 2015-07-14
2015-07-14 4065
4065Из теории электрических машин известно, что, пренебрегая явнополюсностью ротора, электромагнитная мощность синхронного генератора
 (1)
(1)
где Е, U —соответственно э. д. с. и напряжение обмотки статора;
xd — синхронное индуктивное сопротивление обмотки статора;
q — угол между векторами э. д. с. и напряжения, а также между векторами м. д. с. обмотки статора и обмотки ротора в пространстве.
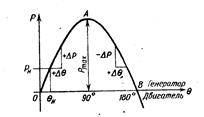
Эту зависимость называют угловой характеристикой синхронной машины (рис. 1). Ее часть, расположенная выше оси абсцисс, соответствует режиму работы генератором, а часть, расположенная ниже оси абсцисс, — режиму работы двигателем.
 | 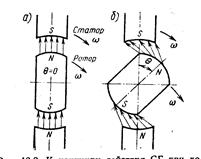 |
| Рисунок 27.1. Угловая характеристика синхронного генератора | Рисунок 27.2. Принцип действия СГ в режиме холостого хода (а) и под нагрузкой (б) |
При холостом ходе q = 0 (рис.27, а) механическая мощность, приложенная к валу генератора со стороны приводного двигателя, и электромагнитная мощность, отдаваемая генератором, также равны нулю. При увеличении подачи топлива (или пара) приводному двигателю генератора его ротор «забегает» вперед относительно статора на некоторый угол q, вызывая растяжение магнитных линий (рис.27, б). Генератор развивает электромагнитную мощность, равную (но противоположную по знаку) механической мощности на валу, и ротор продолжает равномерное вращение с прежней (синхронной) частотой. При номинальной нагрузке генераторов q =15 ¸ 30°. Дальнейшему повышению механической мощности на валу генератора (см. рис. 27.1) будет соответствовать увеличение угла на +D q и электромагнитной мощности генератора на + DР вплоть до угла q = 90°. При q = 90° увеличение механической мощности на валу вызывает увеличение угла на +D q и уменьшение электромагнитной мощности генератора на — DР. К ротору генератора будет приложена избыточная мощность, под действием которой угол q будет непрерывно увеличиваться. В результате магнитная связь между ротором и статором нарушается, и генератор переходит в асинхронный или двигательный режим работы с последующим отключением его защитой.
Таким образом, участок ОА кривой (см. рис. 27.1) соответствует устойчивой работе, а участок АВ — неустойчивой. Условие dP/dq >0 является условием статической устойчивости работы синхронного генератора.
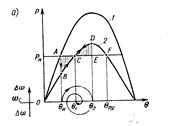
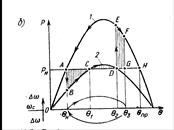
Динамическую устойчивость работы генераторов рассмотрим на примере мгновенного уменьшения напряжения в системе, когда генератор с угловой характеристики 1 переходит на работу в режиме, которому соответствует угловая характеристика 2 (рис. 27.3).
Точка А характеристики 1 соответствует работе генератора при номинальном напряжении, при котором угол q равен qн. При резком уменьшении напряжения в сети угол в вследствие инерции вращающихся масс ГА не может измениться мгновенно, а электромагнитный момент генератора резко уменьшится, т. е. точка А с характеристики 1 переместится в точку В характеристики 2 при q = qн. Мощность, отдаваемая генератором, уменьшится от Рн до P1, а мощность приводного двигателя Рп.д . сохраняется. Под действием разности мощностей Рп.д . — Р1 > 0 ротор генератора получит ускорение, его угловая скорость w будет расти (см. годограф угловой скорости на рис. 27.3) и угол q начнет увеличиваться.
В точке С наступит равенство мощностей генератора и приводного двигателя Рп.д=Рн, но из-за инерции ГА ротор генератора будет отклоняться до точки D. На участке CD мощность генератора больше мощности приводного двигателя Рп.д <Р, в результате чего ротор будет затормаживаться, его угловая скорость будет уменьшаться.
При угле q2 угловая скорость вращения ротору будет равна синхронной, и он начнет обратное движение, при этом угол q уменьшится. Совершив несколько качаний относительно угла q1, соответствующего точке С на кривой 2, ротор генератора прекратит колебательный процесс. Значение запасенной ротором кинетической энергии при переходе с кривой 1 на кривую 2 пропорционально площади S1 фигуры АВС. Наибольший угол q2, до которого отклоняется ротор, соответствует площади S2 фигуры CDE (площади замедления), равной площади S1 фигуры АВС (площади ускорения).
 |  |
| Рис. 27.3. Графики для определения динамической устойчивости работы СГ |
Очевидно, что предельным по динамической устойчивости углом качаний qпр для рассматриваемого случая является угол, соответствующий точке F, поскольку при больших углах мощность приводного двигателя будет снова превышать мощность генератора и угол достигнет 180°. При этом произойдет переход генератора в асинхронный или двигательный режим работы с последующим отключением защитой. Качания ротора в пределах угла от qн до qпр не вызывают нарушения динамической устойчивости, хотя qпр > 90°.
Если же при переходе с характеристики 1 на характеристику 2 (рис. 27.3.) площадь S1 фигуры АВС будет больше площади S2 фигуры CD, то для сохранения динамической устойчивости при угле q2 необходимо восстановить напряжение до первоначального значения. При этом работа генератора будет характеризоваться не точкой D характеристики 2, а точкой Е характеристики 1 и затем точкой F, после чего площадь S2 фигуры CDEFG будет равна площади S1 фигуры АВС и ротор начнет обратное движение к точке А (см. рис. 27.3, б) по пути F — Е — А.
Таким образом, динамическая устойчивость параллельной работы синхронных генераторов обеспечивается при условиях: 
 .
.
| 5. | Інтегральні середовища розробки програмного забезпечення мікропроцесорних управляючих систем. Склад і призначення окремих частин. |
Интегрированные системы разработки — программно-аппаратные системы,
предоставляющие возможность проведения программного проекта по всем
стадиям разработки — от создания исходного текста программы до отладки
программно-аппаратного комплекса.
В состав программного обеспечения интегрированных сред входят:
· редактор исходных текстов;
· транслятор;
· программная модель;
· размещающая программа;
· средства отладки программного обеспечения в реальных условиях эксплуатации;
· справочная подсистема.
С применением интегрированных сред возможно проведение интерактивной
отладки программы, функционирующей на микроконтроллерной системе.
При этом на инструментальной ЭВМ формируется управляющее воздействие программы. Использование внешних воздействий позволяет исследовать поведение программно-аппаратного комплекса без внесения каких-либо изменений в текст отлаживаемой программы (задание новых значений при инициализации, запуск управляющих подпрограмм в иной последовательности и т. п.).
В состав аппаратного обеспечения интегрированных систем разработки входят так называемые отладочные платы, представляющие собой аппаратные
платформы типовой конфигурации, в ряде случаев дополненные набором периферийных элементов (клавиатура, индикаторы и т. п.) и допускающие возможность установки пользовательских подсистем (устройств сопряжения и т. п.).
Интегрированная система разработки позволяет провести полный цикл проектирования системы, в результате которого формируется целевая микроконтроллерная система, способная функционировать в автономном режиме.
Интегрированные системы разработки некоторых фирм (в частности, система
Visual Micro Lab) позволяют проводить моделирование типовых элементов
систем управления (логических элементов, индикаторов, пассивных компонентов), подключенных к микроконтроллеру, тем самым повышая надежность разрабатываемого программного обеспечения.
В некоторых интегрированных системах (например, DavE— Digital Application Engineer) справочная подсистема обладает возможностью по командам пользователя, специфицирующим типовые режимы работы блоков микроконтроллера, автоматически генерировать фрагменты текста разрабатываемого программного обеспечения.
Интегрированные среды разработки выпускаются фирмами Keil, Tasking
Software и рядом других.

