 2014-02-12
2014-02-12 4767
4767Позиционные регуляторы работают по принципу «включено-выключено». Их реализация осуществляется, например, с помощью контактных и бесконтактных релейных элементов.
Позиционные регуляторы бывают двух-, трех- и многопозиционными.
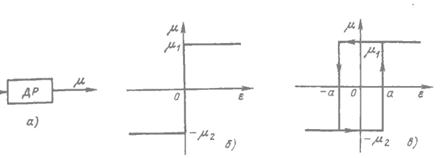 |
Рис.7. Структурная схема (а) и статические характеристики без зоны нечувствительности (б) и с зоной нечувствительности (в) двух позиционного регулятора; ДР — двухпозиционный регулятор
На рис. 7 приведены структурная схема и статические характеристики двухпозиционных регуляторов. Двухпозиционные регуляторы настраиваются таким образом, чтобы значения m и e отсчитывались в приращениях от условного равновесного состояния объекта регулирования, соответствующего расчетным значениям m0 и e0, принятым за начало отсчета. При этом статическая характеристика двухпозиционного регулятора без зоны нечувствительности примет вид, представленный на рис. 7 б, с зоной нечувствительности–на рис. 7 в.
 | |||
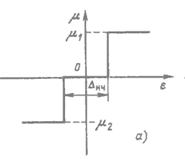 | |||
Рис. 8. Статические характеристики трехпозиционных регуляторов без зон нечувствительности (а) и с зонами нечувствительности (б)
Аналитическая статическая характеристика двухпозиционного регулятора без зоны нечувствительности запишется в виде:
m=m1 при e>0;
m=-m2 при e<0, (2.2)
а с зоной нечувствительности–в виде
m=m1 при e ³ а;
m=-m2 при e≤- а;
m=m1 при - а <e< а и de/dt <0;
m=-m2 при - а <e< а и de/dt>0. (2.3)
Из (2.2) и (2.3), а также из рис. 7, б и в следует, что двухпозиционные регуляторы постоянно оказывают на объект регулирования воздействия, отличные от их значений, необходимых для равновесного состояния системы (при e=0). В результате этого автоматическая система с двухпозиционным регулятором будет работать в автоколебательном режиме в окрестностях ее равновесного состояния.
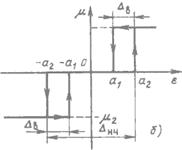
На рис.9 дан пример структурной схемы многопозиционного регулятора и его статических характеристик без зон неоднозначности и с зонами неоднозначности.
Из структурной схемы на рис.9, а многопозиционного регулятора следует, что его можно представить как несколько двухпозиционных регуляторов с различными установками их срабатывания, соединенными последовательно.
Отклонение регулируемой величины от заданного значения ε поступает на входы всех двухпозиционных регуляторов. Основной двухпозиционный регулятор ДРо срабатывает при изменении знака ε. Например, при ε > 0 регулятор ДРо срабатывает и на его выходе появляется регулирующий сигнал μо. Если этого регулирующего воздействия оказывается недостаточно и отклонение продолжает возрастать, то при ε Δg1>0 срабатывает регулятор ДР1б и на выходе многопозиционного регулятора появляется дополнительное регулирующее воздействие μ 1б. Результирующее воздействие на выходе будет равно μ=μо+μ1Б. В общем случае таких дополнительных регуляторов может быть несколько и при возрастании ε результирующее регулирующее воздействие может быть равно
где n – число двухпозиционных регуляторов ДРIБ, включившихся при возрастании ε.
Если при очередном включении i -го двухпозиционного регулятора отклонение ε начнет уменьшаться, то регуляторы поочередно в обратной последовательности начнут отключаться.
Аналогично работает многопозиционный регулятор при отклонении ε в обратную сторону, т.е. при ε<0.
Результирующее воздействие многопозиционного регулятора при этом будет равно
где m – число двухпозиционных регуляторов ДР jM, включившихся при уменьшении ε в сторону ε<0.
Статическая характеристика многопозиционного регулятора без зон нечувствительности составляющих двухпозиционных регуляторов представлена на рис.9, б, а при наличии зон неоднозначности – на рис.9, в.
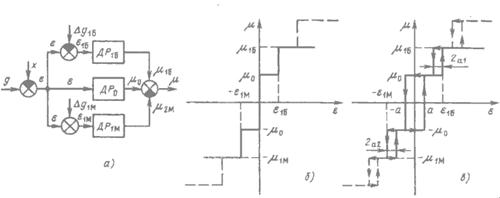 |
Рис. 9. Пример структурной схемы (а) и статических характеристик без зон неоднозначности (б) и с зонами неоднозначности (в) многопозиционного регулятора
Лекция 7
ПРОЕКТИРОВАНИЕ ПОЗИЦИОННЫХ
И СЛЕДЯЩИХ СИСТЕМ ПЕРЕМЕННОГО ТОКА








