 2015-06-05
2015-06-05 2483
2483Машинным телеграфом называется устройство, предназначенное для дистанционной передачи команд из рулевой рубки в машинное отделение об изменении режима работы судовой силовой установки и передачи ответов об исполнении команд.
Конструктивно машинный телеграф состоит из следующих основных приборов: передатчика-приемника, устанавливаемого в рулевой рубке и на крыльях мостика; приемника-передатчика, расположенного в ЦПУ или МО; аппаратуры сигнализации.
На исполнительном посту (ЦПУ или МО) устанавливается приемник-передатчик, совмещающий приемник команд и датчик ответа о принятом приказе. На шкале прибора написаны такие же команды, что и на приборе командного поста.
Приемник-передатчик отличается от передатчика-приемника тем, что в нем отсутствует освещение шкалы (в машинном отделении светло) и имеется система, которая автоматически включает звуковые и световые сигналы для привлечения внимания команды и отключает приборы сигнализации после передачи правильного ответа.
Основными элементами судовых телеграфов переменного тока являются индукциионные приборы синхронной связи - сельсины. В качестве сельсинов-датчиков используются контактные сельсины с однофазной обмоткой на роторе, в качестве приемников - бесконтактные сельсины.
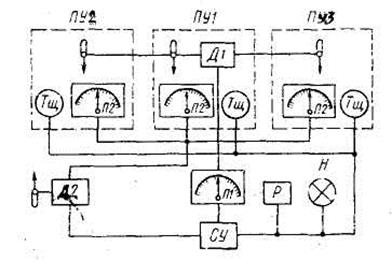
Рисунок 11.3. Элементная схема машинного телеграфа
Посты управления ПУ1 - ПУЗ устанавливаются в рулевой рубке и на крыльях ходового мостика. Центральным является пост ПУ1 в рубке, где размещен датчик Д1 (передатчик приказаний) синхронной связи, поворот которого можно осуществлять посредством механической передачи с любого из трех постов управления. Датчик Д1 соединен линией связи с приемником синхронной связи П1 (приемник приказаний), расположенный в машинном отделении.
При подаче команды поворотом датчика Д1 стрелка приемника П1 устанавливается в положение, соответствующее той или иной команде.
В этом случае включается сигнальное устройство СУ, в которое входят ревун Р, сигнальная лампа Н и трещотки Тщ. Рукоятка датчика Д2 (передатчик ответа) ставится обслуживающим персоналом в машинном отделении в положение, повторяющее положение стрелки приемника П1, что свидетельствует о приеме команды к исполнению.
Датчик Д2 соединен линией связи с приемниками П2 (приемник ответа) постов управления ПУ1 - ПУЗ. Поворот датчика Д2 вызывает перемещение стрелок приемников П2 и установку их в положение, соответствующее поданной команде (стрелки совмещаются с рукоятками постов управления ПУ1 - ПУЗ).
При совмещенном положении рукоятки датчика Д2 и стрелки приемника П1 сигнальное устройство СУ выключает звуковую и световую сигнализацию (ревун Р, лампу Л и трещотки Тщ).

