 2015-06-04
2015-06-04 8925
8925Наряду с преобразователями частоты в регулируемом асинхронном электроприводе иногда используется тиристорный регулятор напряжения (ТРН) (рис. 3.17). Он изменяет амплитуду напряжения, подводимого к статору без изменения частоты, и используется главным образом для управления пуском (мягкие пускатели) и осуществления ряда других полезных функций.
Принцип действия тиристорного регулятора напряжения рассмотрим на примере регулирования напряжения на однофазной нагрузке переменного тока zн с помощью однофазного ТРН. Силовая часть ТРН (рис. 3.17, а) образована двумя тиристорами VS1 и VS2, включенными в цепь нагрузки по встречно-параллельной схеме, которая обеспечивает протекание тока в нагрузке в оба полупериода напряжения сети U1. Управление тиристорами осуществляется с помощью системы импульсно-фазового управления (СИФУ), которая подает на тиристоры импульсы управления Uα и обеспечивает их сдвиг на угол управления а в соответствии с величиной внешнего сигнала управления Uy.
Если на тиристоры VS1 и VS2 не подаются импульсы управления от СИФУ, то они закрыты и напряжение на нагрузке Uper равно нулю. При подаче на тиристоры импульсов управления в момент их естественного открывания (угол управления α = 0) они полностью откроются (рис. 3.17, б) и к нагрузке будет приложено нее напряжение сети U1 = Uper за вычетом небольшого (1...3 В) падения напряжения на тиристорах.
Если осуществлять подачу импульсов управления на тиристоры с некоторой задержкой относительно момента их естественного открытия (угол управления α ≠ 0), то к нагрузке будет прикладываться часть напряжения сети (рис. 3.17, б). Изменяя угол управления α от нуля до π, можно регулировать напряжение на нагрузке от полного напряжения сети до нуля при неизменной частоте этого напряжения.
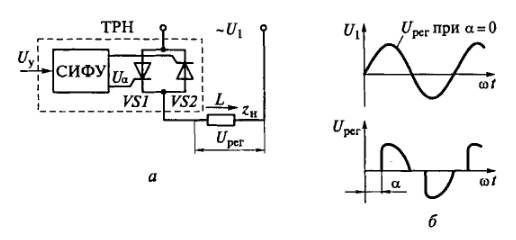
Рис. 3.17. Схема (а) и кривые напряжения (б) однофазного тиристорного регулятора напряжения
При активной нагрузке ТРН кривая тока / в нагрузке будет повторять кривую напряжения на ней, а при активно-индуктивном характере нагрузки будет от нее отличаться. Форма напряжения на нагрузке является несинусоидальной. Несинусоидальное напряжение можно представить как совокупность нескольких синусоидальных напряжений (гармоник). Частота изменения первой из них (основной гармоники) равна частоте питающего напряжения, а частоты других гармоник больше, чем первой. Обычно 1-я гармоника имеет наибольшую амплитуду и по ней ведутся все основные расчеты.
Закрытие тиристоров в непроводящий полупериод происходит за счет напряжения сети (так называемая естественная коммутация тиристоров), что позволяет использовать в схемах ТРН наиболее простые, надежные и дешевые однооперационные тиристоры.
На основе однофазной схемы (см. рис. 3.17, а) построены ТРН для регулирования напряжения на трехфазной нагрузке (рис. 3.18, а). Пример силовой части схемы для регулирования напряжения на статоре трехфазного асинхронного двигателя АД, состоящей из шести тиристоров VS1... VS6, приведена на рис. 3.18, б. За счет добавления в эту схему двух пар тиристоров создаются реверсивные схемы электропривода, а с помощью соответствующего управления ТРН могут обеспечивать и динамическое торможение двигателей.
В схемах ТРН вместо одной пары встречно-параллельно включенных тиристоров может применяться полупроводниковый прибор — симистор, обеспечивающий протекание тока в нагрузке в оба полупериода питающего напряжения и имеющий такой же принцип действия, что и тиристор. Его применение сокращает число электронных приборов вдвое и упрощает схему СИФУ, хотя он и менее надежен в работе.
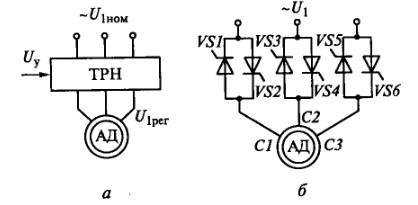
Рис. 3.18. Схемы включения тиристорного регулятора напряжения на трехфазной нагрузке:
а — общая; б — силовая части
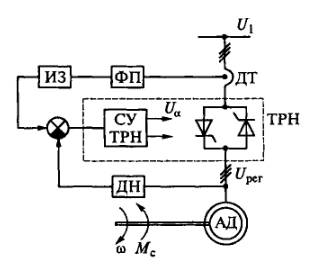
Рис. 3.21. Структурная схема электропривода с экстремальным регулятором
На рис. 3.21 приведена одна из них — схема с так называемым экстремальным регулятором*, позволяющая минимизировать потребляемый двигателем ток при различных нагрузках Mс. Схема содержит асинхронный двигатель АД, ТРН со схемой управления СУ, датчики тока ДТ и напряжения ДН, функциональный преобразователь ФП и инерционное звено ИЗ. За счет выбора характеристики ФП обеспечивается минимизация потребления тока при различных нагрузках двигателя, а инерционное звено ИЗ совместно с отрицательной обратной связью по напряжению устраняет возможные автоколебания в системе.
Показано**, что экстремальные значения переменных двигателя обеспечиваются при определенных (оптимальных) его скольжениях, которые должны поддерживаться постоянными при любых нагрузках. Эти скольжения sопт определяются по формулам:
• при минимизации тока статора —
• при минимизации потерь мощности —

• при минимизации активной потребляемой мощности —

• при максимализации коэффициента мощности —

где R1 R'2, Rμ — соответственно активные сопротивления статора, приведенное ротора и контура намагничивания; Хμ, Хк.з. — соответственно индуктивные сопротивления контура намагничивания и короткого замыкания.
Значение тока статора при оптимальном скольжении может быть вычислено по следующей формуле:

где Мс — момент нагрузки двигателя; ω0 — скорость холостого хода.
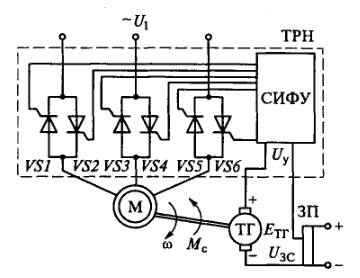
Рис. 3.22. Схема замкнутой системы ТРН — АД с обратной связью по скорости
Требуемый уровень оптимального скольжения может быть реализован в замкнутой по скорости системе ТРН—АД, схема которой приведена на рис. 3.22. На схеме обозначено: ТГ — тахогенератор, ЗП — потенциометр задания требуемой скорости (скольжения) двигателя. Схема обеспечивает поддержание скорости со и тем самым скольжения с определенной точностью при изменениях момента нагрузки Мс.
В качестве примера проведены расчеты по этим формулам применительно к двигателю 4A200L6Y3, имеющему следующие номинальные данные: Pном = 30 кВт; скольжение sном = 0,021; ток статоpa I1ном = 55,8 А; КПД ηном = 90,5 %; cosφном = 0,9. Результаты расчетов при моменте нагрузки 29 Н м, равном 10% номинального момента, приведены в табл. 3.2.
Таблица 3.2

