 2015-06-28
2015-06-28 312
312Автомати A1 = (S1, X1, Y1,d 1, l1, {s01}), A2 = (S2, X2, Y2,d 2, l2, {s02}) задані шістками. Вихід першого автомата з'єднаний безпосередньо з входом другого автомата, тобто Y1 = X2.
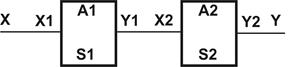
Рис. 20.2. Послідовне з'єднання автоматів
Визначення. Результуючим автоматом послідовного з'єднання двох автоматів A1 і A2 називається автомат A = (S, X, Y,d, l, {S0}), у якого
1. S = S1´ S2, тобто S = {sÎS| s= < s1, s2> & s1, ÎS1 & s2 Î S2 }.
2. X = X1.
3. Y1 = X2.
4. Y = Y2.
5. d: S´X®S і визначається в такий спосіб:
d(S´X) = (S´X) = (d(S1´X1), (d2(S2´X2)) чи d(S´X) = {s = d(s’, x)Îd(S´X)| s' = <s1’, s2’ > & s= <s1, s2> & x Î X & s1 = = d(s1’, x) & s2 = d2(s2’, l1(s1’, x)}.
6. l: S´X®Y і визначається так:
l(S´X) = (S´X) = l2(S2´l1(S1´X)) чи l(S´X) = {y=
=l(s’, x)ÎY| s' = <s1’, s2’> & xÎX & y = l2(s2’, l1(s1’, x))}.
7. s0 = <s01, s02>.
Приклад. Задані автомати Мілі A1 і A2 з попереднього прикладу.
Функція переходів результуючого автомата d:S´X®S
Таблиця 20.6
| S/S1´S2 X | s1 | s2 | s3 | s4 | s5 | s6 |
| s11s21 | s11s22 | s12s21 | s12s22 | s13s21 | s13s22 | |
| x1 | s1/s11s21 | s2/s11s22 | s2/s11s22 | s1/s11s21 | s4/s12s22 | s3/s12s21 |
| x2 | s5/s13s21 | s6/s13s22 | s5/s13s21 | s6/s13s22 | s3/s12s21 | s4/s12s22 |
Функція виходів результуючого автомата l:S´X®Y
Таблиця 20.7
| S/S1´S2 X | s1 | s2 | s3 | s4 | s5 | s6 |
| s11s21 | s11s22 | s12s21 | s12s22 | s13s21 | s13s22 | |
| x1 | y1/y11y21 | y2/y11y22 | y2/y12y21 | y3/y12y22 | y2/y12y21 | y3/y12y22 |
| x2 | y1/y11y21 | y2/y11y22 | y1/y11y21 | y2/y11y22 | y1/y11y21 | y2/y11y22 |
Початкові стани для A1 і A2 - s01 = s11 і s02 = s21, для А початковий стан – s1 = <s11, s21>








