 2015-06-28
2015-06-28 584
584Федеральное агентство по образованию
Государственное образовательное учреждение
Высшего профессионального образования
«Казанский государственный технологический университет»
Нижнекамский химико-технологический институт
Кафедра АТПиП
КУРСОВАЯ РАБОТА
По дисциплине «ТОАУ»
Тема: «Расчет и исследование динамики автоматической системы регулирования давления».
Студент группы 3501 ______________________ / И.Р. Газизов /
Научный руководитель _____________________ / В.В. Гетман /
Работа защищена ______________________ с оценкой _________________
Нижнекамск 2009
Содержание
1. Задание............................................................ ……………………….3
2. Построение математической модели объекта по экспериментальной переходной характеристике…………………………………………………..4
2.1 Расчет коэффициентов передаточной функции модели…………..6
2.2 Проверка адекватности полученной модели……………………….7
3. Расчет оптимальных настроечных параметров цифровых регуляторов……………………………………………………………………………..9
3.1 Модель и расчетная схема цифровой АСР………………………....9
3.2 Алгоритмы вычислительных устройств цифровых регуляторов..11
3.3 Запас устойчивости систем с цифровыми регуляторами…………12
3.4 Последовательность расчета оптимальных настроечных
параметров………………………………………………………………14
3.5 Результаты расчета………………………………………………….15
4. Расчёт переходных процессов в цифровых АСР……………………..17
5. Выводы………………………………………….……………………….22
6. Список литературы…………………………….……………………….23
Задание
Провести расчет и исследование динамики автоматической системы регулирования. В системе осуществляется регулирование давления.
Канал регулирующего воздействия (изменение задания регулятору на 0,5 кгс/см2) - кривая разгона объекта:
| t, мин | 0,4 | 0,8 | 1,2 | 1,6 | 2,4 | 2,8 | 3,2 | ||
| H, м | 3,1 | 3,6 | 3,8 | 4,2 | 4,9 |
Канал возмущающего воздействия (изменение давления на 20% хода регулирующего органа) - передаточная функция объекта в виде апериодического звена 1-го порядка:
 ;
; 
Заданная кривая разгона:
2 Построение математической модели объекта по экспериментальной переходной характеристике.
Построение математической модели линейной системы по экспериментальной переходной характеристике (кривая разгона) производится в следующем порядке:
1.На основании формы кривой разгона и в зависимости от физических свойств исследуемой системы устанавливается вид передаточной функции модели.
2.Определяются значения коэффициентов передаточной функции из условия наилучшего приближения модели к объекту.
3.Производится оценка точности аппроксимации.
Произведем расчет коэффициентов передаточной функции модели методом площадей Симою М.П.
Для расчета параметров модели методом площадей целесообразно ввести нормированную кривую разгона, определяемую формулой:

Предполагается, что порядок передаточной функции модели выбирается априорно, и задача расчета сводится к определению параметров модели. Зададимся следующими структурами передаточной функции модели:


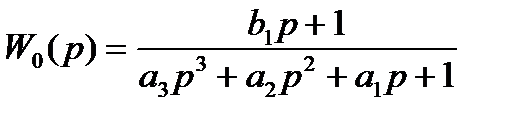

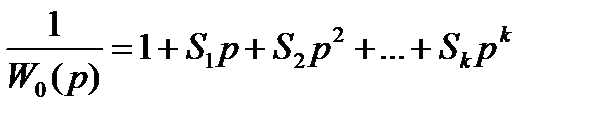
Выражение l/W0(p) - обратное передаточной функции модели, можно разложить в ряд по степени р:
Очевидно, что для модели (I):

для модели (II):
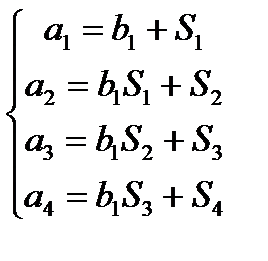
Для модели (III) коэффициенты b1, a1, a2, а3 связаны с коэффициентами S1, S2, S3, S4 системой уравнений:
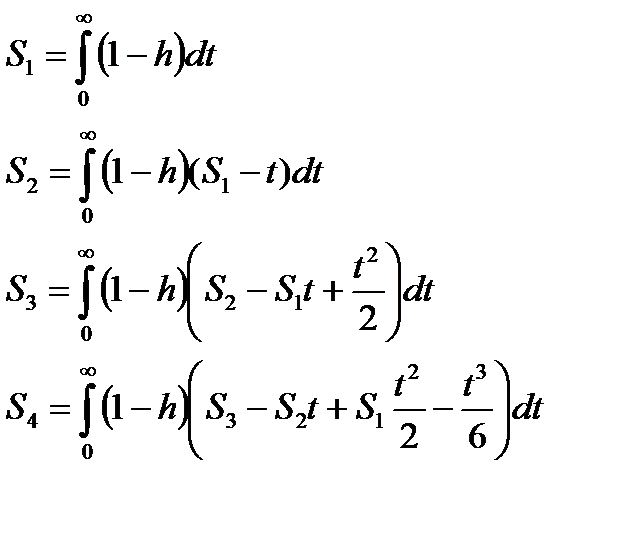
Коэффициенты S, связаны с переходной функцией h(t) соотношениями:
2.1 Расчет коэффициентов передаточной функции модели:

|
Таким образом, математическая модель переходной функции по каналу регулирования имеет вид:

|

|

|

|

|

|

|

|

|

|

|

|

|

|









