 2015-07-14
2015-07-14 1023
1023От качества и надежности работы РЭП в значительной степени зависят безопасность плавания, а также технико-экономические показатели судов. Поддержание РЭП в работоспособном состоянии достигается грамотной технической эксплуатацией.
В состав РЭП входит множество элементов, показатели надежности которых неодинаковы. Ряд элементов (транзисторы, конденсаторы и т. п.), отказы которых носят внезапный характер, не обладают ремонтопригодностью и требуют замены после выхода из строя. Обнаружение неисправности здесь для неработающей системы возможно только путем периодических проверок.
Многие звенья подвержены влиянию физического старения, постепенно изменяют свои свойства во времени (износ, ухудшение сопротивления изоляции). Работоспособность таких элементов может быть восстановлена в процессе обслуживания, которое предусматривает замену и регулировку еще исправных узлов оборудования, достигших определенного возраста или степени изнашивания.
Характеристики распределения времени отказов аппаратуры РЭПявляются предметом изучения теории надежности. Значение таких характеристик позволяет обоснованно регламентировать обслуживания: периодичность и объем. осмотров, замен, периодичность проверок с целью контроля исправности оборудования и т. д.
С целью накопления материала все отказы оборудования регистрируют в специальных журналах с указанием характера отказа, времени наработки и т. п. Информация об отказах направляется с очередным рейсовым донесением судовладельцу, где ведется ее учет и анализ, вырабатываются конкретные рекомендации по обслуживанию, составу сменных и запасных частей и режиму их хранения.
Рулевой электропривод - система многократного действия. Продолжительность рабочих и нерабочих периодов определяется длительностью рейса и стоянок, являющихся в общем случае непостоянными.
Периодичность и общий объем обслуживания устанавливаются правилами технической эксплуатации электрооборудования. Наряду с этим следует учитывать также указания заводских инструкций, конкретизирующих нормативы и технологию операций по обслуживанию в зависимости от качества установленных приборов.
Для качественного обслуживания авторулевых электротехническому персоналу необходимо изучить техническую документацию, прилагаемую к каждому авторулевому.
Для рулевых электроприводов предусматривают специальные виды технического обслуживания. Еженедельно необходимо проводить наружный осмотр и проверять работу системы со всех управляющих постов.
Каждый месяц следует измерять сопротивление изоляции электрических машин, цепей питания, монтажных соединений.
Резиновые уплотнения смазывают специальной смазкой из смеси графита и касторового масла. Подтягивают крепеж агрегатов питания, приборов, проверяют состояние амортизаторов.
Один раз в полгода смазывают кинематические узлы в приборах, измеряют и регулируют контактные нажатия, промывают контакты. Одновременно проверяют наличие и состояние деталей ЗИП.
В процессе эксплуатации возникает необходимость в регулировании трех основных параметров авторулевого: коэффициента обратной связи, коэффициента сигнала тахогенератора и коэффициента усиления.
Изменение коэффициента обратной связи существенно отражается на каче
стве удержания судна на курсе: при полной загрузке судна этот коэффициент рекомендуется уменьшать, а при плавании с балластом увеличивать.
Коэффициент сигнала тахогенератора позволяет регулировать сигнал по скорости отклонения судна от курса. При ходе в тихую погоду его следует увеличивать, что повышает точность удержания судна на курсе. Вместе с тем это же способствует увеличению интенсивности работы рулевой машины, поэтому в свежую погоду сигнал тахогенератора необходимо уменьшать.
Коэффициент усиления системы изменяется регулятором «Грубо - Точно». Перевод регулятора из положения «Точно» в положение «Грубо» существенно снижает механическую нагрузку рулевой машины, незначительно ухудшая качество удержания на курсе. Поэтому рекомендуется при волнениях свыше 4-5 баллов «загрублять» чувствительность стабилизирующей системы.
Во время хода судна работа рулевого устройства проверяется электромехаником не менее двух раз в сутки.
При эксплуатации рулевого электропривода совместно с авторулевым необходимо руководствоваться следующим:
1. при следовании в узкостях, швартовке и выходе из порта рекомендуется использовать вид управления «Следящий» как наиболее удобный и экономичный;
2. в случае наличия неисправностей в следящих системах перейти на вид управления «Простой», который является резервным и позволяет выполнять все необходимые мероприятия по маневрированию судна;
3. при сложных маневрах судна для обеспечения надежности управления рекомендуется иметь в работе оба насоса, что при видах управления «Следящий» или «Простой» увеличивает скорость перекладки руля;
4. с целью уменьшения изнашивания РЭП переключатель чувствительности авторулевого в необходимых случаях устанавливать в положение «Грубо»;
5. для более равномерной эксплуатации оборудования рекомендуется при работе на одном насосе через каждые 12 ч переходить на другой насос (переключение следует проводить в момент времени, согласованный по телефону с вахтенным штурманом и по его приказанию).
При обнаружении неисправностей, требующих остановки рулевого электропривода, электромеханик докладывает вахтенному помощнику и вахтенному механику и в дальнейшем действует по их указанию.
4 Блок розподілу активних навантажень генераторів БРНГ. Схема, принцип дії.
Блок входит в состав СУ СЭЭС типа "Ижора-М" и предназначен для автоматического распределения активных нагрузок между параллельно работающими СГ. Работа блока начинается с момента включения АВ резервного генератора, т. е. сразу после окончания процесса синхронизации и продолжается в течение 8-38 с, после чего блок автоматически отключается при помощи реле времени. Таким образом; распределение нагрузок осуществляется только на время приема нагрузки резервным генератором. В дальнейшем распределение активных нагрузок выполняют АРЧ генераторных агрегатов.
Блок вырабатывает непрерывный или импульсный сигнал в зависимости от значения степени неравномерности DР распределения активных нагрузок, граничное значение которого DРгр может устанавливаться в пределах ±0,15, ±0,25, ±0,35Рном генератора. При DР > DРгр блок обеспечивает непрерывное включение серводвигателя резервного ГА, ускоряя процесс распределения нагрузок; при DР < DРгр - импульсное включение серводвигателя, что позволяет избежать перерегулирования
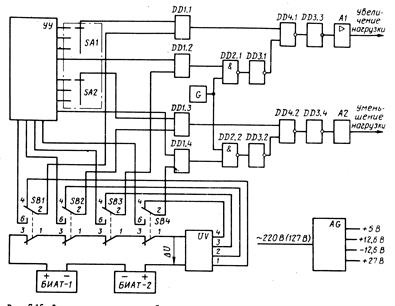
Рисунок 29.1 – Функциональная схема блока распределения активных нагрузок генераторов БРНГ
Элементной базой блока в основном являются микросхемы (логические элементы, генератор импульсов, усилитель и др.). В состав блока входят: узел уставки УУ с двухполюсным переключателем уставок SA1, при помощи которого задают указанные выше значения DРгр; двух-полюсные кнопки SB1-SB4 для контроля исправности блока; формирователь сигналов UV; компараторы DD1.1-DD1.4, представляющие сравнивающие устройства с аналоговым входом и дискретным выходом; логические элементы DD2.1, DD2.2 (И - НЕ), DD3.1-DD3.4 (НЕ), DD4.1, DD4.2 (ИЛИ - НЕ) и выходные усилители А1, А2. На выходах этих усилителей включены реле «увеличение нагрузки» и «уменьшение нагрузки».
Алгоритмы функционирования логических элементов:
элемент «И – НЕ» - если на всех без исключения входах логические единицы, на выходе логический 0; если хотя бы на одном входе 0, на выходе 1;
элемент «ИЛИ – НЕ» - если на любом входе 1, на выходе 0; если на всех без исключения входах 0, на выходе 1;
элемент «НЕ» - если на входе 1, на выходе 0; если на входе 0, на выходе 1.
Выходные усилители А1 и А2, не являясь собственно логическими элементами, реализуют логическую функцию «ДА» (повторение): если на входе 1, на выходе 1; если на входе 0, на выходе 0.
Питание элементов блока обеспечивает узел питания АG, на вход которого подается напряжение 220 В (127 В) частотой 50 Гц, а с выхода снимаются напряжения: не стабилизированное +27 В и стабилизированные +5, +12,6 и -12,6 В.
После включения на шины резервного генератора (обозначим резервный генератор СГ2, а базовый генератор – СГ1) выходы блоков измерителей активного тока БИАТ-1 и БИАТ-2 обоих генераторов соединяются последовательно. Поэтому при неодинаковых активных нагрузках генераторов через контакты 3-1 кнопок SB1-SB4 на вход формирователя UV подается напряжение DU, пропорциональное степени неравномерности активных нагрузок генераторов. С выходов 1-4 формирователя через контакты 4-2 кнопок SB1-SB4 напряжения Uф поступают на нижние входы компараторов DD1.1-DD1.4. Из узла уставок УУ на верхние входы этих компараторов подаются напряжения уставок Uуст, причем на входы компараторов DD1.2 и DD1.4 непосредственно, а на DD1.1 и DD1.3 через переключатель уставок SA1.
Принцип действия компаратора основан на сравнении двух входных напряжений: уставки Uуст и формирователя Uф. На выходе компаратора устанавливается логический 0 при Uуст > Uф и логическая 1 при Uуст < Uф. Напряжение уставки компаратора DD1 I (DD1.3) выше, чем DD1.2 (DD1.4). Схемы компараторов построены на операционных усилителях типа К1УТ401Б.
Предположим, что активная нагрузка СГ1 больше, чем СГ2. Напряжение Uф на входе формирователя UV имеет полярность напряжения на выходе блока БИАТ-1. При этом на выходах 2, 4 формирователя напряжение Uф = 0, а на выходах 1, 3 напряжение Uф пропорционально степени неравномерности активных нагрузок. Таким образом, на нижние входы компараторов DD1.3 и DD1.4 напряжения с формирователя не поступают. Поэтому на выходах этих компараторов будут логические нули, вследствие чего становится невозможным включение реле «уменьшение нагрузки». С выходов 1, 3 формирователя напряжение Uф поступает на нижние входы компараторов DD1.1 и DD1.2. Уровень сигналов (0 или 1) на выходах компараторов DD1.1 и DD1.2 зависит от степени неравномерности нагрузок генераторов.
Если степень неравномерности нагрузок DР > DРгр, а такое возможно сразу после включения СГ2 на шины, когда вся нагрузка находится на СГ1, то на выходах компараторов DD1.1 и DD1.2 будут логические единицы. С выхода компаратора DD1.1 логическая 1 поступает на верхний вход элемента DD4.1. Поэтому на его выходе будет логический 0, поступающий на вход элемента DD3.3. С выхода элемента DD3.3 логическая 1 поступает на вход усилителя А1, в результате реле «увеличение нагрузки» работает непрерывно.
По мере перевода нагрузки на СГ2 степень неравномерности нагрузок уменьшается до заданного переключателем SA1 граничного значения DРгр. В этом случае на входе компаратора DD1.1 напряжение формирователя уменьшается до значения Uф < Uуст, поэтому на выходе элемента DD1.1 устанавливается логический 0. Однако уменьшение напряжения на входе элемента DD1.2 недостаточно для изменения состояния DD1.2, поэтому на выходе элемента DD1.2 сохраняется логическая 1, поступающая на верхний вход элемента DD2.1. В промежутки времени, когда генератор импульсов G выдает сигнал в виде логической 1, на оба входа элемента DD2.1 поступают логические единицы, вследствие чего на его выходе будет логический 0. В результате на выходах элементов DD3.1 - логическая 1, DD4.1 - логический 0, DD3.3 - логическая 1. На выходе усилителя А1 включается реле «увеличение нагрузки». При снятии сигнала генератора G на выходе усилителя А1 устанавливается логический 0, упомянутое реле отключается. Таким образом, реле «увеличение нагрузки» включается в такт сигналам генератора импульсов G.
При уменьшении степени неравномерности нагрузки до некоторого минимального значения DPmin (обычно DPmin £ Рном) на выходе компаратора DD1.2 устанавливается логический 0. В этом случае на выходах элементов устанавливаются следующие сигналы: DD2.1 - логическая 1, причем импульсы генератора G не изменяют состояние этого элемента; DD3.1 - логический 0; DD4.1 - логическая 1; DD3.3 - логический 0. Реле «увеличение нагрузки» отключается.
Исправность БРНГ проверяют при помощи кнопок SB1-SB4. Нажатие любой из них приводит к снятию напряжений Uф со входов компараторов DD1.1-DD1.4 вследствие размыкания контактов 3-1 нажатой кнопки и подаче на вход соответствующего компаратора сигнала из узла уставок УУ через замыкающие контакты 2-6 этой кнопки. Для получения непрерывного (импульсного) сигнала на выходе усилителя А1 нажимают кнопку SB1 (SB3), на выходе усилителя А2 - кнопку SB2 (SB4).
5 Засоби налагодження мікропроцесорних управляючих систем.
Отладка программ заключается в проверки правильности работы программы
и аппаратуры. Программа, не содержащая синтаксических ошибок, тем не
менее, может содержать логические ошибки, не позволяющие программе выполнять заложенные в ней функции. Логические ошибки могут быть связаны
с алгоритмом программы или неправильным пониманием работы аппаратуры, подключенной к портам микроконтроллера.
Интегральные системы программирования имеют в своём составе встроенный отладчик, который может работать либо на основе эмуляции поведения микроконтроллера без подключения реальной аппаратуры, либо путём взаимодействия с реальной аппаратурой микропроцессорной управляющей системы через встраиваемый в современные микроконтроллеры блок отладки. Первый подход позволяет отладить те участки кода программы, которые не зависят от работы аппаратуры, не входящей в состав микросхемы микроконтроллера. Второй требует некоторых затрат на модуль согласования стандартного интерфейса персонального компьютера (как правило USB) с интерфейсом отладочного модуля микроконтроллера (JTAG или фирменным) зато позволяет отслеживать происходящие в системе процессы полном объёме в ходе её реального функционирования.
Для отладки программ обычно применяют три способа:
· пошаговая отладка программ с заходом в подпрограммы;
· пошаговая отладка программ с выполнением подпрограммы как одного
оператора;
· выполнение программы до точки останова.
Пошаговая отладка программ заключается в том, что выполняется один оператор программы, затем контролируются те переменные, на которые должен
был воздействовать данный оператор.
Если в программе имеются уже отлаженные подпрограммы, то подпрограмму
можно рассматривать как один оператор программы и воспользоваться вторым способом отладки программ.
В окнах интегральной системы программирования можно контролировать содержимое любых участков памяти микроконтроллера, его портов и внутренних регистров. Для контроля переменных можно воспользоваться окном Watch. В большинстве случаев это намного выгоднее, чем использовать просмотр памяти данных. Переменные в этом окне отображаются в том формате, в котором они были объявлены в программе. Для добавления переменной в окно Watch достаточно щелкнуть правой кнопкой мыши по переменной в окне отладчика программ.
Использование точек останова позволяет пропускать уже отлаженную часть
программы. Точка останова устанавливается в местах, где необходимо проверить содержимое переменных или просто проконтролировать, передается ли управление
данному оператору. Иногда возникает необходимость однократно пропустить часть операторов. В этом случае можно воспользоваться кнопкой выполнения программы до курсора. При нажатии на эту кнопку программа будет выполняться до тех пор, пока управление не будет передано оператору, на котором находится курсор.
Билет 8
Билет 8
2 Регулювання кутової швидкості асинхронного двигуна переключенням числа пар полюсів.








