 2015-06-28
2015-06-28 347
347Нехай задане послідовне з'єднання трьох автоматів A1, A2, A3, кожний з яких є заданий стандартною шісткою (рис. 26.4).
Нехай tз1 – затримка, що внесена dі, lі-функціями, тобто затримка спрацьовування деякого автомата Ai, тоді сигнал на виході A3 з'явиться не раніш, ніж через tз1+tз2+tз3 = 3tз після надходження вхідного сигналу на вхід A1. Якщо з'єднано послідовно n автоматів, то затримка може бути дорівнювати nt3 ³ Т, де Т – період (тривалість одного такту) роботи композиції, при цьому порушується функціонування yk(t) = l k(sk(t), x k(t)). Для уникнення цього використовується з'єднання з вихідною функцією.

Рис. 20.4. З'єднання автоматів з вихідною функцією
У з'єднанні з вихідною функцією як автомати використовуються так звані контекстні автомати, що задаються четвіркою A = (S, X, d, {S0}).
Визначення. Контекстний автомат чи напівавтомат – це автомат Мура, в якому забезпечена повнота виходів, тобто кожному внутрішньому стану відповідає свій оригінальний вихідний сигнал – існує взаємно однозначна відповідність алфавіту внутрішніх станів і вихідного алфавіту.
Приклад. Зв'язок напівавтоматів з вихідними сигналами
A1 = (S1, X, d 1,{s01})
A2 = (S2, X´Y1, d 2, {s02})
A3 = (S3, X´Y2, d 3, {s03})
A4 = ({s04}, X´Y1´Y2´Y3, d4(s04, X´Y1´ Y2´Y3))
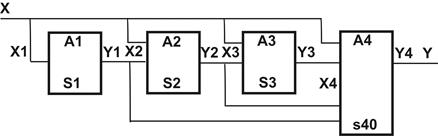
Рис. 20.5. З'єднання автоматів з вихідною функцією
Якщо в деякій момент часу t напівавтомати знаходяться відповідно в станах s01, s02, s03 і надходить вхідний сигнал x1, то вони одночасно починають перехід у такі стани:
s1(t+1) = d1(s1(t), x(t))
s2(t+1) = d2(s2(t), (s1(t), x(t)))
s3(t+1) = d3(s3(t), (s2(t), x(t))).
Вихідний сигнал з'єднання з вихідний функції дорівнює
y(t) = l4(x(t), s1(t), s2(t), s3(t)).
У результаті автомат може бути як автоматом Мілі, так і автоматом Мура. В другому випадку y(t) = l4(s1(t), s2(t), s3(t)), що змінить вхідний алфавіт X4 = Y1´Y2´Y3.
Таким чином, при збільшенні числа компонентних автоматів затримка першої реакції на виході не зростає.
Контрольні запитання
1. Яке з’єднання автоматів є рівнобіжним, які ще рівнобіжні з’єднання можна визначити?
2. Що є початковим станом і як визначаються функції переходів та виходів рівнобіжного з’єднання автоматів?
3. Яке з’єднання автоматів є послідовним?
4. Як визначаються функції переходів та виходів послідовного з’єднання автоматів?
5. Яке з’єднання автоматів є з'єднанням зі зворотним зв'язком?
6. Якім особливим умовам задовольняє з'єднання автоматів зі зворотним зв'язком?
7. Що може відбутися, якщо не виконати особливі умови з'єднання автоматів зі зворотним зв'язком?
8. Що є з'єднанням автоматів з вихідною функцією, що є напівавтоматом?
9. Чому може порушитися функціонування послідовного з'єднання
n автоматів, якщо nt3 ³ Т?
10. Якій час установлення стану усього з'єднання автоматів з вихідною функцією?
11. Чи може час установлення стану усього з'єднання автоматів з вихідною функцією вплинути на вихідну функцію?








