 2015-05-13
2015-05-13 4601
4601Значительное место в ГСП занимает аналоговая ветвь постоянного тока, состоящая из регулирующих, корректирующих и функциональных блоков, построенных по модульному принципу невыполненных на полупроводниковых и магнитных элементах, а также из вторичных регистрирующих приборов и исполнительных устройств.
Система «Каскад». Центральную часть электрической аналоговой ветви ГСП составляет система «Каскад», рассчитанная на работу с выпускаемыми отечественной промышленностью измерительными приборами с унифицированными выходными сигналами постоянного тока 0 – 5 и 0 – 20 мА. Система приборов «Каскад» применяется при автоматизации технологических процессов в различных отраслях промышленности, время протекания которых составляет от 0,2 до 2000 с. К особенностям системы можно отнести преимущественное использование в линиях связи между блоками токового сигнала 0 – 5 мА, блочно-модульное исполнение, использование современных высоконадежных элементов, малые габаритные размеры, расширение функциональных возможностей.
Применение сигнала 0 – 5 мА повышает помехоустойчивость и метрологические показатели системы, позволяет использовать аппаратуру в АСУ (совместно с системами централизованного контроля) и в комбинированных системах регулирования, строить каскадные схемы регулирования с вводом корректирующих воздействий и перекрестных связей.
Система «Каскад» может быть использована для построения аналоговых моделей, работающих в реальном масштабе времени и включенных в иерархическую структуру управления, а также для автоматизации экспериментов. Систему образуют группы измерительных, алгебраических, логических, нелинейных и регулирующих блоков, динамических преобразователей, задающих, усилительных и вспомогательных устройств.
Линейные аналоговые регулирующие устройства формируют управляющее воздействие Y упр в виде непрерывного сигнала, изменяющегося во времени по определенному закону. В преимущественном большинстве случаев такие регуляторы в своей структуре имеют усилитель 1, охваченный звеном 2 обратной отрицательной связи (рис. 3.60). При достаточно большом коэффициенте усиления k ус усилителя с передаточной функцией
W ус(p) = k ус и передаточной функцией звена обратной связи W oc(p) передаточная функция усилителя, охваченного отрицательной обратной связью, будет
W ус.ос(р) = W ус(p)/(1 + W ус(p)·Wос(р)) =
= K ус/(1 + K ус· W ос(р)) ≈ 1/ W ос(р),
т.е. передаточная функция регулятора будет определяться в основном передаточной функцией звена обратной связи.
Если звено 2 обратной связи имеет коэффициент передачи K ос = x ос/ Y упр и выполнено из RC -элементов, соединенных как это изображено на рис. 3.60, то передаточная функция регулятора будет
 ,
,

Таким образом, регулятор формирует ПИД-закон управления. Производя переключения в схеме звена обратной связи, можно получить другие законы управления. Так, например, при отключении с 2, т.е. с 2 = 0, получим k p = 1/ k ос, T д = 0, T и = c 1 R 1, т.е. регулятор формирует ПИ-закон управления с передаточной функцией
Если дополнительно при с 2 = 0 закоротить перемычкой конденсатор с1, т.е. с 1→∞, получим 1/ Т и p → 0 и регулятор будет, формировать П-закон управления, с передаточной функцией W p(p) = k p.
С помощью переключений и изменения номиналов R 1, C 1, R 2 и C 2 можно устанавливать время интегрирования в пределах
Т и = 1 ¸ 3000с, дифференцирования Т д = 0,2 ¸ 300с, коэффициент пропорциональной части k p = 0,3 ¸ 100.
Рис. 3.60
Регулирующие блоки Р25 применяют для управления технологическими процессами при автоматизации котельных установок, насосных и компрессорных станций. Входными величинами блоков могут быть сигналы от дифференциально-трансформаторных датчиков, термометров сопротивления, термоэлектрических и реостатных преобразователей, а также унифицированные сигналы постоянного тока и напряжения.
В качестве исполнительных устройств в комплекте с регуляторами применяют исполнительные механизмы с магнитными усилителями или с реверсивными магнитными пускателями, имеющими напряжение на управляющих катушках 24 В. Блоки могут непосредственно управлять электродвигателями (мощностью до 80 ВА) различных установок. Модификации блока Р25 различаются числом и типом датчиков, которые могут быть подключены к входу, а также видом электрических входных сигналов.
Конструктивно блок Р25 выполнен в стандартном металлическом корпусе, содержащем два самостоятельных функциональных узла (субблока): измерительный Р-012 (Р-013 для подключения термоэлектропреобразователей) и электронный Р-011. Стабилизированный источник питания регулятора позволяет получать с высокой точностью напряжения ±15 В; ±8 В и ±9 В для измерительного и электронного субблоков.
Упрощенная принципиальная электрическая схема субблока Р-012 (рис. 3.61) содержит суммирующую часть и нормирующий операционный усилитель (стабилизированный источник питания, цепи подключения датчиков положения, индикаторов рассогласования, напряжения задания и положения исполнительного устройства на рисунке не показаны).
Рис. 3.61. Упрощенная принципиальная схема субблока Р-012
Термопреобразователи сопротивления ТС1 и ТС2 получают питание от делителей напряжения R1, R2 и R3, R4. Термопреобразователи вместе с резисторами R3, R6, R14 и R15 образуют электрическую мостовую схему с диагональю «зажим 9 субблока и общая точка (ОТ)». Второй мост с диагональю «зажим 15 субблока и ОТ» образуют корректор R к, задатчик R з и резисторы R8–R12. Нормирующий ОУ имеет такое соотношение R o.c./ R13, при котором изменению сигнала на входе от 0 до максимального значения соответствует выходное напряжение на зажиме 14 Р-012 от 0 до ±10 В.
Задатчик R з позволяет изменять напряжение в диагонали моста на ±20 % от максимальной. Для установки задания в любой точке диапазона измерения служит корректор R к. Напряжение, поступающее в измерительный мост с TC1 и ТС2, может быть использовано полностью или частично с помощью переменных резисторов R3 и R6, осуществляющих умножение входных сигналов на коэффициенты соответственно K 2 и K 3, изменяющиеся от 0 до 1.
Напряжение на выходе ОУ будет равно нулю, если алгебраическая сумма U TC1 K 2 + U TC2 K 3 + U з + U к = 0, где U TC1, U TC2 – сигналы термопреобразователей; U з и U к – сигналы соответственно задатчика и корректора. Если равновесие измерительного блока нарушится из-за изменения температуры в местах установки ТС1 или ТС2, то между зажимами 9 и 15 субблока возникнет напряжение определенной полярности и на выходе Р-012 (зажим 14) появится напряжение 0 ¸ ±10 В, которое называют напряжением отклонения или рассогласования.
Напряжение отклонения поступает на зажим 23 субблока
Р-011 (рис. 3.62) и через демпфер R дф, С дф на вход ОУ1. Демпфер предназначен для сглаживания сигналов, изменяющихся с большой скоростью, и для фильтрации высокочастотных помех. Постоянную времени демпфера можно изменять от 0 до 10 с резистором R дф.
При этом на выходе ОУ1 появится напряжение, соответствующее знаку входного напряжения, и включит один из усилителей трехпозиционного электронного реле, собранного на ОУ2 и ОУ3. Одновременно с напряжением отклонения на входы ОУ2 и ОУ3 с движка переменного резистора R з «Зона» подается постоянное напряжение смещения.
При напряжении отклонения, меньшем, чем напряжение смещения, операционные усилители остаются в нейтральном положении.
Рис. 3.62. Упрощенная принципиальная схема субблока Р-011
При появлении U вых на одном из усилителей электронного реле срабатывает фазочувствительный генератор импульсов (на схеме не показан) и на выходе одного из транзисторов VT1 или VT2 появляются усиленные по мощности последовательные импульсы, которые после трансформатора преобразуются одним из мостов (M1 или М2) в постоянное напряжение, поступающее в зависимости от полярности напряжения отклонения на зажим 9 или 7 блока Р25. Одновременно выходное напряжение трехпозиционного реле через резистор R16 или R17 поступает на вход ОУ4 и далее на узел формирования сигнала обратной связи, созданный на базе ОУ5. Входное напряжение ОУ5 будет определено положением подвижного контакта резистора K П63. В момент срабатывания трехпозиционного реле транзисторный ключ K (на рисунке принципиальная схема ключа не приведена) отключает резисторы R20 и R21 от общей точки ОТ, и тогда ОУ5 превращается в интегратор с конденсатором обратной связи С о.с. При этом U вых ОУ2 будет изменяться с постоянной скоростью до тех пор, пока U o.c не станет равным С откл., ОУ1 не окажется в равновесии и напряжение на конденсаторе С о.с. не будет равно выходному напряжению ОУ5.
При U oткл. = U o.c электронное реле установится в нейтральное положение и его U вых будет равно нулю. При этом транзисторный ключ К соединит с ОТ резисторы R21, R20 и подвижный контакт резистора «T и плавно», конденсатор С о.с. начнет разряжаться и выходное напряжение ОУ5 будет изменяться по экспоненте. Когда разность U o.c и U oткл. будет больше зоны нечувствительности реле, на его выходе снова появится управляющий сигнал, который начнет перемещать исполнительное устройство до тех пор, пока U o.c снова не станет равным U oткл., после чего цикл повторится.
Усилитель ОУ1 и позиционное реле будут находиться постоянно в равновесии в случае, если U oткл. = 0, т. е. когда сумма сигналов датчиков на входе Р-012 будет точно равна заданному значению.
Таким образом, при отклонении U вх от заданного значения исполнительный механизм сначала переместится на расстояние, зависящее от значения U oткл. и положения движка резистора K П63, а затем через определенные промежутки времени (паузы) будет перемещаться импульсами в ту же сторону до исчезновения U oткл. Длительность пауз между повторными импульсами изменяют плавно резистором «T и плавно» или скачком при подсоединении параллельно резистору R20 резистора R21. В последнем случае общее сопротивление цепи разряда конденсатора С о.с. уменьшится, соответственно уменьшится и пауза между импульсами.
Длительность импульса изменяют добавкой к U o.c на входе ОУ1 напряжения смещения. Для этой цели служит переменный резистор R д. Верхнему положению его подвижного контакта соответствует максимальное напряжение смещения и минимальная длительность импульса.
Рассмотренный порядок работы блока Р25 в комплекте с исполнительным механизмом постоянной скорости соответствует ПИ-закону регулирования.
При необходимости регулирующий блок может обеспечить работу АСР с позиционным законом. Для этого предназначен переключатель S1, который шунтирует С о.с. и резисторы R20, R21.
С помощью переключателя S2 обеспечивается третий режим работы блока – ручной. В этом режиме выходные зажимы 10, 9 и 7 отключают переключением S2 от Р-011. Затем от ручного задатчика с помощью переключателя S3 подают напряжение на зажимы 10 и 7 или 10 и 9. При этом будут загораться соответственно светодиоды VД1 («Меньше») или VД2 («Больше»).
Органы настройки блока и гнезда, предназначенные для измерения напряжений в характерных точках, выведены на лицевую панель (рис. 3.63). Слева на панели помещены органы управления субблока Р-012: ручки резисторов масштабирования 1, корректора 2 и подстройки шкалы указателя положения 4, а также профильный индикатор отклонения 3.
Справа на панели управления субблока Р-011 расположены ручки подстроечных резисторов 5 для изменения зоны нечувствительности, длительности импульса и коэффициента усиления K П63. Светоиндикаторы указывают направление перемещения ИМ. Переключателем 7 изменяют закон регулирования блока, а переключателем 8 – постоянную времени интегрирования T и. Время демпфирования устанавливают ручкой 9. В гнездах e, ОС и ОТ можно измерить U oткл. и U o.c. В нижней части панели расположены переключатели режимов работы 10 («ручной – автомат») и направления движения ИМ 11, индикатор 12 задания и ручка 13 задатчика. Значения K П63, T и, «Импульс», нанесенные на соответствующие шкалы, рассчитаны из условия, что время перемещения исполнительного устройства из одного крайнего положения в другое 63 с.
Рис. 3.63. Блок Р25 – передняя панель:
1, 2, 4, 5, 9 – ручки переменных резисторов, 3, 12 – индикаторы,
6 – светоиндикаторы, 7, 8, 10, 11 – переключатели, 13 – ручка задатчика
3.3.4. Цифровые и микропроцессорные
регулирующие устройства
В качестве примера цифрового регулирующего устройства рассмотрим универсальный программный ПИД-регулятор ТРМ151 фирмы ОВЕН, который предназначен для построения автоматических систем контроля и управления производственными технологическими процессами в различных областях промышленности. Прибор ТРМ151 (структурная схема одной из разновидностей ТРМ151-01 приведена на рис. 3.64) представляет собой регулятор, который может работать как в режиме ПИД, так и в режиме двухпозиционного регулирования (ON/OFF). Регулирование в ТРМ151 осуществляется по программе технолога.
Рис. 3.64. Структурная схема ТРМ151-01
Прибор ТРМ151 выполняет следующие основные функции:
измерение физических величин, контролируемых входными первичными преобразователями;
цифровую фильтрацию для уменьшения влияния на результат измерения промышленных импульсных помех;
коррекцию измеренных величин для устранения погрешностей первичных преобразователей;
отображение результатов измерений на встроенном светодиодном четырехразрядном цифровом индикаторе;
регулирование измеренных физических величин по ПИД или двухпозиционному закону;
изменение уставок регулируемых величин по заданной технологической программе;
формирование аварийного сигнала при обнаружении неисправности первичных преобразователей с отображением его причины на цифровом индикаторе;
отображение на встроенном светодиодном цифровом индикаторе текущих значений параметров технологической программы и мощности, подаваемой на исполнительный механизм;
формирование команды ручного управления исполнительными механизмами и устройствами с клавиатуры прибора;
передача в сеть RS-485 текущих значений любых измеренных или вычисленных величин, а также выходного сигнала регулятора и параметров программы технолога;
изменение значений программируемых параметров прибора с помощью клавиатуры управления на его передней панели;
изменение значений параметров с помощью компьютерной программы-конфигуратора при связи с компьютером по RS-485;
сохранение заданных программируемых параметров в энергонезависимой памяти при отключении напряжения питания ТРМ151.
Канал регулирования предназначен для регулирования одной физической величины (температуры, давления и т. д.) по результатам измерения одним датчиком.
Для регулирования в Канале используется исполнительный механизм (ИМ) типа «нагреватель», который позволяет увеличивать значение регулируемой величины (например, ТЭН). Управление ИМ производится при помощи выходного элемента, выбранного пользователем при заказе (электромагнитное реле, оптотранзистор, оптосимистор, ЦАП).
ПИД-регулятор выдает аналоговое значение выходной мощности, направленное на уменьшение отклонения текущего значения регулируемой величины от уставки.
При управлении ИМ типа «нагреватель» значение выходной мощности находится в диапазоне от «0» до «1» (или от 0 до 100 %).
При работе с выходным элементом типа ЦАП выходная мощность преобразуется в пропорциональный ей ток или напряжение.
При работе с выходным элементом дискретного типа выходная мощность преобразуется в ШИМ-сигнал, для которого необходимо задать период следования импульсов.
Прибор ТРМ151 имеет встроенный сетевой интерфейс RS‑485, который предоставляет следующие основные возможности:
конфигурирование прибора с персонального компьютера;
регистрация на ПК параметров текущего состояния.
Прибор имеет энергонезависимую память, в которой сохраняются программируемые параметры прибора. Параметры хранятся в памяти в течение нескольких десятков лет.
Прибор ТРМ151 изготавливается в пластмассовом корпусе, предназначенном для утопленного монтажа на вертикальной плоскости щита управления электрооборудованием (модификация корпуса Щ1) или для настенного монтажа (модификация корпуса Н).
Внешний вид лицевой панели ТРМ151 представлен на рис. 3.65.
Рис. 3.65. Лицевая панель прибора ТРМ151
На лицевой панели прибора имеются следующие элементы индикации и управления: четыре цифровых светодиодных индикатора (ЦИ1...ЦИ4); 10 светодиодов; 6 кнопок.
В качестве входных устройств к регулятору могут подключаться различные датчики, например: температуры (термосопротивления, термопары); давления и т.д.
Для ослабления влияния внешних импульсных помех на эксплуатационные характеристики прибора в программу его работы введена цифровая фильтрация результатов измерений. Фильтрация осуществляется независимо для каждого канала.
Прибор ТРМ151 может выпускаться в нескольких модификациях, например:
ТРМ151-01 (рис. 3.66) содержит 2 канала пошагового регулирования по измеренной величине, каждый канал подключен к своему выходному элементу. Регулятор может работать в режимах ПИД и ON/OFF;
Рис. 3.66
ТРМ151-03 (рис. 3.67) осуществляет одноканальное пошаговое регулирование задвижкой с датчиком положения или без;
Рис. 3.67
ТРМ151-04 (рис. 3.68) осуществляет одноканальное пошаговое регулирование по измеренной или вычисленной величине. Имеется блок контроля нахождения величины в допустимых границах (инспектор). Сигнал от инспектора подается на выходной элемент 2, к которому подключается средство аварийной сигнализации (лампа, звонок и т. д.);
Рис. 3.68
ТРМ151-05 (рис. 3.69) осуществляет одноканальное пошаговое регулирование, при этом уставка регулятора может быть скорректирована по определенной функции от значения, измеренного на входе 2. Имеется блок инспектора, соединенный с ВЭ2;
Рис. 3.69
ТРМ151-06 (рис. 3.70) осуществляет одноканальное пошаговое регулирование задвижкой без датчика положения. При этом уставка регулятора может быть скорректирована по определенной функции от значения, измеренного на входе 2;
Рис. 3.70
ТРМ151-07 (рис. 3.71) осуществляет одноканальное пошаговое регулирование по измеренной или вычисленной величине. Эта величина дублируется на ЦАП 4…20 мА, к которому подключается аналоговый регистратор;
Рис. 3.71
ТРМ151-08 (рис. 3.72) осуществляет одновременное пошаговое регулирование температуры и влажности. Вычисление влажности производится психрометрическим методом по температуре «сухого» и «влажного» термометров;
Рис. 3.72
ТРМ151-09 (рис. 3.73) осуществляет одноканальное пошаговое регулирование по измеренной или вычисленной величине. На второй выход прибора можно на определенном шаге программы подать периодические импульсы для включения дополнительного оборудования или сигнализации о ходе технологического процесса;
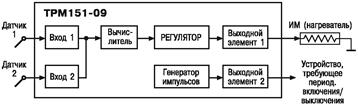
Рис. 3.73
ТРМ151-10 (рис. 3.74) осуществляет одноканальное пошаговое регулирование с помощью системы «нагреватель – холодильник» по измеренной или вычисленной величине.
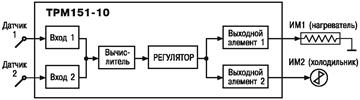
Рис. 3.74
Способы цифрового и микропроцессорного управления объектами автоматического управления будут также рассмотрены в последующих главах.
СПИСОК ЛИТЕРАТУРЫ
1. Эрастов В.Е. Метрология, стандартизация и сертификация.– М.: Форум – Инфра – М, 2008.
2. Сигов А.С. Метрология, стандартизация и сертификация.– М.: Форум – Инфра – М, 2007.
3. РОСС RU.0001.010001. Положение о Системе сертификации ГОСТ Р.
4. РОСС RU.0001.000100. Правила по проведению сертификации в РФ.
5. ГОСТ Р 40003-2000 ГСИ. Система сертификации ГОСТ Р. Регистр систем качества. Порядок проведения сертификации систем качества и сертификации производств.
6. ИСО 10012-1. Требования, гарантирующие качество измерительного оборудования.
7. ИСО/МЭК 45. Руководящее положение по представлению результатов испытаний.
8. Автоматизация производственных процессов текстильной промышленности: Учебник в 5 книгах: Кн. 1. / Под ред. Д.П.Петелина. – М.: Легпромбытиздат, 1992.
9. Новицкий П.В., Зограф И.А. Оценка погрешностей результатов измерений. – 2-е изд., перераб. и доп. – Л.: Энергоатомиздат. Ленингр. отд-ние, 1991.
10. Электрические измерения неэлектрических величин: Учеб. пособие / Под ред. П.В. Новицкого: – 5-е изд., перераб. и доп. – Л.: Энергия, 1975.
11. Раннев Г.Г. Методы и средства измерений: Учебник / Г.Г. Раннев, А.П. Тарасенко. – М.: Издательский центр «Академия», 2003.
12. Коновалов Л.И., Петелин Д.П. Элементы и системы электроавтоматики: Учеб. пособие. – М.: Высшая школа, 1986.
13. Волоконно-оптические датчики/ Т. Окоси, К. Окамото, М. Оцу и др.: Пер. с япон.– Л.: Энергоатомиздат. Ленингр. отд-ние, 1990.
14. Бриндли К. Измерительные преобразователи: Справочное пособие: Пер. с англ.– М.: Энергоатомиздат, 1991.
15. Бусурин В.И., Носов Ю.Р. Волоконно-оптические датчики: Физические основы, вопросы расчета и применения.– М.: Энергоатомиздат, 1990.
16. Оптоэлектронные первичные преобразователи на базе световодной техники. А.Б. Козлов, Ю.Н. Королев, Ю.Д. Румянцев и др:. Монография. – М.: МГТУ им. А.Н.Косыгина, 2009.
17. Козлов А.Б., Ермаков А.А. и др. Микропроцессорный инфракрасный оптоэлектронный преобразователь плотности волокнистого материала.//Изв. вузов. Технология текстильной промышленности. 1995, №2, №4.
18. Средства автоматического контроля параметров технологических процессов текстильного производства /В.И.Киселев, Н.А. Кобляков, Ю.В. Курланов и др.; – М.: Легпромбытиздат, 1990.
19. Браммер Ю.А., Пащук И.Н. Импульсная техника: Учебник. – М.: ФОРУМ: ИНФРА-М, 2005.
20. Новожилов О.П. Основы цифровой техники / Учеб. пособие. – М.: ИП РадиоСофт, 2004.
21. Токхайм Р. Микропроцессоры: Курс и упражнения/ Пер. с англ.. Под ред. В. Н. Грасевича. – М.: Энергоатомиздат, 1987.
22. Микропроцессорные системы контроля и управления в текстильной промышленности. Учеб. пособие / Под ред. А. Б. Козлова. – М.: МГТУ им. А. Н. Косыгина, 2004.
23. Микропроцессорные системы автоматического управления/ В.А. Бесекерский, Н.Б. Ефимов, С.И. Зиатдинов и др. – Л.: Машиностроение. Ленингр. отд-ние, 1988.
24. Туманов М.П. Технические средства автоматизации и управления: цифровые средства обработки информации и программное обеспечение: Учеб. пособие. – МГИЭМ. – М.: 2005.
25. Кузнецов А. Genesis for Windows – графическая SCADA-система для разработки АСУ ТП. // Современные технологии автоматизации. 1997, №3.
26. Автоматизация технологических процессов в текстильной промышленности: Учеб. пособие/ Д.П. Петелин, А.Б. Козлов, А.Р. Джелялов, и др. – М.: Легкая индустрия, 1980.
27. Курсовое и дипломное проектирование по автоматизации производственных процессов: Учеб. пособие / Под ред. И. К. Петрова. – М.: Высшая школа, 1986.
28. Кенио Т. Шаговые двигатели и их микропроцессорные системы управления: Пер. с англ. – М.: Энергоатомиздат, 1987.
29. Герман-Галкин С.Г. Силовая электроника: Лабораторные работы на ПК. – СПб.: КОРОНА принт, 2002.
30. Герман-Галкин С.Г. Компьютерное моделирование полупроводниковых систем в MATLAB 6.0: Учеб. пособие. – СПб.: КОРОНА принт, 2001.








