2015-07-21
2015-07-21 365
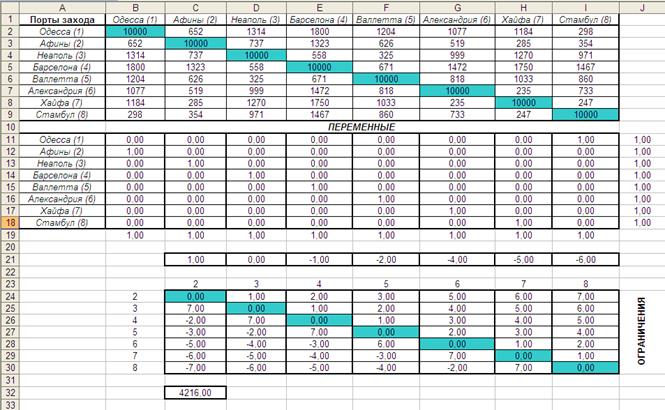
3651) Підготовка робочого аркуша EXCEL (рис. Ж.1).
Робочий аркуш складається з двох основних частин (рис. Ж.1):
ü Вхідні дані, що включають матрицю відстаней між портами заходу круїзного судна;
ü Вихідні дані, що включають значення цільової функції й оптимальний маршрут судна.

Рис. Ж.1. Підготовка робочого аркуша EXCEL для використання засобу «Пошук рішення»
2) В осередки В19:I19 введемо формули для розрахунку суми змінних по стовбцям:
| B | C | D | E | F | G | H | I | |
| =СУММ (B11:B18) | =СУММ (C11:C18) | =СУММ (D11:D18) | =СУММ (E11:E18) | =СУММ (F11:F18) | =СУММ (G11:G18) | =СУММ (H11:H18) | =СУММ (I11:I18) |
В осередки J11:J18 введемо формули для розрахунку суми змінних по рядкам:
| J | |
| =СУММ(B11:I11) | |
| =СУММ(B12:I12) | |
| =СУММ(B13:I13) | |
| =СУММ(B14:I14) | |
| =СУММ(B15:I15) | |
| =СУММ(B16:I16) | |
| =СУММ(B17:I17) | |
| =СУММ(B18:I18) |
В цільовий осередок С32 введемо формулу, що розраховує суму добутків двох масивів - вихідних даних (B2:I9) і змінних (B11:I18).
| С | |
| =СУММПРОИЗВ(B2:I9;B11:I18) |
В осередки С24:I30 (обмеження) введемо формули:
| C | D | E | F | G | H | I | |
| =$C$21-D21+8*D12 | =$C$21-E21+8*E12 | =$C$21-F21+8*F12 | =$C$21-G21+8*G12 | =$C$21-H21+8*H12 | =$C$21-I21+8*I12 | ||
| =$D$21-C21+8*C13 | =$D$21-E21+8*E13 | =$D$21-F21+8*F13 | =$D$21-G21+8*G13 | =$D$21-H21+8*H13 | =$D$21-I21+8*I13 | ||
| =$E$21-C21+8*C14 | =$E$21-D21+8*D14 | =$E$21-F21+8*F14 | =$E$21-G21+8*G14 | =$E$21-H21+8*H14 | =$E$21-I21+8*I14 | ||
| =$F$21-C21+8*C15 | =$F$21-D21+8*D15 | =$F$21-E21+8*E15 | =$F$21-G21+8*G15 | =$F$21-H21+8*H15 | =$F$21-I21+8*I15 | ||
| =$G$21-C21+8*C16 | =$G$21-D21+8*D16 | =$G$21-E21+8*E16 | =$G$21-F21+8*F16 | =$G$21-H21+8*H16 | =$G$21-I21+8*I16 | ||
| =$H$21-C21+8*C17 | =$H$21-D21+8*D17 | =$H$21-E21+8*E17 | =$H$21-F21+8*F17 | =$H$21-G21+8*G17 | =$H$21-I21+8*I17 | ||
| =$I$21-C21+8*C18 | =$I$21-D21+8*D18 | =$I$21-E21+8*E18 | =$I$21-F21+8*F18 | =$I$21-G21+8*G18 | =$I$21-H21+8*H18 |
3) На панелі інструментів відкриваємо Сервис à Поиск решения і у діалоговому вікні, що відкриється вводимо наступні значення і параметри:
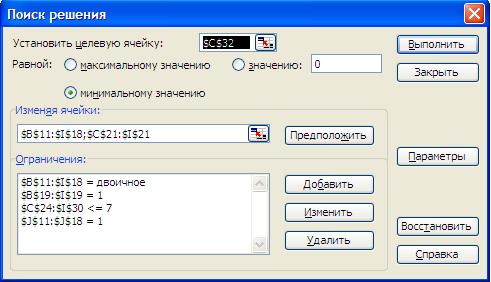
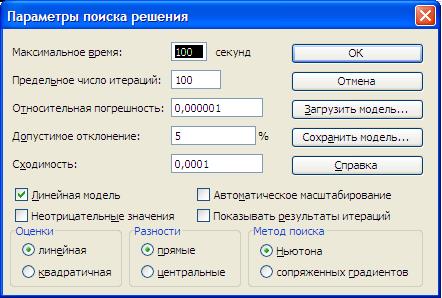
Натискаємо ОК і отримуємо значення цільової функції и оптимальний контур: