 2015-06-05
2015-06-05 1654
1654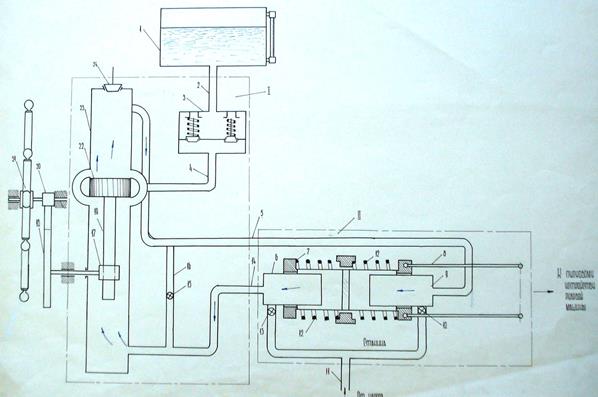
Телемотор предназначен для связи рулевой машины с постом управления.
Он состоит из 2-х основных частей:
1. Датчик манипулятора, расположенного в рулевой рубке;
2. Приемник – расположен в румпельном помещении.
Датчик - манипулятор имеет цилиндр, поршень, зубчатую рейку.
Приемник имеет пустотелые неподвижные втулки 9 и 6, которые входят в полости подвижного цилиндра 7, соединенного тягами 8 с устройством пуска рулевой машины.
Работа телемотора.
При вращении штурвала 21, например, против часовой стрелки, через шестерни и зубчатую рейку поршень 22 перемещается вверх и рабочая жидкость по трубе 5, втулке 9 давит на среднюю перегородку. Цилиндр смещается влево и тягами 8 приведет в действие пусковое устройство рулевой машины. При этом из левой полости цилиндра 7 жидкость через втулку 6 и трубу 14 вытесняется в нижнюю часть цилиндра 23.
Если отпустить штурвал, пружины 12 поставят цилиндр 7 в исходное положение. Для отключения датчика от приемника служит клапан 15 на перепускной трубе. Для наполнения системы или в случае расширения жидкости имеются невозвратные кланы и расширительная цистерна 1.








