 2015-06-05
2015-06-05 2306
2306Автоматические системы регулирования (АСР)
Глава I Основные виды и процессы АСР
Основные понятия и определения
В силу ряда внешних причин (изменение состава и расхода сырья, параметров тепло- и хладоагентов и др.) или явлений, протекающих в самом аппарате (изменение гидродинамической обстановки в аппарате, условий передачи тепла через поверхности, активности катализатора и др.), указанные величины могут отклоняться от номинальных значений. Это приведет к нарушению /процесса, снижению количества и качества получаемой продукции, интенсивному износу оборудования. Чтобы процесс протекал нормально, им нужно управлять.
Управление может быть ручным или автоматическим.
При автоматическом управлении (рис. 1-1,б) воздействие на объект осуществляется специальным автоматическим устройством в замкнутом контуре; Такое соединение элементов образует автоматическую систему управления. Частным случаем управления является регулирование.
Регулированием называют поддержание выходных величин объекта вблизи требуемых постоянных или переменных значений с целью обеспечения нормального режима его работы посредством подачи на объект управляющих воздействий.
Автоматическое устройство, обеспечивающее поддержание выходных величин объекта вблизи требуемых значений, называют автоматическим регулятором.
Для обеспечения нормальной работы различных по назначению и конструкции аппаратов и установок химической промышленности необходимы регулировать технологические величины: температуры, давления, расходы, уровни, концентрации и др. Автоматические системы регулирования АСР используемые для этой цели, классифицируют по нескольким характерным признакам.
По принципу регулирования АСР делят на действующие по отклонению, по возмущению и по комбинированному принципу.
По отклонению. Таким образом, регулятор формирует регулирующее воздействие, постоянно оценивая результат работы системы по величине отклонения регулируемого параметра от заданного значения. Такой способ регули-рования получил название «регулирование по отклонению». Реализа-ция способа возможна благодаря использованию обратной связи, ко-торая обеспечивает передачу информации с выхода системы на вход и создает замкнутый контур регулирования.
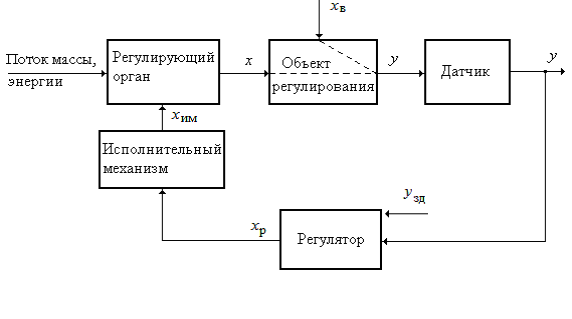
Рис. 8.2. Схема одноконтурной системы регулирования по отклонению
По возмущению:
Системы, работающие по принципу компенсации возмущения, не имеют замкнутого контура регулирования и поэтому не анали-зируют результат (рис. 8.3).
Рис. 8.3. Схема системы регулирования по возмущению
Датчик измеряет величину возмущающего воздействия и преобразует в унифицированный сигнал x в, который поступает в регулятор, где сравнивается с номинальным значением x н. Если отклонение текущего значения мало отличается от номинального | x в(t) - x н | <  в, то система находится в равновесии. Если отклонение превысит величину в, то регулятор преобразует это отклонение по заданному закону в регулирующее воздействие x р, исполнительный механизм с помощью регулирующего органа изменит поток массы или энергии в объект, чтобы компенсировать влияние возмущения на величину регулируемого параметра, не дожидаясь его изменения. Реализуется принцип опережения воздействия по отношению к реакции системы. В этом случае алгоритм регулятора с большой точностью должен учитывать статические и динамические свойства всей системы. Достичь этого в абсолютном большинстве случаев не удается в связи со сложностью технологических процессов, поэтому используются комбинированные системы, сочетающие положительные свойства систем регулирования по отклонению и по возмущению (см. рис. 8.4). Выбирается внешнее возмущающее воздействие, оказывающее наибольшее влияние на процесс, и строится система компенсации влияния этого возмущения на базе регулятора 2. Влияние остальных возмущений компенсируется АСР, работающей по принципу отклонения и реализованной на базе регулятора 1.
в, то система находится в равновесии. Если отклонение превысит величину в, то регулятор преобразует это отклонение по заданному закону в регулирующее воздействие x р, исполнительный механизм с помощью регулирующего органа изменит поток массы или энергии в объект, чтобы компенсировать влияние возмущения на величину регулируемого параметра, не дожидаясь его изменения. Реализуется принцип опережения воздействия по отношению к реакции системы. В этом случае алгоритм регулятора с большой точностью должен учитывать статические и динамические свойства всей системы. Достичь этого в абсолютном большинстве случаев не удается в связи со сложностью технологических процессов, поэтому используются комбинированные системы, сочетающие положительные свойства систем регулирования по отклонению и по возмущению (см. рис. 8.4). Выбирается внешнее возмущающее воздействие, оказывающее наибольшее влияние на процесс, и строится система компенсации влияния этого возмущения на базе регулятора 2. Влияние остальных возмущений компенсируется АСР, работающей по принципу отклонения и реализованной на базе регулятора 1.
.
По комбинированному принципу:
При таком регулировании, т. е. при совместном использовании принципов регулирования по отклонению, и по возмущению {рис. 1-6,в), удается получить высококачественные системы. В них влияние основного возмущения z1 нейтрализуется регулятором АРв, работающим по принципу возмущения, а влияние других возмущений (например, z2 и др.)—регулятором АР, реагирующим на отклонение текущего значения реагируемой величины от заданного значения
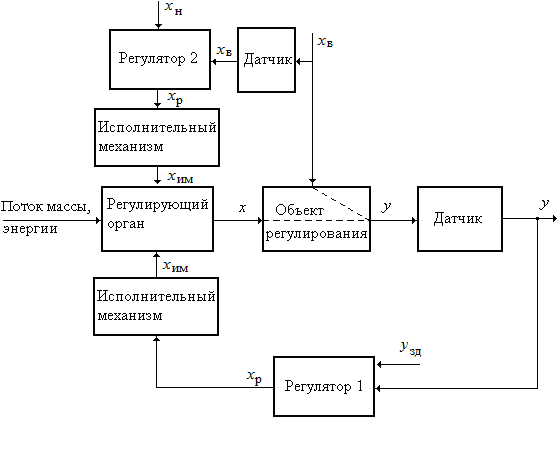
Рис. 8.4. Схема комбинированной системы регулирования
По числу регулируемых величин АСР делят на одномерные и многомерные. Одномерные системы имеют по одной регулируемой величине, вторые — по несколько регулируемых величин.
В свою очередь многомерные системы могут быть разделены на системы несвязанного и связанного регулирования. В первых из них регуляторы непосредственно не связаны между собой и воздействуют на общий для них объект регулирования раздельно. Системы несвязанного регулирования обычно используются, когда взаимное влияние регулируемых величин объекта мало или практически отсутствует. В противном случае применяют системы связанного регулирования, в которых регуляторы различных величин одного технологического объекта связаны между собой внешними связями (вне объекта) с целью ослабления взаимного влияния регулируемых величин. Если при этом удается полностью исключить влияние регулируемых величин одна на другую, то такая система связанного регулирования называется автономной.
По числу контуров прохождения сигналов АСР делят на одноконтурные и многоконтурные. Одноконтурными называются системы, содержащие один замкнутый контур, а многоконтурными — имеющие несколько замкнутых, контуров. Многоконтурные АСР могут применяться и для регулирования одной величины с целью повышения качества переходного процесса (см. ниже).
По назначению (характеру изменения задающего воздействия) АСР подразделяются на системы автоматической стабилизации, системы программного управления и следящие системы.
Системы автоматической стабилизации предназначены для поддержания регулируемой величины на заданном значении, которое устанавливается постоянным (u=const). Это наиболее распространенные системы.
Системы программного управления построены таким образом, что заданное значение регулируемой величины представляет собой известную заранее функцию времени u=f(t). Они снабжаются программными датчиками, формирующими величину и во времени. Такие системы используются при автоматизации химико-технологических процессов периодического действия или процессов, работающих по определенному циклу.
В следящих системах заданное значение регулируемой величины заранее не известно и является функцией внешней независимой технологической величины u=f(y1). Эти системы служат для регулирования одной технологической величины (ведомой), находящейся в определенной зависимости от значений другой (ведущей) технологической величины. Разновидностью следящих систем являются системы регулирования соотношения двух величин, например, расходов двух продуктов. Такие системы воспроизводят на выходе изменение ведомой величины в определенном соотношении с изменением ведущей. Эти системы стремятся устранить рассогласование между значением ведущей величины, умноженным на постоянный коэффициент, и значением ведомой величины.
По характеру регулирующих воздействий различают непрерывные АСР, релейные и импульсные.
Непрерывные АСР построены так, что непрерывному изменению входной величины системы соответствует непрерывное изменение величины на выходе каждого звена.
Релейные (позиционные) A CP имеют в своем составе релейное звено, которое преобразует непрерывную входную величину в дискретную релейную, принимающую только два фиксированных значения: минимально и максимально возможное. Релейные звенья позволяют создавать системы с очень большими коэффициентами усиления. Однако в замкнутом контуре регулирования наличие релейных звеньев приводит к автоколебаниям регулируемой величины с определенными периодом и амплитудой. Системы с позиционными регуляторам являются релейными (см. гл. VI).
Импульсные АСР имеют в своем составе импульсное звено,, которое преобразует непрерывную входную величину в дискретную импульсную, т. е. в последовательность импульсов с определенным периодом их чередования. Период появления импульсов задается принудительно. Входной величине пропорциональны амплитуда или длительность импульсов на выходе. Введение импульсного звена освобождает измерительное устройство системы от нагрузки и позволяет применять на выходе маломощное, но более чувствительное измерительное устройство, реагирующее на малые отклонения регулируемой величины, что приводит к повышению качества работы системы.
В импульсном режиме возможно построение многоканальных схем, при этом уменьшается расход энергии на приведение в действие исполнительного устройства.
Системы с цифровым вычислительным устройством в замкнутом контуре регулирования также работают в импульсном режиме, поскольку цифровое устройство выдает результат вычисления в виде импульсов, следующих через некоторые промежутки времени, необходимые для проведения вычислений. Это устройство применяют, когда отклонение регулируемой ве-личины от заданного значения должно вычисляться по показаниям нескольких измерительных приборов или когда в соответствии с критериями наилучшего качества работы системы необходимо вычислять программу изменения регулируемой величины.
Наряду с рассмотренными АСР химико-технологических процессов применяются также экстремальные системы.
Экстремальные системы. Оптимальный режим работы объекта характеризуется экстремальным (максимальным или минимальным) значением показателя эффективности процесса, протекающего в объекте. Таким показателем может быть либо технологическая величина, либо одна из экономических характеристик. Вследствие влияния возмущений оптимальный режим работы объектов нарушается. Системы стабилизации не способны скомпенсировать такие отклонения. Для отыскания оптимального режима служат экстремальные системы. Эта задача решается автоматическим поиском таких значений управляющих воздействий, которые соответствуют экстремаль-ному значению показателя эффективности процесса. Системы, осуществляющие автоматический поиск нескольких управляющих величин объекта с целью обеспечения экстремального значения показателя эффективности протекающего в нем процесса, называются оптимальными. На практике же оптимизируемая величина объекта часто зависит не от нескольких, а от одной управляющей величины; такие оптимальные системы называют экстремальными системами регулирования.
Обобщая и конкретизируя следует: в стабилизирующей АСР задатчик формирует постоянное во времени значение y зд(τ) = const, поэтому задача стабилизирующей АСР

