 2015-06-16
2015-06-16 354
354Другое дело в мировом космическом пространстве или пространстве микромира. Поскольку структура этих пространств одинакова и отличается только количественной величиной динамической плотности пространственных областей, и в космосе и в молекулах переход изодной плотности пространства (одной мерности) в другую плотность (другую мерность) должен сопровождаться качественным скачком с явной или неявной границей, отграничивающей одно пространство от другого. Наличие такой границы фиксируется и в космосе (например, центральная прозрачная область Галактики, как известно, плотное вещество), и на поверхности Земли (переход от качественно отличающегося по плотности космического пространства к пространству глубин Земли имеет своей границей поверхность последней), и в микромире. Так, постоянная тонкой структуры α = 137, вероятно, сигнализирует о такой границе вструктуре атома, так же как и величина 1836, которую мы принимаем за отношение массы протона к массе электрона.
2. Введение в основы
русской геометрии
2.1. Динамика аксиомы о параллельных
Прежде чем очень кратко познакомиться с основами русской (динамической) геометрии вспомним весьма важное для ее понимания понятие «бесконечность». Она качественно мыслится в пространстве как бесконечность наружу или «вширь» (в смысле отсутствия внешних границ) и как бесконечность вглубь (в смысле бесконечной делимости). В свою очередь качественная бесконечность имеет две градации: одна — как движение, нескончаемый процесс, постоянное становление (потенциальная бесконечность), другая — как нечто данное, имеющееся, наличное бытие (актуальная не кантовская бесконечность).
Именно использование понятия "бесконечность" в основаниях геометрии определяет ее структуру [35]. Так, опора на актуальную бесконечность предполагает существование трехмерного не качественного метрического пространства, заполненного неподвижной (статической) изотропной материей, структурированной по иерархии равнозначных бесконечностей, при полном отсутствии движения и, следовательно, времени. Все геометрии, и в первую очередь геометрия Евклида, построены с использованием свойств актуальной бесконечности и потому являются геометриями статическими.
Потенциальная бесконечность предполагает материальность (телесность) безграничного пространства и его всеобщее бесконечное самодвижение (динамику), а вместе с ним и время, и все физические свойства. Поэтому первичные понятия геометрии, построенной на свойствах потенциальной анизотропной бесконечности, отличаются от первичных понятий актуальной геометрии не только движением, но и взаимосвязью свойств (фигур), т.е. структурой. Геометрии, отражающей потенциальную бесконечность, еще не построено, но можно отметить, что она будет качественно отличаться от статических геометрий, нагляднее отображать явления природы, а, следовательно, и точнее описывать их. К тому же «замораживание» движения элементов динамической геометрии в определенном порядке обусловливает возможность построения любой статической геометрии, и, следовательно, все они оказываются производными от нее. А теперь обратимся к аксиоме о параллельных Евклида.
В Евклидовой геометрии, созданной в III в. до н.э., на основе незначительного количества априорных аксиом выводятся все ее теоремы. Однако пятая аксиома ¾ аксиома о параллельных — по содержанию больше напоминает теорему. Но многочисленные попытки представить ее в виде теоремы оказались неудачными. До нашего времени она дошла в следующей формулировке:
«Через точку, лежащую на плоскости вне прямой, можно провести одну и только одну прямую, параллельную данной».
В этой формулировке постулируется несколько положений, нарушающих условия статичности:
• геометрия Евклида статична, а в формулировку заложено движение (динамика), к тому же в неявной форме ¾ на бесконечности;
• предлагается движение в одном направлении, что не гарантирует пересечения прямых в другом направлении;
• условия движения на бесконечности не определены, а потому возможно движение без взаимодействия с пространством или во взаимодействии с ним. В последнем случае взаимодействие будет проявляться в искривлении линии (геометрии Лобачевского и Римана);
• постулируется, и тоже неявно, возможность длительного движения прямой, которое возможно только во времени. Статическая же геометрия времени не содержит.
Таким образом, аксиома о параллельных сформулирована неопределенно и потому может иметь несколько дефиниций. И действительно в XIX в. сначала Лобачевский, а затем Риман предложили еще две формулировки аксиомы о параллельных. Лобачевский предположил, что:
«Через точку на плоскости, лежащую вне прямой, можно провести бесконечное множество прямых, параллельных первой».
И построил на этой основе логически непротиворечивую геометрию отрицательной кривизны. Геометрия положительной кривизны сформулирована Риманом как отрицание постулата Лобачевского:
«Через точку на плоскости, лежащую вне прямой, невозможно провести ни одной прямой, параллельной первой».
И на этой основе была построена логически непротиворечивая сферическая (?? – А.Ф.) геометрия.
Итак, мы имеем три двойственных формулировки аксиомы о параллельных: Евклида, Лобачевского и Римана. Все они базируются на использовании как свойств актуальной, так и потенциальной бесконечности [36]. Возникает вопрос: можно ли сформулировать аксиому о параллельных на основе только свойств потенциальной бесконечности?
Отметим еще раз, что основное свойство потенциальной бесконечности ¾ движение, которое остается незавершенным на бесконечности. Воспользовавшись этим свойством, сформулируем динамическую аксиому о параллельных:
Прямые — следы точек, движущихся к единому центру и не достигающих этого центра за бесконечный промежуток времени, ¾ параллельны.
В этой аксиоме предполагается, что следы ¾ прямые, образуемые движущимися точками, совместно стремятся к единому центру, который может находиться в любой точке пространства, но оставаться недостижимым, поскольку свойства напряженности пространства изменяются и своим изменением замедляют их движение (вспомните температурную сферу А. Пуанкаре). Каждый последующий шаг для них оказывается меньше предыдущего, и поэтому расстояние до центра О не может быть пройдено даже за бесконечный промежуток времени. То есть эти движущиеся прямые никогда не пересекутся и, следовательно, они параллельны. Геометрия, основанная на данной аксиоме, названа русской геометрией, хотя является динамической или физической геометрией.
В предыдущем предложении подчёркнуто слово аксиома. И подчёркнуто не случайно. Выше утверждается категорически, что русская механика не содержит аксиом. И вдруг автор от категоричности отказывается. Не отказываюсь, а только стремлюсь показать, что аксиомы подменяют сущность физических явлений их наблюдаемым эффектом. Так, например, наблюдается, что «отношение кубов больших полуосей орбит к квадратам времён обращения для всех планет Солнечной системы одинаково (третий закон Кеплера):
4 π2R3/T2 = MG = const.
Правильнее:
Ѕ3/Т2 = const,
где Ѕ – длина орбиты.
Из него следует, что const этой пропорции принадлежит только этим четырём свойствам, и совершенно непонятно какой механизм их связывает. И даже кажется, что произведение MG, хотя и имеет равный левой части уравнения результат, отображает только формальное равенство как взаимосвязь свойств через const, но никак не одинаковый механизм взаимодействия. Качественно R3/T2 – движение, а MG – неподвижность, поскольку закон оперирует только движением. А что делать, если эта const связывает бесчисленное множество свойств, как бы не имеющих прямого отношения к третьему закону Кеплера? Приведу некоторые из них:
const – R3/τ2 = R2vω= v2g/ω2 = FG/g = FR2/M = v4τ … и т.д.
Этот набор инвариантов (которые я назвал кеплеровскими), показывает взаимозависимости свойств, но ничего не говорит о механизме их взаимодействий. Похоже, механизм взаимодействий отображается через комбинации взаимозависимостей свойств, связанных с движением R, v, τ, ω и т.д. А третий закон Кеплера можно формализовать в виде:
R3/τ2 = сonst. (А)
Где τ = Т/ 2 π – приведенное время, локальное время той области пространства, в котором космическое тело движется не по орбите, а падает на другое космическое тело.
Инвариант (А) в классической механике отсутствует так же, как и красивое уравнение-инвариант:
v4/τ = const, (Б)
а из него следует, что скорость вертикального падения тела, например, камня с земной орбиты на Солнце происходит не с положительным ускорением, а с отрицательным. И если представить Солнце газовым шаром, то указанный камень за бесконечный промежуток времени не достигнет центра Солнца, поскольку изменяемая плотность пространства обусловливает замедление течения времени пропорционально кубу скорости. И, следовательно, два камня падающих из различных областей никогда не столкнутся в его центре. В этом физический смысл третьего закона Кеплера, именно он отображается в формулировке динамической аксиомы о параллельных.
Следует отметить, что для русской геометрии становится неприменимым евклидово понятие "прямая линия", поскольку последняя не проходит через две существующие точки. Вероятно, более подходит следующее определение: Прямая линия — след точки движущейся к другой точке по кратчайшему пути. Евклидово определение понятия "точка" можно временно сохранить до осмысливания и понятия «точки» и понятия «прямая».
 Рассмотрим, к каким последствиям приводит эта аксиома.
Рассмотрим, к каким последствиям приводит эта аксиома.
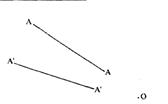
Предположим, что из точки А к точке О движется тело-точка ( рис. 8) и за прошедшее время она прошла расстояние АА, след-траектория ко-торого есть прямая линия. Будем Рис. 8. называть ее прямой. Одновременно из точки А' к тому же центру О движется другое тело-точка. И эта точка прошла расстояние А'А'. Ее след-траектория тоже прямая линия или просто прямая, как и след всех последующих точек. Прямые АА и А'А', оставленные движущимися точками, по геометрии Евклида не являются параллельными.
Но в динамической геометрии они параллельны, поскольку никогда не в состоянии достичь центра О и, следовательно, пересечься в одной точке. К тому же, в отличие от «прямых» Лобачевского и Римана, они действительно прямые. Определим, какие зависимости возникают между движением этих прямых и элементами фигур, образуемых ими. Продолжим построение (рис. 9). Проведем дополнительные прямые АА', А"А",... АnАn так, чтобы по длине они оставались равными между собой, а расстояние между ними определялось отрезком, выходящим из некоторой точки k прямой АА до точки k', лежащей на прямой А'А' под углом Akk' к прямой А′А' и равным ему углом А'kk' прямой АА
 След следующей прямой проводим по тем же правилам из точки k ' прямой А'А' к точке k" прямой А"А". И так до тех пор, пока отрезок, выходящий из точки kn прямой АпАn, не замкнет построение ломаной на прямой АА. Поскольку расстояние между прямыми одинаково, а углы на пересечении каждого отрезкас прямой равны, замыкающий отрезок попадет в ту же точку k прямой АА, из которой вышел отрезок kkn. Замкнутая ломаная kk'k"...кn образует равносторонний многоугольник. В результате получаем на плоскости «часто-кол» прямых, имеющих своим стремлением Рис. 9.недостижимый в бесконечности, а потому фиктив- ный, центр О. Все прямые в своем движении к недостижимому центру параллельны и по определению и по структуре напряженности на поверхности плоскости. А основная особенность образовавшегося правильного многоугольника ¾ дихотомия конечного и бесконечного в том, что конечный периметр замыкает в себя площадь бесконечной величины. Если теперь через центры отрезков, образующих стороны многоугольника kk′ k'k", k"k"',…, knk, провести новые прямые и соединить их отрезками по правилам, изложенным выше, то получим многоугольник с количеством сторон, превышающем количество первого в два раза. При продолжении этой операции бесчисленное число раз длина отрезков kk', k'k",..., k"k будетстремиться к минимуму, а углы Аkk', А'k'k′′ А′'k′'k′",... устремятся к π/ 2, и в пределе многоугольник kk′k′′ …kn долженпревратится в окружность на плоскости. Плоскость окружности одновременно будет обладать свойствами евклидовой статической геометрии, и содержать в своих границах площадь конечной величины, и свойствами неевклидовой геометрии и содержать в тех же границах площадь величины бесконечной. Две несовместимые площади как бы налагаются друг на друга.
След следующей прямой проводим по тем же правилам из точки k ' прямой А'А' к точке k" прямой А"А". И так до тех пор, пока отрезок, выходящий из точки kn прямой АпАn, не замкнет построение ломаной на прямой АА. Поскольку расстояние между прямыми одинаково, а углы на пересечении каждого отрезкас прямой равны, замыкающий отрезок попадет в ту же точку k прямой АА, из которой вышел отрезок kkn. Замкнутая ломаная kk'k"...кn образует равносторонний многоугольник. В результате получаем на плоскости «часто-кол» прямых, имеющих своим стремлением Рис. 9.недостижимый в бесконечности, а потому фиктив- ный, центр О. Все прямые в своем движении к недостижимому центру параллельны и по определению и по структуре напряженности на поверхности плоскости. А основная особенность образовавшегося правильного многоугольника ¾ дихотомия конечного и бесконечного в том, что конечный периметр замыкает в себя площадь бесконечной величины. Если теперь через центры отрезков, образующих стороны многоугольника kk′ k'k", k"k"',…, knk, провести новые прямые и соединить их отрезками по правилам, изложенным выше, то получим многоугольник с количеством сторон, превышающем количество первого в два раза. При продолжении этой операции бесчисленное число раз длина отрезков kk', k'k",..., k"k будетстремиться к минимуму, а углы Аkk', А'k'k′′ А′'k′'k′",... устремятся к π/ 2, и в пределе многоугольник kk′k′′ …kn долженпревратится в окружность на плоскости. Плоскость окружности одновременно будет обладать свойствами евклидовой статической геометрии, и содержать в своих границах площадь конечной величины, и свойствами неевклидовой геометрии и содержать в тех же границах площадь величины бесконечной. Две несовместимые площади как бы налагаются друг на друга.
В полном соответствии с геометрией Евклида длина окружности S будет равна 2 π радиан, а радиус, напротив, будет стремиться к бесконечности, никогда не достигая центра О. Последний в данном случае, отсутствует. Прямая может исходить из какой-то точки окружности или входить в нее, но никогда не может пройти бесконечность. В то же время, по геометрии Евклида, центр у данной окружности S имеется, длина радиуса R конечна и определяется уравнением:
R = S/ 2 π.
Получается, что одни и те же геометрические элементы можно одновременно мерить и жесткими стержнями (геометрия Евклида) и динамическими. А это означает, что между геометрией статической и динамической имеется определенная взаимосвязь. Попробуем ее отыскать.
Отложим от точки k вправо и влево (см. рис.9) по отрезку kk1 и kk2 одинаковой длины в евклидовой мерности и, используя предыдущее правило построения, проведем через них еще две окружности k1'k1"k1′"... k1n и k2′k2′′k2′′′… k2n. Естественно, что окружности k1 и k2 по отношению к окружности k будут описанной и вписанной. И это единственное, что общее, как для евклидовой, так и для неевклидовой геометрии.
Отличие же их начинается уже с того, что наружу от окружности обе геометрии допускают проведение бессчетного числа окружностей на одинаковом расстоянии друг от друга, а внутри окружности k, по геометрии Евклида, число таких окружностей ограничено, для динамичёской же геометрии — снова не ограничено. Каждая окружность — эквипотенциальная линия относительно точки О. И длина ее (или окружность) равна бесконечности одного ранга, т.е. они равны между собой. Это есть следствие аксиомы о динамических параллельных. Оно может быть сформулировано следующим образом:
Дуги-хорды kk', k1k1′, пересекающие прямые АА и А'А' под одним углом и на некотором расстоянии друг от друга, имеют одинаковую длину.
Это следствие — теорема требующее доказательства. В настоящей работе она предлагается как аксиома. И на ее основе получается, что:
• В геометрии Евклида длина всех окружностей различна, а в неевклидовой одинакова. Линия же окружности является прямой.
• В геометрии Евклида линия окружности непрерывна, а в неевклидовой дискретна и состоит из бесчисленного множества одинаковых отрезков бесконечной длины.
• В статической геометрии радиус окружности конечен, в динамической бесконечен.
• В статической геометрии взаимодействие между радиусом и окружностью отсутствует, в динамической наличествует.
• Статическая геометрия радиусы и окружности не связывает со временем, в динамической такая связь имеется и т.д.
Таким образом, отсутствие одинаковых качеств у окружностей двух геометрий лишает нас возможности определения взаимосвязи между ними по качественным признакам и вынуждает использовать свойства несоизмеримых чисел (что вполне понятно, поскольку конечное и бесконечное несоизмеримы по определению). Возьмем, например, два евклидовых круга одинакового радиуса r и площадью S. Сложим площади вместе так, чтобы образовался новый круг в два раза большей площадью S' и определим, насколько радиус R нового круга больше радиуса r маленького круга. Площадь большого круга S'= πR2, малого S = πr2:
πR2 = 2 r2π R = r√2= 1,41421... r.
Число √2, по Дедекинду, и есть несоизмеримое иррациональное число, символ особого способа распределения соизмеримых чисел [17]. В динамической геометрии, однако, это символ связности, а в данном случае — качественный коэффициент, обусловливающий изменение пространства при движении в нем двух линий к отдаленному центру. При коэффициенте связности, равном √2, две линии, движущиеся на плоскости к одному центру, всегда параллельны, или, что то же самое, никогда не пересекаются на бесконечности. При устремлений √ 2→ 1 соизмеримость бесконечности меняется, и при достижении 1 динамическая геометрия переходит в статическую геометрию Евклида на плоскости.
Определим, чему равно несоизмеримое число, описывающее пространство. Используем метод построения окружности при образовании сферы. Для этого проведем множество одинаковых прямых АА, параллельных А′А′, направленных к единому центру, но не в плоскости, а в объеме, и получим «ежик» прямых, устремленных в одну точку, на бесконечности. Пересечем их прямыми, исходящими из точки k1, по ранее описанному методу. В результате построения получаем сферический многогранник, Сходящийся при бесчисленном увеличении граней в правильную сферу, имеющую конечную площадь поверхности, но бесконечную длину радиуса.
Имеется и более простой способ построения сферы путем вращения образовавшегося круга вокруг прямой, например, АА (Рис. 9.), становящейся осью вращения, а при повороте на минимальные градусы «втыкаются» прямые, направленные к центру. Но при этом создается иллюзия, что образовавшаяся сфера имеет выделенную ось вращения, и ось эта — прямая, проходящая через центр сферы. В данной же сфере ни одна прямая, входящая в сферу и идущая к центру, до него не доходит и тем более его не проходит.
Любым из этих способов можно построить бесчисленное количество сфер как внутренних, так и внешних по отношению к базисной сфере k, объем каждой, из которых будет конечен в евклидовой геометрии и бесконечен в динамической. И если объем всех евклидовых сфер геометрически различен, то объем неевклидовых сфер физически равен друг другу, т.е. обладает тем же соотношением качеств, что и окружности.
Теперь, исходя из метричности евклидовых объемов сфер, определим величину коэффициента объемной связности (объемное число Дедекинда). Мысленно вычленим внутри одной сферы V другую таким образом, чтобы объем вычлененной сферы Vо и объем сферы V1 между поверхностями двух сфер были равны: V = Vо, тогда суммарный объем V равен:
V = 4/3 πR3; V1 + Vо = 2 V = 8 / 3 πR3.
Определим, насколько радиус внешней сферы R превышает радиус внутренней r, R3 = 2 r3.
Отсюда: R = 3√2 r = 1,259921... r. k = 1,259921.
Таким образом, коэффициент связности объема k (несоизмеримое число Дедекинда) равно:
k = 3√2 = 1, 259921...
Это число, как и коэффициент связности окружности, является иррациональным и обусловливает бесконечное движение параллельных к центру сферы.
Хотя коэффициент связности и является безразмерностной величиной, он качественно индивидуален для каждого параметра. Говоря словами Дедекинда, каждый коэффициент принадлежит своему и только своему рангу параметров, а потому для каждого из них необходима собственная индексация.
2.2. Структурирование динамического
пространства
Известно, что проблема бесконечного включает дихотомию взаимосвязи двух пар категорий, с одной стороны, различие конечного и бесконечного, с другой — покоя и движения. Попарное существование противоположных форм категорий обусловливает различие в подходе к описательному отображению космических тел и структур. Это различие, прежде всего, относится к первичным понятиям: тело-точка, прямая-луч, плоскость, движение и т.д.
Выше было показано, что тело в динамической геометрии представляет материальную сферу, бесконечную внутрь и отграниченную собственной поверхностью от окружающего пространства. Тело, как вещественное образование, формирует структуру и влияет на внешнее пространство в соответствии с энергетической напряженностью, создаваемой количественной величиной всех своих свойств.
Тело можно представить точкой только тогда, когда ее параметры и собственная напряженность несопоставимы по рангу с параметрами и напряженностью окружающего пространства и тел, образующих структуру данного пространства.
Линия или прямая есть условный след от движения точки (тела) в пространстве. И начало, и конец линии входят в поверхность некоторых точек. Линии на участке от поверхности одной точки-сферы до другой имеют конечную длину изменяемой метричности, отождествляемую с некоторой метрической цифрой.
Если эту же прямую продолжить за пределы поверхности конечных точек-сфер, или внутрь их, то прямая станет иметь бесконечную длину, не отождествимую ни с какими действительными числами.
Линия (условная), соединяющая две движущиеся определенным образом точки, называется образующим лучом или образующим. Образующий луч индексируется начальной буквой слова — Л. Так, если одна из точек неподвижна на плоскости, а другая, не меняя расстояния до первой, описывает в движении правильный круг, то образующий луч с такими свойствами в геометрии называется радиусом.
В пространственных системах образующий луч Л всегда подвижен, и каждая его точка в процессе движения описывает геометрическую фигуру, соответствующую уравнению движения и коэффициенту связности. Естественно, что в уравнении движения зашифрована и напряженность области концевых точек луча и пространства, в котором луч движется. (Везде предполагается, что след движения остается только от перемещения концевых точек.)
Основной способ движения луча в динамической геометрии — собственное удлинение или сокращение (пульсация) с определенным периодом, сочетающийся с вращением и некоторым
пространственным перемещением, например, в пространстве декартовых координат. Поэтому кривые (следы), плоскости и пространства всех геометрий, включая Евклидову, Лобачевского и Римана, описываются образующим лучом, один конец которого может двигаться по линии или оставаться неподвижным, а другой, в движении, удлиняться или сокращаться. На рис. 10 показано, как, двигаясь на плоскости, образующий АО от точки А до точки А', остается неизменным по длине и описы-
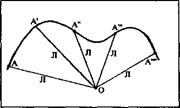 вает дугу окружности полностью в соответствии с геометрией Евклида. В точке А' он в движении начинает укорачиваться и до точки А" движется по сферической кривой, описывая линию положи-тельной кривизны в соответствии с геометрией Римана. В точке А" происходит следующий перелом и образующий на участке А" А"' начинает описывать линию отри-Рис. 10. цательной кривизны по геометрии Лобачевского до точки А'", после которой линия движения снова меняет «свою» геометрию и т.д. Переломные точки А', А", А'", А"" имеют статическую для этой области величину луча, и потому луч может быть отнесен к геометрии Евклида. Перелом есть изменение качества, процесс перехода от одной кривизны к другой.
вает дугу окружности полностью в соответствии с геометрией Евклида. В точке А' он в движении начинает укорачиваться и до точки А" движется по сферической кривой, описывая линию положи-тельной кривизны в соответствии с геометрией Римана. В точке А" происходит следующий перелом и образующий на участке А" А"' начинает описывать линию отри-Рис. 10. цательной кривизны по геометрии Лобачевского до точки А'", после которой линия движения снова меняет «свою» геометрию и т.д. Переломные точки А', А", А'", А"" имеют статическую для этой области величину луча, и потому луч может быть отнесен к геометрии Евклида. Перелом есть изменение качества, процесс перехода от одной кривизны к другой.
Оба конца луча могут совершать любые движения, описывать самые различные фигуры, кроме тех, которые могут привести к их пересечению между собой. Так, например, если конец луча, описывающий кривую АА'А"А'"... (рис. 10), замкнется при одновременном движении другого конца-точки О по прямой, то выписывается объемная фигура — профилированный цилиндр. Если же точка О будет двигаться по окружности, то вместо цилиндра получается тор того же профиля. Таким образом, возникновение искривления как положительного, так и отрицательного, связано с изменением длины луча, создающего это «искривление». Длина луча, в свою очередь, зависит от напряженности пространства в различных направлениях от точки, из которой он исходит. Изменение напряженности не есть искривление поверхности и не приводит к нему, а вызывает изменение метричности. И, следовательно, длины луча. Покажу это (рис.11).
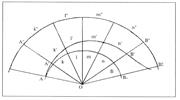 Пусть луч АО, исходящий из условной точки О, двигаясь по отрезку окружности АВО, начал удлиняться и в точке А' пересек прямую А"О. Продолжая дальнейшее движение, он пересек также прямую ОВ" — окончание дуги АВ.
Пусть луч АО, исходящий из условной точки О, двигаясь по отрезку окружности АВО, начал удлиняться и в точке А' пересек прямую А"О. Продолжая дальнейшее движение, он пересек также прямую ОВ" — окончание дуги АВ.
Дуга АВ разделена прямыми на четыре равных отрезка к, l, т, п. Прямые, разделившие дугу, продолжены до пересечения эквипотенциальной линии А" В" и также делят эту дугу на четыре Рис. 11. равных отрезка к", l", т", п". В пространстве отрезки k" = k = l′′ = l = т" = т = п" = п, как следствие пропорционального изменения напряженности от точки О к периферии поверхности. Поскольку пропорциональность напряженности сохраняется на всей поверхности, то отрезок А'В' делится на четыре части к', l′, т', п′ так что: к' = l' = т' = п′ хотя по евклидовой и римановой геометрии к' ≠ п′.
Естественно также, что к = к' = к"; l = l' = l"; т = т' = т"; п = п' = п". То есть все отрезки равны между собой так, что отношение каждого из отрезков к длине соответствующего луча между эквипотенциальными дугами будет величиной постоянной. Именно это свойство напряженности пространства обусловливает образование пространственных ячеек — основных элементов динамической геометрии. Напряженность и изменение метричности (кривизна относительно статичности) — это те факторы, которые не учитывались в теории кривизны ни Гауссом, ни Риманом. Отмечу, что кривизны поверхностей, а тем более кривизны объемов в пространстве не существует. А поскольку пространство отображает динамическую структуру реального мира, то эмпирическое подтверждение ее адекватности этому миру можно получить прямо на поверхности Земли.
Приведу описание нескольких экспериментов, подтверждающих такую возможность. В долине вблизи гор можно построить горизонтальную мерную милю из идеального материала длиной в 3 км (с точностью до 1 см). Произвести геодезическую съемку этой мили и перенести ее размеры не по отвесу на горное плато на высоту одного, а лучше 2 км, и там построить по теодолиту другую горизонтальную мерную милю той же длины. Современные геодезические приборы позволяют провести операцию переноса на несколько десятков километров с точностью до 2-3 см. В соответствии с геометрией Евклида мили и в долине и на плато должны быть не одинаковой длины. Миля на плато на высоте 1 км будет на 47 см длиннее мили в долине, а на высоте 2 км – на 94 см.
Следует замерить милю в долине несколькими твёрдыми мерными линейками, проведя ими же в аналогичных условиях измерение мили на плато, убедиться, что она в точности, до ошибок измерения, равна миле в долине, а, следовательно, мерные линейки изменили свою длину.
Другой эксперимент: на горе с горизонтальным плато на высоте 2 км выложить горизонтально из 40-50 стальных стержней длиной по 20-25 м (± 0,1 мм) единый стержень километровой длины. Отметки его концов перенести теодолитом в долину под горой, потом разобрать конструкцию, перебросить ее в долину и вновь собрать. Согласно геометрии Евклида собранная конструкция должна быть длиннее отметок на 32 см. Однако длина стержней при измерении метром окажутся в рамках отметок ± ошибка измерения.
Наконец можно просто провести геодезическими приборами измерение отрезка относительно горизонтальной поверхности в долине на длине 10 км и, замерив такую же длину, перенесенную теодолитом на плато на высоту 2 км, убедиться с достаточно грубым приближением (± 25-30 см) в исчезновении при измерении отрезка почти трехметровой длины. (Можно предположить, что аналогичные нестыковки уже встречались картографам и геодезистам и не получали теоретического объяснения.)








