2015-05-30
2015-05-30 2168
2168Акустический уровнемер опускается в измеряемую жидкость и закрепляется. Затем с помощью ультразвукового измерительного элемента подается ультразвуковой сигнал по акустическому волноводу, который, частично отразившись от торца волновода, проходит в виде продольной волны в жидкость, где он поступает на отражатель, на котором ультразвуковой сигнал отражается от полированных поверхностей под углом, равным или меньшим 60о, т. е. меньшим второго критического угла, при котором по законам преломления акустические волны полностью отражаются, проходят в жидкости и достигают поверхности, от которой они вновь отpажаются и в обратном порядке достигают ультразвукового измерительного элемента, а далее поступают в виде электрических сигналов в отсчетно-регистрирующий блок, где производятся измерения, позволяющие определять положение уровня. Наклоны боковых пластин под углами 60о к горизонтальной выбраны из условия обеспечения преломления акустических волн менее второго критического угла, что обеспечивает по закону преломления полное отражение, без потерь акустической энергии. Акустический уровнемер состоит из трубы со стержневым волноводом и акустическим измерительным элементом, соединенным с отсчетно-регистрирующим блоком, причем к нижней части трубы присоединен отражатель трапецеидальной формы, преимущественно из нержавеющей стали с полированной внутренней поверхностью. Виды акустических уровнемеров: локационные уровнемер, уровнемер поглощения, резонансный уровнемер. Все они реализуют различные физические явления, связанные с распространением звука в упругой (жидкостной или газовой) среде. Локационные уровнемеры реализуют эффект отражения звуковой волны от поверхности раздела сред. Генератор излучает в жидкость пачку импульсов высокой (ультразвуковой) частоты. Отраженный от границы раздела жидкость—газ сигнал улавливается приемником ультразвуковых колебаний. Время между моментом посылки зондирующего импульса и моментом прихода отраженного от уровня импульса связано с текущим значением уровня. Уровнемер поглощения принцип его действия основан на явлении рассеивания (поглощения) звуковой энергии в веществе. Резонансный уровнемер принцип его действия заключается в возбуждении колебаний столба газа над уровнем жидкости и в фиксации резонансной частоты, при которой наблюдается возникновение стоячей волны.
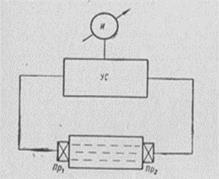
Принцип действия ультразвукового уровнемера основан на измерении времени прохождения волной расстояния от датчика и до уровня жидкости. Именно на границе жидкость-газ или газ-сыпучие материалы происходит отражение волны. Для излучения колебаний и приема их применяется, как правило, одни датчик. Расстояние рассчитывается довольно просто, достаточно умножить время прохождения колебания на скорость распространения колебаний в среде. Чаще всего средой распространения ультразвукового импульса является воздух. Скорость распространения колебаний в воздухе равна 331 м/с. Однако нужно учитывать, что это скорость при 0 градусов Цельсия, а при повышении температуры следует учитывать поправку в 0.17% на каждый градус. Именно с этой целью в готовое устройство встраивают температурные датчики. Схема такого ультразвукового сигнализатора уровня приведена на рис. Модулятор подает синусоидальное напряжение частотой 50 гц на вход генератора незатухающих (модулированных по частоте) колебаний ЧМГ. Средняя частота генератора 5,5 кгц, колебания модулируются по частоте с девиацией около + 20 гц. Генератор питает обмотку излучающего стержня датчика, вмонтированного в крышку аппарата А. Стержень выполнен из нержавеющей стали, т. е. из того же материала, что и сам ультразвуковой уровнемер. Передающий и приемный стержни настроены на частоту колебаний, излучаемых генератором, и закреплены в крышке аппарата по своей средней линии. На верхних частях стержней расположены обмотки, помещенные в магнитном поле постоянных магнитов, образующие электродинамическую преобразовательную систему. Такая конструкция датчика обеспечивает необходимую надежность и полную герметизацию объема сигнализатора уровня или уровнемера от внешней среды. Внешний вид датчика изображен на рис., а на рис. 2 показана его схема. Звуковые колебания, излучаемые торцом передающего стержня, проходят до поверхности жидкости, отражаются и, возвратившись к датчику, возбуждают колебания приемного стержня.
Сигнал на приемном стержне отличается от сигнала на передающем стержне (в один и тот же момент времени) по фазе модулирующего напряжения. Отставание по фазе пропорционально времени прохождения сигнала от датчика до поверхности жидкости и обратно. В ультразвуковом уровнемере с обмотки приемного стержня сигнал поступает на вход усилителя У, затем - на дискриминатор Д, где выделяется модулирующее напряжение. С модулятора М напряжение подается также и на фазосдвигающую цепочку, обеспечивающую плавное изменение фазы напряжения. Сигналы с дискриминатора и фазосдвигающей цепочки подаются на фазочувствительный детектор, а с него на усилитель У, питающий управляющую обмотку реверсивного двигателя РД. Ротор реверсивного двигателя ультразвукового уровнемера связан с движком реохорда фазосдвигающей цепочки. При наличии разницы фаз сигналов на входе фазового детектора реверсивный двигатель получает сигнал, обеспечивающий его вращение в сторону баланса, т. е. такого положения движка реохорда фазовращающей цепочки, при котором подаваемые на вход фазового детектора сигналы равны по фазе. Движок реохорда кинематически связан с отсчетным устройством прибора (шкалой или стрелкой), а его положение соответствует определенному фазовому сдвигу, т. е. определенному значению высоты уровня жидкости в аппарате. Погрешность такого сигнализатора уровня будет определяться степенью изменения скорости звука в газе над поверхностью аппарата. Это изменение может быть обусловлено изменением температуры газа, его состава и в несколько меньшей степени - давления. В случае, когда требуется высокая точность измерений и скорость звука меняется в широких пределах, приходится усложнять схему ультразвукового сигнализатора уровня, вводя два канала измерения: один - до поверхности жидкости, как обычно, а другой - до специально отражающей площадки (репера), находящейся на известном расстоянии от датчика. Второй канал дает возможность определить коэффициент, на который надо умножить показания основного канала, чтобы получить истинное значение уровня. В случае, когда состав газов остается постоянным, а меняется только температура, возможно создание термокомпенсации путем введения сигнала, пропорционального изменению температуры, в цепь питания реверсивного двигателя.