 2015-06-24
2015-06-24 624
624Для понимания кинематики с одной поворотной осью в option file, Kinematic Model может быть 4-Axis Head or 4-Axis Table.
Следующее - иллюстрация конфигурации с ротационной осью на голове:
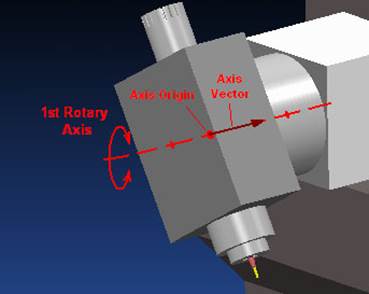
Чтобы настраивать эту конфигурацию, определите характеристики для одной поворотной оси и установите начальный вектор инструмента. На иллюстрации, ось направлена по линейной оси Y и так была бы Осью B

Направление (Direction) - вектор оси не должен быть коллинеарным (палаллельным) с начальным вектором инструмента, поскольку вращения вокруг оси не будут менять ориентацию инструмента.
Начальная точка (Origin) - ось вращения связана к точке на инструментальном патроне, где начинается инструмент. Синяя стрелка на схеме ниже,показывает как правильно определить начальную точку. Определяя начальную точку, гарантируйте, что все поворотные оси на станке - в нуле.
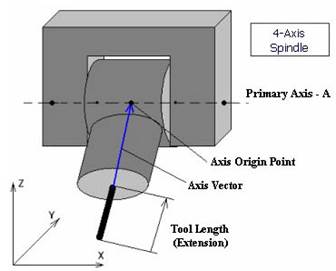
 Поворотная ось находится вдоль ось оси X. – ось А.
Поворотная ось находится вдоль ось оси X. – ось А.
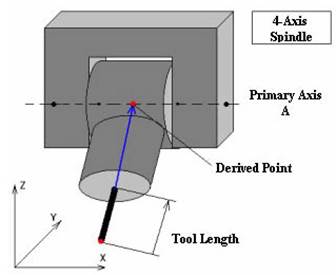
(полученная точка)
Если Постпроцессор не использует динамическую компенсацию для многоосевых перемещений, специальная точка, точкой поворота (Pivot Point), с координатами, отличными от положения вершины инструмента, используется преобразования перемещений в УП. В случае кинематики с 4 осями, точка поворота вычисляется через следующую формулу:
Pnc = Pcl + TL*TV + Delta(P)
где:
- Pnc = (точка поворота) pivot point
- Pcl = координаты вершины инструмента из CLDATA (tool tip coordinates from CLDATA)
- TL = длина инструмента (tool length)
- TV = текущий нормальный вектор инструмента (таким образом TL*TV - вектор инструмента, модуль которого равен длине инструмента) (current normal tool vector (so TL*TV is a tool vector whose module is equal to the tool length)).
Delta(P) Дельта (P) - вектор начальной точки(синяя стрелка на рисунке). Это зависит от текущего вращения вокруг главной оси(P) (primary axis). В этом случае точка поворота - то же самое как наклоненная начальная точка оси, но так бывает не всегда. Главное требование - то, что точка поворота не изменяет его местоположение в пространстве, когда станок вращается вокруг поворотных осей. Однако, Постпроцессор Delcam только поддерживает случаи, точки поворота лежат центра на поворотной оси как станочные настройки точки поворота таким образом.
Если Вы перемещаете начальную точку оси по этой оси, это не имеет никакого эффекта на местоположение оси в пространстве, таким образом, Вы можете всегда определять начальную точку, чтобы она совпала с точкой поворота.
Обычно есть больше чем один способ конфигурировать многоосевую обработку для управления станком (например, каждый должен полагать, использовать ли динамический или компенсация длины инструмента). Если станок поддерживает эту возможность, вариант должен быть выбран, где начальная точка оси не используется в вычислениях, таким образом координаты вершина инструмента, вернее чем точка поворота на выходе УП. В этом случае, Постпроцессор Delcam поддерживает динамическую компенсацию многоосевой обработки, и все начальные точки могут собираться ноль (0,0,0).








