.
При поступлении на вход идеального ПД-регулятора постоянного сигнала  на выходе (рис. 4.6) мгновенно появляется бесконечно большой сигнал от дифференцирующей составляющей закона ПД-регулирования (4.11) и сигнал от пропорциональной составляющей
на выходе (рис. 4.6) мгновенно появляется бесконечно большой сигнал от дифференцирующей составляющей закона ПД-регулирования (4.11) и сигнал от пропорциональной составляющей  .
.
Сигнал от дифференцирующей составляющей сразу падает до нуля, от пропорциональной составляющей остается постоянным и равным первоначальному: .
Пропорционально-дифференциальный регулятор применяется на объектах, где регулируемая величина имеет свойство быстро отклоняться от заданного значения и необходима реакция на скорость ее отклонения.
ПД-регулятор вырабатывает регулирующее воздействие, пропорциональное скорости отклонения регулируемой величины от заданного значения:
 (4.14)
(4.14)
В результате этого воздействия отклонения регулируемой величины будут менее значительными.
Таким образом, при большой скорости отклонения регулируемой величины, ПД-регулятор оказывает существенное регулирующее воздействие на объект, ликвидируя тем самым ожидаемое отклонение регулируемой величины, причем чем больше возмущающее воздействие на объект, тем быстрее будет отклоняться регулируемая величина от заданного значения и тем значительнее будет регулирующее воздействие регулятора (4.14) на объект, направленное на нейтрализацию возмущающего воздействия.
Пропорционально-дифференциальные регуляторы, также как и ПИ-ре-гуляторы, могут иметь структурную схему с общим коэффициентом усиления .
В этом случае закон ПД – регулирования запишется в виде
 (4.15)
(4.15)
Постоянная времени  называется постоянной времени предварения.
называется постоянной времени предварения.
Передаточная функция регулятора имеет вид
 (4.16)
(4.16)
ПИД-регуляторы. Формируют пропорционально-интегрально-дифференциальный закон регулирования. Закон регулирования ПИД – регулятора имеет вид
 (4.17)
(4.17)
где - коэффициент передачи регулятора,
- постоянная времени интегрирования,
- постоянная времени дифференцирования.
Величины , , являются параметрами настройки ПИД-регулятора.
Передаточная функция ПИД-регулятора имеет вид
 (4.18)
(4.18)
Переходная функция регулятора
 (4.19)
(4.19)
Переходная характеристика ПИД-регулятора с передаточной функцией (4.18) представлена на рис. 4.7.
Пропорционально-интегрально-дифференциальный регулятор (4.17) воздействует на объект регулирования пропорционально отклонению регулируемой величины, интегралу от этого отклонения и скорости изменения регулируемой величины.
 |
Рис. 4.7.: переходная характеристика ПИД-регулятора
При скачкообразном изменении регулируемой величины идеальный ПИД-регулятор в начальный момент времени оказывает мгновенное бесконечно большое воздействие на объект регулирования; затем величина воздействия мгновенно падает до значения, определяемого пропорциональной частью регулятора, после чего, как и в ПИ-регуляторе, постепенно начинает оказывать свое влияние интегральная (астатическая) часть регулятора (рис. 4.7).
При плавном изменении регулируемой величины выход ПИД-регулятора по сравнению с выходом ПИ-регулятора изменяется с некоторым опережением, пропорциональным скорости  .
.
С уменьшением этой скорости опережающее воздействие уменьшается и полностью исчезает при равновесном состоянии. Воздействие по производной ПИД-регулятора можно представить как временное усиление влияния регулятора на объект при возрастании  и наоборот. В замкнутом контуре ПИД-регулирование по сравнению с ПИ-регулированием приводит к уменьшению скорости отклонения
и наоборот. В замкнутом контуре ПИД-регулирование по сравнению с ПИ-регулированием приводит к уменьшению скорости отклонения  и, как следствие этого, к повышению качества регулирования.
и, как следствие этого, к повышению качества регулирования.
Этот регулятор применяют для САУ, где ввод по производной желателен и статическая ошибка недопустима.
Закон регулирования ПИД-регулятора с зависимыми параметрами настройки имеет вид
 (4.20)
(4.20)
где  - время предварения - параметр настройки регулятора.
- время предварения - параметр настройки регулятора.
ПИД-регуляторы, по сравнению с другими, являются наиболее универсальными. Используя их, можно получить различные законы регулирования. Установив  , получим ПИ-регулятор, а установив
, получим ПИ-регулятор, а установив  и , получим П-регулятор.
и , получим П-регулятор.
В системах автоматического управления и регулирования получили распространение регуляторы, устройства и вторичные приборы комплекса "Старт". Данный комплекс собирают из элементов "Универсальной системы элементов промышленной пневмоавтоматики (УСЭППА)".
Регуляторы и устройства комплекса имеют блочную конструкцию. Элементы УСЭППА монтируют в блоках на коммуникационных платах при помощи винтов или соединительных трубок. Связь между элементами осуществляется через каналы в платах. Элементы подсоединены к выходным штуцерам регуляторов и устройств гибкими трубками.
Регуляторы могут настраиваться на прямое и обратное действие. Увеличение входной величины  регулятора прямого действия вызывает возрастание его выходной величины
регулятора прямого действия вызывает возрастание его выходной величины  , а регулятора обратного действия - уменьшение . Предел допускаемой основной погрешности регуляторов и функциональных устройств выражают в процентах от нормирующего значения стандартного сигнала, равного 80 кПа.
, а регулятора обратного действия - уменьшение . Предел допускаемой основной погрешности регуляторов и функциональных устройств выражают в процентах от нормирующего значения стандартного сигнала, равного 80 кПа.
Рассмотрим пневматический пропорционально-интегральный регуля-тор ПР3.31.
Регулятор ПР3.31 предназначен для реализации ПИ-закона регулирования (рис.4.8).
Входной сигнал и заданное давление  подводятся в камеры В и Б пятимембранного элемента сравнения (1). Его выходной сигнал
подводятся в камеры В и Б пятимембранного элемента сравнения (1). Его выходной сигнал  направляется в камеру Г, образуя единичную отрицательную обратную связь, а также через выключающее реле (3) и инерционный (2) - в камеру Д, формируя инерционную положительную обратную связь. Сигнал
направляется в камеру Г, образуя единичную отрицательную обратную связь, а также через выключающее реле (3) и инерционный (2) - в камеру Д, формируя инерционную положительную обратную связь. Сигнал  выхода инерционного элемента (2) подводится к маломощному повторителю давления (4), сигнал с выхода которого
выхода инерционного элемента (2) подводится к маломощному повторителю давления (4), сигнал с выхода которого  подается на дроссельные сумматоры (5) и (6). На сумматор 5 поступает также сигнал , а на сумматор (6) - сигнал
подается на дроссельные сумматоры (5) и (6). На сумматор 5 поступает также сигнал , а на сумматор (6) - сигнал  выхода трехмембранного элемента сравнения (7), который далее направляется через постоянный дроссель во входную камеру Д повторителя-усилителя мощности (8). На его выходе формируется выходное давление регулятора
выхода трехмембранного элемента сравнения (7), который далее направляется через постоянный дроссель во входную камеру Д повторителя-усилителя мощности (8). На его выходе формируется выходное давление регулятора  , которое проходит через выключающее реле (9) и поступает в выходную линию регулятора.
, которое проходит через выключающее реле (9) и поступает в выходную линию регулятора.
Если  , то мембранные узлы элементов 1, 4, 7 и 8 находятся в равновесии, и давление на выходе регулятора не изменяется. Повышение давления относительно давления
, то мембранные узлы элементов 1, 4, 7 и 8 находятся в равновесии, и давление на выходе регулятора не изменяется. Повышение давления относительно давления  приводит к увеличению сигнала , а после прохождения инерционного элемента (2) также и сигнала . Причем сигнал возрастает более интенсивно, чем сигнал , что вызывает поток воздуха через дроссели сумматора (5) в направлении стрелки, показанной на рисунке. При этом давление
приводит к увеличению сигнала , а после прохождения инерционного элемента (2) также и сигнала . Причем сигнал возрастает более интенсивно, чем сигнал , что вызывает поток воздуха через дроссели сумматора (5) в направлении стрелки, показанной на рисунке. При этом давление  в камере В элемента (7) возрастает, его мембранный блок перемещается вниз, закрывая торцом штока мембран сопло в камере А. В результате этого давление повышается и через дроссели сумматора 6 воздух начинает проходить в направлении, показанном стрелкой, и давление
в камере В элемента (7) возрастает, его мембранный блок перемещается вниз, закрывая торцом штока мембран сопло в камере А. В результате этого давление повышается и через дроссели сумматора 6 воздух начинает проходить в направлении, показанном стрелкой, и давление  в камере Б элемента сравнения (7) также начинает возрастать. Давление продолжает повышаться до тех пор, пока давление не станет равным давлению . Увеличение давления в линии входа повторителя (8) вызывает такое же увеличение давления на его выходе и выходе регулятора. Уменьшение давления на входе регулятора сопровождается уменьшением давления на его выходе.
в камере Б элемента сравнения (7) также начинает возрастать. Давление продолжает повышаться до тех пор, пока давление не станет равным давлению . Увеличение давления в линии входа повторителя (8) вызывает такое же увеличение давления на его выходе и выходе регулятора. Уменьшение давления на входе регулятора сопровождается уменьшением давления на его выходе.
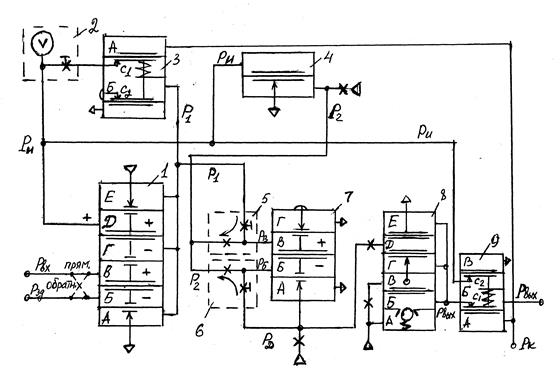
Рис.4.8.: принципиальная схема регулятора ПР3.31

Рисунок 4.9.: принципиальная схема стендовой проверки
Уравнение динамики регулятора ПР3.31 имеет вид
 (4.21)
(4.21)
где  - коэффициент передачи пропорциональной составляющей регулятора;
- коэффициент передачи пропорциональной составляющей регулятора;
 - время интегрирования.
- время интегрирования.
Это уравнение подтверждает, что регулятор ПР3.31 является ПИ - регулятором с независимыми параметрами настройки.
Выключающее реле (3) и (9) необходимы для отключения и включения регулятора при переходе с автоматического на ручное управление и, наоборот. При автоматическом регулировании командный сигнал  и выходной сигнал регулятора через сопло
и выходной сигнал регулятора через сопло  (реле 9) проходит на выход регулятора, а сигнал с выхода элемента (1) через сопло (реле 3) - на вход инерционного элемента (2). Для перехода на ручное управление в выключающее реле подается сигнал
(реле 9) проходит на выход регулятора, а сигнал с выхода элемента (1) через сопло (реле 3) - на вход инерционного элемента (2). Для перехода на ручное управление в выключающее реле подается сигнал  . В этом случае закрывается сопло обоих реле, и сигнал разъединяется с линией выхода регулятора, а также прерывается линия инерционной положительной обратной связи, проходящая через реле (3). Но при этом выход реле (9) через открытое сопло
. В этом случае закрывается сопло обоих реле, и сигнал разъединяется с линией выхода регулятора, а также прерывается линия инерционной положительной обратной связи, проходящая через реле (3). Но при этом выход реле (9) через открытое сопло  соединяется с камерой Д элемента сравнения (1) - камерой положительной обратной связи, в которой устанавливается давление, равное давлению в линии выхода регулятора. Это предохраняет линию выхода от скачка давления при промежуточном положении переключателя станции управления и обеспечивает в последующем плавный переход с ручного управления на автоматическое.
соединяется с камерой Д элемента сравнения (1) - камерой положительной обратной связи, в которой устанавливается давление, равное давлению в линии выхода регулятора. Это предохраняет линию выхода от скачка давления при промежуточном положении переключателя станции управления и обеспечивает в последующем плавный переход с ручного управления на автоматическое.
Для ослабления влияния автоколебаний, возникающих в замкнутом контуре сумматор (6) - камера Б элемента (7) - линия обратной связи сигнала  - сумматор6, на работу повторителя (8) на линии сигнала устанавливают постоянный дроссель.
- сумматор6, на работу повторителя (8) на линии сигнала устанавливают постоянный дроссель.
Предел пропорциональности  регулятора ПР3.31 настраивается в диапазоне от 2 % до 3000 % (коэффициент передачи К от 0,03 до 50) при помощи регулируемых дросселей сумматоров (5) и (6). При настройке в диапазоне 100-3000% дроссель сумматора 6 устанавливают на отметку 100%, что соответствует полному открытию (при
регулятора ПР3.31 настраивается в диапазоне от 2 % до 3000 % (коэффициент передачи К от 0,03 до 50) при помощи регулируемых дросселей сумматоров (5) и (6). При настройке в диапазоне 100-3000% дроссель сумматора 6 устанавливают на отметку 100%, что соответствует полному открытию (при  ), а дроссель сумматора 5 - на соответствующую отметку по шкале. В этом случае регулятор реализует закон
), а дроссель сумматора 5 - на соответствующую отметку по шкале. В этом случае регулятор реализует закон
 .
.
При полном открытии дросселя сумматора 5 величина равна  . По мере закрытия этого дросселя значение возрастает.
. По мере закрытия этого дросселя значение возрастает.
При настройке в диапазоне от 2 до 100% дроссель сумматора (5) устанавливают на отметку 100 %, что соответствует его полному открытию (при этом  ), а дроссель сумматора (6) - на соответствующую отметку по шкале. В таком случае регулятор осуществляет закон
), а дроссель сумматора (6) - на соответствующую отметку по шкале. В таком случае регулятор осуществляет закон
 .
.
Полному открытию дросселя сумматора (6) соответствует значение  . При закрытии дросселя значение уменьшается.
. При закрытии дросселя значение уменьшается.
Время интегрирования настраивается дросселем, входящим в состав инерционного элемента (2). При закрытом дросселе (при его установке на отметку шкалы  ) принимает максимальное значение, равное 100 мин. При этом воздействие И-составляющей сводится к минимуму, и регулятор осуществляет П-закон регулирования. По мере открытия дросселя время уменьшается, а воздействие И-составляющей усиливается.
) принимает максимальное значение, равное 100 мин. При этом воздействие И-составляющей сводится к минимуму, и регулятор осуществляет П-закон регулирования. По мере открытия дросселя время уменьшается, а воздействие И-составляющей усиливается.
При полностью открытом дросселе 
Основная погрешность регулятора ПР3.31 составляет  .
.
Для целей автоматического регулирования введена в практику регулирующие устройства, формирующие закон регулирования, пропорциональный скорости отклонения регулируемой величины  , и тем самым реализуют предваряющее воздействие на отклонение. В качестве таких устройств используют дифференциаторы (Д-регулирующие устройства).
, и тем самым реализуют предваряющее воздействие на отклонение. В качестве таких устройств используют дифференциаторы (Д-регулирующие устройства).
Для практической реализации закона ПД-регулирования или ПИД-ре-гулирования применяются соответственно П-регуляторы или ПИ-регуляторы в комплекте с дифференциаторами. Рассмотрим пневматическое устройство прямого предварения ПФ2.1.
Устройство прямого предварения ПФ 2.1 (рис.4.10) формирует на выходе сигнал, пропорциональный входной величине и скорости ее изменения. Входной сигнал поступает в камеру В трехмембранного элемента сравнения 1. Его выходной сигнал , образующиеся в линии между постоянным дросселем и соплом в камере А, через инерционный элемент 2, состоящий из регулируемого дросселя и пневмокамеры, направляется по отрицательной обратной связи в камеру Б элемента сравнения 1, а также на вход повторителя 4. Сигнал на выходе последнего есть выходной сигнал устрой-ства .
При постоянном сигнале блок мембран элемента 1 находится в равновесии  , поток воздуха через дроссель элемента (2) отсутствует, и перепад давления на нем равен нулю, т.е.
, поток воздуха через дроссель элемента (2) отсутствует, и перепад давления на нем равен нулю, т.е.  . Давление , усиленное по мощности, есть выходной сигнал устройства . Следовательно, при
. Давление , усиленное по мощности, есть выходной сигнал устройства . Следовательно, при  выходной сигнал устройства
выходной сигнал устройства  .
.
При повышении входного сигнала мембранный блок элемента 1 опускается, сопло в камере А прикрывается, что приводит к увеличению сопротивления пневмоконтакта сопло - заслонка и возрастанию давления . Последствием возникшего перепада давления воздух начинает протекать через дроссель элемента (2) и постепенно заполнять пневмокамеру. В результате этого давление воздуха в пневмокамере и в камере Б элемента 1 начинает возрастать, но с некоторым отставанием относительно давления . Давление и выходной сигнал устройства будут увеличиваться с опережением во времени по сравнению и изменением давления . При понижении выходной уменьшается, но также с опережением.
Уравнение динамики устройства ПФ 2.1 имеет вид
 (4.22)
(4.22)
где  - время дифференцирования.
- время дифференцирования.
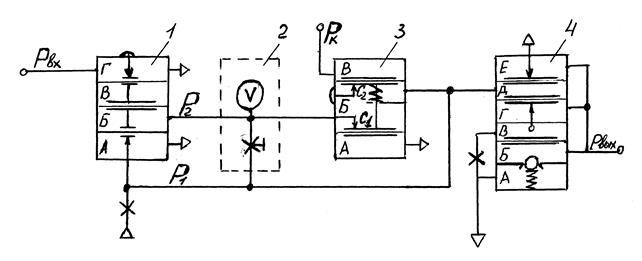
Рис. 4.10.: устройство прямого предварения ПФ 2.1
Выключающее реле (3) предназначено для перевода устройства в режим работы повторителя входного сигнала при подаче командного сигнала  . При
. При  сопло реле (3) открывается и сигнал
сопло реле (3) открывается и сигнал  с выхода элемента (1) проходит в его камеру отрицательной обратной связи через реле 3, минуя дроссель элемента 2. В результате на выходе устройства отслеживается давление, равное входному.
с выхода элемента (1) проходит в его камеру отрицательной обратной связи через реле 3, минуя дроссель элемента 2. В результате на выходе устройства отслеживается давление, равное входному.
Параметром настройки устройства является время дифференцирования , изменяемое в диапазоне от  до
до  с помощью регулируемого дросселя элемента (2).
с помощью регулируемого дросселя элемента (2).
Предел допустимой основной погрешности устройства ПФ 2.1 не превышает  .
.
Пневматические регуляторы применяют при автоматизации технологических процессов в составе локальных систем, т.к они взрыво– и пожаробезопасны, легко компонуются с пневматическими измерительными преобразователями и исполнительными устройствами, обладают высокой надежностью, просты в обслуживании и наладке. Однако обычно их применяют, когда расстояние от объекта до помещения не превышает  ; в противном случае, вследствие ограниченной скорости распространения сигнала по пневмолиниям, их быстродействие может оказаться недостаточным. Для своей работы они требуют сухого, очищенного от пыли и масла воздуха, давлением
; в противном случае, вследствие ограниченной скорости распространения сигнала по пневмолиниям, их быстродействие может оказаться недостаточным. Для своей работы они требуют сухого, очищенного от пыли и масла воздуха, давлением  .
.

