 2015-07-14
2015-07-14 1116
1116Рассмотрим механизм произвольного класса и порядка с несимметричными звеньями, у которого входное звено ОА1 вращается с некоторой номинальной скоростью w1 и находится под действием движущего момента МДВ (рис.9.9). К выходному звену  механизма приложена сила
механизма приложена сила  полезного сопротивления
полезного сопротивления
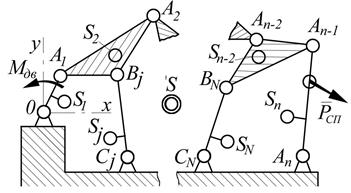
Рис.9.9
Пусть k звеньев механизма образуют кинематические пары со стойкой. Заменим действие стойки на k звеньев механизма силами реакций  .
.
Полученную систему подвижных звеньев механизма будем рассматривать как свободную, находящуюся под действием движущего момента МДВ и сил ,  и
и  , где
, где  – сила тяжести i -го звена, а n – число подвижных звеньев механизма (рис.9.10).
– сила тяжести i -го звена, а n – число подвижных звеньев механизма (рис.9.10).
Центр S массы этой системы будет двигаться под действием сил , и как материальная точка, масса которой равна массе подвижных звеньев механизма:
 , (9.6)
, (9.6)
где mi – масса i -го звена.
По второму закону Ньютона
 (9.7)
(9.7)
Но по закону равенства действия и противодействия сила, приложенная к станине механизма, равна:
 (9.8)
(9.8)
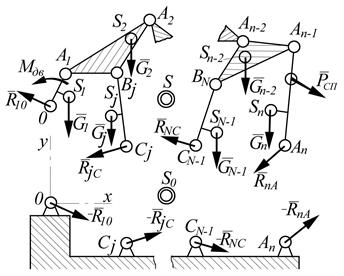
Рис. 9.10
Из выражений (9.7) и (9.8) получим
 (9.9)
(9.9)
Таким образом, в общем случае неуравновешенная сила, действующая на станину механизма произвольного класса и порядка, равна геометрической сумме внешних сил, приложенных к звеньям механизма, и произведения со знаком минус массы mS всех подвижных звеньев механизма на ускорение  центра масс всей системы.
центра масс всей системы.
Так как весь механизм состоит из n подвижных звеньев, то
где  – вектор ускорения центра i -го звена;
– вектор ускорения центра i -го звена;
mi – масса i -го звена.
Формула (9.9) принимает вид:
 (9.10)
(9.10)
Определим момент сил, действующих на станину механизма, используя теорему об изменении кинетического момента механической системы:
 (9.11)
(9.11)
где: JS и e – момент инерции и угловое ускорение подвижных звеньев кинематической цепи механизма относительно оси, проходящей через центр масс S, перпендикулярно к плоскости xOy;
 ,
,  , и
, и  – моменты сил ,
– моменты сил ,  ,
,  , относительно оси, проходящей через центр масс S системы.
, относительно оси, проходящей через центр масс S системы.
По закону равенства действия и противодействия на станину механизма будет действовать момент опорных реакций относительно оси S:
 (9.12)
(9.12)
Из выражений (9.11) и (9.12) получим:
 (9.13)
(9.13)
Последнее слагаемое выражения (9.13) можно представить в виде алгебраической суммы
 ,
,
где JSi и ei – момент инерции и угловое ускорение i -го подвижного звена механизма относительно оси, проходящей через его центр масс Si, перпендикулярно к плоскости xOy;
n – число подвижных звеньев механизма;
mi и  – масса i -го звена и ускорение его центра масс Si;
– масса i -го звена и ускорение его центра масс Si;
 – плечо вектора
– плечо вектора  относительно центра S массы m S, принятого за центр приведения сил.
относительно центра S массы m S, принятого за центр приведения сил.
Формула (8) примет вид:
 (9.14)
(9.14)
Таким образом, приходим к заключению: систему сил , действующих в кинематических парах на станину механизма произвольного класса и порядка (рис.9.10), можно заменить главным вектором (9.10) и главным моментом (9.14) этих сил так, как показано на рис.9.11. При этом точка приведения S0 принадлежит станине и совпадает в данный момент с центром S масс механической системы.
Сила Q и момент MQ являются в общем случае переменными по величине и направлению. Поэтому они вызывают вынужденные колебания станины.
Силовое воздействие является также одной из причин колебаний подвижного состава при движении его по рельсовому пути [9].
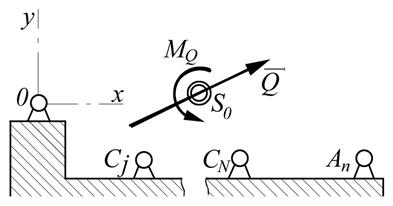
Рис.9.11
Так как железнодорожный путь в общем случае состоит из отдельных рельсов, соединенных в стыках накладками, то при движении по нему колесных пар всегда имеет место соударение колес с рельсами.
Рассмотрим схематически этот процесс. Изгибная жесткость накладок, соединяющих концы рельсов, меньше изгибной жесткости одного рельса, поэтому прогиб пути в стыке под нагрузкой всегда больше прогиба в средней части рельсового звена. Если колесо движется со скоростью  , то оно в последний момент движения по рельсу №1, не доходя до его конца, начинает вращения вокруг точки A как вокруг мгновенного центра вращения; при этом вектор скорости
, то оно в последний момент движения по рельсу №1, не доходя до его конца, начинает вращения вокруг точки A как вокруг мгновенного центра вращения; при этом вектор скорости  направлен перпендикулярно линии АО (рис.9.12).
направлен перпендикулярно линии АО (рис.9.12).
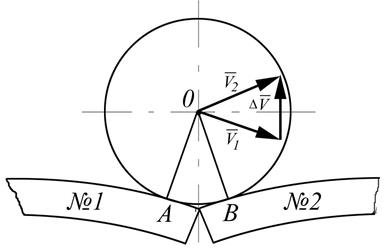
Рис. 9.12
В момент контакта колеса в точке В мгновенный центр вращения сразу же скачком (за время dt) перемещается в точку В и вектор скорости колеса  получает направление,
получает направление,
перпендикулярное линии ОВ.
Таким образом, колесо мгновенно изменяет скорость с на , т.е. изменение скорости равно вектору
 (9.15)
(9.15)
Если масса колеса равна m, то значит за отрезок времени dt количество движения колеса изменится на величину  .
.
Из теоретической механики известно, что изменение количества движения тела за время dt равно импульсу сил, сообщенному телу за то же время,
т.е.
 (9.16)
(9.16)
где S(t) – мгновенный ударный импульс;
Р – сила, возникающая при этом импульсе.
Таким образом, в стыке всегда возникает дополнительная динамическая сила Р, передаваемая и пути и подвижному составу. Для локомотива или вагона она является источником возникновения колебаний, а для пути – источником повышения просадок шпал в балласте.
В результате возникновения этих просадок продольный профиль пути приобретает вид, показанный на рис.9.13
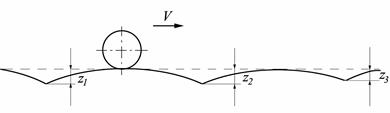
Рис. 9.13
При таком продольном профиле пути колесо вынуждено неравномерно во времени перемещаться в пространстве, что приводит к силам инерции колеса, передаваемым через связи колеса с тележкой другим элементам подвижного состава и пути. Силы инерции также способствуют возникновению колебаний подвижного состава при движении его по рельсовому пути.
Вопросы для самоконтроля:
1.Как определить в общем случае неуравновешенную силу, действующую на станину механизма?
2.Как определить неуравновешенный момент сил, действующий на станину механизма?
3. Что вызывают силы, возникающие при соударении колеса подвижного состава с рельсом?








