 2015-06-04
2015-06-04 4336
4336Цифровое устройство управления может выполнять функцию корректирующего устройства в контуре регулирования. Его аппаратурная или программная реализация есть цифровой фильтр. В общем случае дискретная ПФ фильтра имеет вид
 , (2.12)
, (2.12)
где некоторые из коэффициентов могут быть равны нулю. Если разделить числитель и знаменатель на zn, получим
 .
.
Обозначая входной и выходной сигналы фильтра соответственно e и u и учитывая, что  , получаем уравнение
, получаем уравнение

Учитывая, что 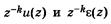 означают запаздывание сигналов u и e на k интервалов дискретности
означают запаздывание сигналов u и e на k интервалов дискретности  , переходя к оригиналу и разрешая уравнение относительно текущего значения сигнала управления uk, получаем
, переходя к оригиналу и разрешая уравнение относительно текущего значения сигнала управления uk, получаем
 (2.13)
(2.13)
Таким образом, для определения сигнала управления на k -м интервале необходимо располагать значениями выходной и входной величин фильтра на n предыдущих интервалах, где n – порядок ПФ фильтра.
Если а 1 =... аn = 0, фильтр называется нерекурсивным. Он использует информацию о предыдущих значениях лишь на входе.
Цифровой фильтр называется рекурсивным, если он использует информацию о значениях на выходе в предыдущих интервалах.
Структура рекурсивного фильтра с ПФ (2.12) при n = 2 получается, если ввести вспомогательные переменные 
 Тогда для переменной u0(z) на основании выражения (2.13) получим
Тогда для переменной u0(z) на основании выражения (2.13) получим
 .
.
Это выражение реализуется структурой, представленной на рис. 2.12 двумя запаздывающими звеньями в прямом канале и отрицательными обратными связями a 1/ a 2 и a 0/ a 2. Выходная величина фильтра получается на основании выражения

что структурно реализуется суммированием на выходе звена (см. рис. 2.12). Полученная структурная схема может служить основой для аппаратурной реализации. При этом каждое звено запаздывания символизирует хранение переменной в памяти на протяжении одного интервала дискретности, а каждое безынерционное звено означает умножение переменной на постоянный коэффициент. Узел суммирования реализуется суммирующим устройством.
Программная реализация основывается на алгоритме расчета uk по формуле (2.13).
Рис. 2.12. Структура рекурсивного цифрового фильтра
ЛИТЕРАТУРА
1. Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования – М.: Наука, 1972. – 768 с.
2. Бесекерский В.А., Попов Е.П. Теория систем автоматического управления – Изд. 4-е, перераб. и доп. – СПб: Изд-во «Профессия», 2003. – 752 с.
3. Ким Д.П. Теория автоматического управления. Т.1. Линейные системы. – М.: ФИЗМАТЛИТ, 2003. – 288 с.
4. Воронов А.А. Основы теории автоматического управления: Автоматическое регулирование непрерывных линейных систем. – М., Энергия, 1980. – 312 с.
5. Андрющенко В.А. Теория систем автоматического управления. – Л.: Издательство Ленинградского университета, 1990. – 256 с.
6. Попов Е.П. Теория линейных систем автоматического регулирования и управления. – М., Наука, 1989. – 304 с.
7. Солодовников В.В., Плотников В.Н., Яковлев А.В. Основы теории и элементы систем автоматического регулирования. – М.: Машиностроение, 1985. – 536 с
8. Юревич Е.И. Теория автоматического управления. – Л., Энергия, 1975. – 416 с.
[1] От латинского "recurrere" – "возвращаться"








