 2015-06-04
2015-06-04 834
834В черной металлургии широко используется как системы автоматического регулирования отдельных параметров (температуры, давления, расхода вещества и др.), так и системы комплексного автоматического управления технологическими процессами и производствами.
Задачей систем автоматического регулирования является стабилизация регулируемой величины на заданном уровне, причем этот уровень может быть постоянным или изменяться по заданному закону в функции времени или другого параметра.
Задачей автоматической системы управления является обеспечение целесообразной работы объекта управления (агрегата или процесса) при заданных ограничениях, обусловленных состоянием объекта и ресурсами управления.
При этом целями управления могут быть: достижение максимальной производительности, экономичности производства или оптимальное качество продукции.
I. Характер изменения задающего воздействия определяет деление систем автоматического управления на три класса: автоматической стабилизации, программного управления и следящие.
В системах автоматической стабилизации (САС) задающее воздействие остается постоянным. Основная задача – поддержание регулируемой величины, независимо от действующих возмущений, на постоянном уровне с допустимой погрешностью – регулирование по возмущению.
САС характеризуются отклонением регулируемой величины – разностью между значением регулируемой величины в данный момент времени и ее значением, принятым за начало отсчета. Это дает качественную оценку динамическим свойствам САС.
На рисунке 3.1 дан график изменения регулируемой величины y(t). Пусть в момент времени t1 возмущающее воздействие f(t) скачком изменилось от величины F1 до величины F2 (прямая 1). Это вызовет изменение регулируемой величины у(t) (кривая 2) и отклонение ее от исходного значения у(t1). Тогда в соответствии с определением ордината ВС будет представлять отклонение регулируемой величины в момент времени t2.
Примером систем рассмотренного класса является система стабилизации температуры методической нагревательной печи прокатного стана.
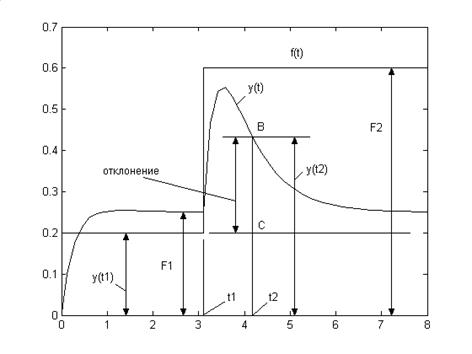 |
Рис. 3.1. Изменение параметров в системе автоматической стабилизации
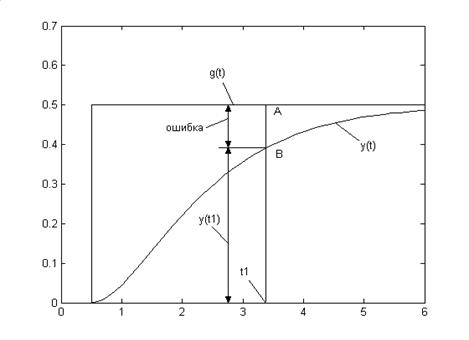 |
Рис. 3.2. Изменение параметров в системе программного управления
Системы программного управления (СПУ) обеспечивают изменение регулируемой величины по наперед заданному закону – программе. Задающее воздействие является известной функцией времени или координат системы (рисунок 3.2). При управлении по заданию о точности работы системы судят по величине динамической ошибки, которая определяется как разность между задающим воздействием и регулируемой величиной в данный момент времени
δ (t) = g(t) – y(t).
Предположим, что задающее воздействие g(t) в момент времени t = 0 скачком изменилось от нуля до некоторой постоянной величины и в последующие моменты времени остается неизменным (линия 1). Это вызовет реакцию системы, определяе мую кривой 2. Тогда ошибкой для момента времени t1 будет отрезок АВ.
Пример – система программного управления нажимным устройством реверсивного прокатного стана, которое обеспечивает изменение положения верхнего валка перед каждым проходом в соответствии с заданной программой обжатий.
В следящих системах задающее воздействие так же, как в системах программного управления, является переменной величиной. Однако источником задающего сигнала служит случайное внешнее воздействие.
Например, система синхронизации скорости ножей летучих ножниц со скоростью прокатки в последней клети непрерывного стана является следящей системой. В ней каретка «следит» за движением полосы.
Так как следящие системы предназначены для воспроизведения на выходе задающего воздействия с возможно большей точностью, то динамическая ошибка, как и в случае систем программного управления, является той характеристикой, по которой можно судить о динамических свойствах САУ.
II. По виду математического описания различают линейные и нелинейные, стационарные и нестационарные САУ.
Линейные системы описываются линейными дифференциальными уравнениями. Для линейных систем справедлив принцип суперпозиции. Реакция системы на любую комбинацию внешних воздействий равна сумме реакций на каждое из этих воздействий по отдельности.
Это позволяет выразить реакцию системы на любое сложное воздействие через последовательность ее реакций на простые воздействия. Благодаря этому принципу и была разработана общая теория линейных САУ.
Однако практически все реальные системы нелинейны, поскольку чтобы система стала нелинейной достаточно иметь в ее составе хотя бы одно нелинейное звено.
Нелинейные системы описываются нелинейными уравнениями, которые в общем виде не решаются. Поэтому для получения аналитического решения, описывающего поведение таких систем, прибегают к линеаризации – замене нелинейных зависимостей линейными приближениями, которые не слишком искажают реакцию реальных САУ.
Стационарной называют САУ, все внутренние параметры которой постоянны. В нестационарной системе все или некоторые параметры являются функциями времени. Поэтому реакция такой САУ на одно и то же воздействие зависит от момента его приложения. Например, СУ полетом ракеты, масса которой изменяется по мере расхода топлива.
Примечание. Вид и сложность математического описания зависят не только от особенности самой системы, но также от характера решаемой с помощью этого описания задачи. Допущения и упрощения вполне оправданные в одних случаях, оказываются недопустимыми в других. Поскольку точное математическое описание создать чрезвычайно сложно даже в простых случаях, на практике пользуются несколькими идеализированными математическими моделями, применительно к которым разработаны методы теории автоматического управления.








