 2015-08-21
2015-08-21 2679
2679В основе этого класса моделей лежит концепция системной динамики, ориентированная на моделирование систем и процессов на высоком уровне агрегирования, где отображения отдельных элементов процессов, т.е. их дискретности, становится ненужным (например, экономика отдельных стран и регионов, транспортные системы страны, и т.п., проблемы мирового развития). В основе концепции системной динамики лежит представление о функционировании системы, как совокупности потоков информации, энергии, промышленной продукции, денежных средств и т.п.
Математической (формальной) основой методов системной динамики являются дифференциальные модели, в которых используются представления динамических процессов в пространстве состояний. Модели такого вида -это системы дифференциальных уравнений:
Х ' = f (x, u, t), где (4.5.1)
 — вектор состояний;
— вектор состояний;
х 1,..., xт — переменные состояния;
 — вектор входов;
— вектор входов;
t — символ времени (в дальнейшем для краткости t опускается).
Дифференциальные модели, применяемые в математической теории систем, включают кроме уравнений (4.5.1), называемых уравнениями состояния, еще и уравнение:
y = H (х, u), (4.5.2]
в котором переменная у = (y 1,..., yq) т – вектор выходов моделируемых процессов.
При составлении дифференциальных моделей производится выбор переменных состояния, и устанавливаются связи между этими переменными в виде функций правых частей уравнений состояния. Как правило, сформулировать такие зависимости только с использованием переменных состояния бывает очень трудно. Более продуктивным оказывается другой подход, основанный на детальном описании цепочек причинно-следственных связей между факторами, отображаемыми в модели с помощью переменных состояния.
Модели системной динамики разрабатываются на основе предоставляемых экспертами сведений об объектах исследования и в зависимости от целей изучения этих объектов. При построении моделей указанные сведения подвергаются тщательному анализу, в ходе которого находятся решения двух основных взаимосвязанных вопросов: выбора и интерпретации переменных состояния модели; выявления причинно-следственных отношений между переменными состояния и описания этих отношений в форме структурированных функциональных зависимостей вида f и H. По мнению экспертов, динамика состояний моделируемого объекта зависит от ряда факторов. Эксперт анализирует цепочки причинно-следственных связей этих факторов, которые должны обязательно учитываться при описании динамики состояний моделируемого объекта. А далее технология процесса структуризации информации о проблеме позволяет структурировать функции fи H.
В качестве общей структурной схемы при описании вектор-функций f (х, u) можно использовать граф, вершинам которого соответствуют переменные модели, а дугам непосредственные функциональные связи между этими переменными. Поясним на примере (рис.4.5.1.), о каких графах идет речь.
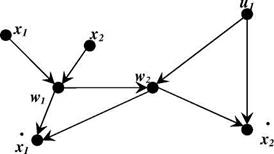
Рисунок 4.5.1 — Граф функциональных зависимостей переменных дифференциальной модели.
Требуется описать структуру правых частей уравнений состояния:
 ;
;
 .
.
После факторизации правых частей этих уравнений были получены структурирующие соотношения вида:
 ;
;
 ;
;
 ;
;
 .
.
Этому случаю будет соответствовать граф непосредственных функциональных зависимостей между переменными, представленный на рисунке 4.5.1. Данный граф имеет четырехъярусную структуру:
| Вершины графа | Ярусы графа |
x 1, x 2, u 1 w 1 w 2  |
Структуры правых частей уравнений дифференциальных моделей всегда могут быть представлены многоярусными графами, не имеющими контуров. Разработка таких цепочек причинно-следственных связей потребовала введения некоторых дополнительных переменных. Обозначим через w = (w 1,..., wS) твекторную переменную, компоненты которой образуют в совокупности множество включаемых при структуризации правых частей уравнений состояния (4.5.1) дополнительных переменных.
Алгоритмические формы записи дифференциальных моделей системной динамики имеют следующие характерные особенности:
Общая схема построения структур правых частей уравнений состояния этих моделей могут быть представлены в виде графовых представлений следующим образом:
Вершины таких графов образуют какой-то один ярус графа: нулевой ярус образуют вершины, отображающие на графе переменные состояния и входные переменные модели;
последний ярус (с наибольшим номером) составляют вершины, представляющие на графе переменные левых частей уравнений состояния (4.5.1);
вершинам всех промежуточных ярусов соответствуют переменные состояния и дополнительные переменные дифференциальной модели.
Нормативной схемой решения уравнений в моделях системной динамики является одношаговая схема первого порядка. Уравнения состояния моделей составляются в форме разностных уравнений вида:
 .
.
Здесь h -шаг дискретизации, a t = 0, 1, 2,...
Рассмотрим содержание базовой концепции структуризации.
Говоря в целом о методах разработки моделей системной динамики, их можно охарактеризовать как способы структуризации дифференциальных моделей, базирующиеся на концепции потоковой стратификации систем.
В общей структуре моделей системной динамики выделяются две части:
I - "Сеть потоков":
Отметим, что переменные состояния и переменные скорости изменения состояния (соответственно уровни и темпы в терминах системной динамики), определяющие состояние модели, задаются в сети потоков системами разностных уравнений и в описании присутствуют в неявном виде.
II - "Сеть информации":
С помощью неё осуществляется структуризация функциональных зависимостей, иначе дается структурированное представление функции f(xt,ut).
Это как бы основные образы моделируемых процессов в системной динамике.
Поясним сначала первую составляющую этой структурной схемы. 4.5.2 Основные понятия. Потоковая стратификация.
Как описывается динамика объекта моделирования в виде потоковых сетей?
Модель рассматривается в качестве сети потоков материальных ингредиентов модели. Каждая компонента этой сети соответствует какой-то одной совокупности однородных ингредиентов (например, предметы труда, население, денежные средства и т. п.), динамика которых учитывается в модели.
Например, рассматривая предприятие, с позиций системного подхода, в основе него можно выделить совокупность таких потоков, как финансовые, материальные, людские (кадры), потоки оборудования и др. (рис. 4.5.2).
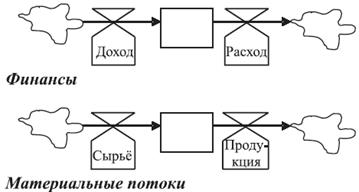
Рисунок 4.5.2 — Потоки на предприятии.
Сеть имеет узлы и дуги.
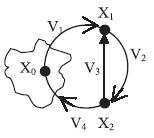
Узлы компонент сети потоков (за исключением нулевого узла) изображают наиболее существенные с точки зрения разработчиков модели состояния выделенных ингредиентов, а дуги сети задают возможные переходы их элементов из одного состояния в другое (рис. 4.5.3).
Распределение элементов по состояниям меняется с течением времени. Эти изменения для системной динамики являются нормативными образами моделируемых процессов.
В качестве характеристик распределения элементов входящих в модель ингредиентов по состояниям Х 1,..., Хт рассматриваются переменные х 1 ,..., хm уравнений состояния модели. Переменные v1.., vn принимаются за характеристики интенсивностей (скоростей), с которыми совершаются переходы элементов из состояния в состояние по дугам V 1,..., Vn сети.
Узлы сети изображаются в виде прямоугольников (рис. 4.5.4а). На рисунке 4.5.4 б использованы специальные символы потоковых сетей. В моделях системной динамики нуль сети принято обозначать специальным знаком "Озеро".
 | 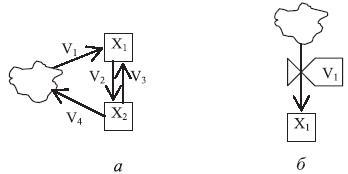 |
| Рисунок 4.5.3 - Сеть потоков | Рисунок 4.5.4- Основные символы потоковых сетей: а - узлы сетей; б - потоковая дуга с символом темпа. |
Такая интерпретация напоминает структурные формы задания автоматных моделей дискретных процессов. Однако модели системной динамики —это дифференциальные модели, переменные состояния которых непрерывны. Поэтому приведенной здесь структурной концепции уравнений состояния моделей системной динамики обычно дается более естественное объяснение, основанное на гидравлической интерпретации потоковых сетей.
В этой интерпретации каждый узел Xi Î Х сети рассматривается как резервуар, уровень наполнения которого в момент t равен xi (t), t=1,2,..., т. Дуги Vi Î V сети соответствуют потокам жидкости между резервуарами. Они указывают направление потоков, темпы которых характеризуются объемными расходами жидкости
vj (t), j = 1, 2,..., п на интервале времени [ th, (t + 1)× h ]. Темпы потоков символически изображаются в виде вентилей на дугах потоковых сетей (рис. 4.5.4 б).
Наглядность гидравлической интерпретации обусловила ее важную роль при структуризации моделей, специальную "потоковую" терминологию и общую трактовку математических схем моделей системной динамики.
В соответствии с терминологией системной динамики переменные состояния
х 1,..., хm называются уровнями модели, а переменные v,..., vn — темпами. Уровни и темпы — основные переменные моделей. Все остальные переменные, называются вспомогательными (или дополнительными). Вспомогательные переменные, как мы уже знаем, используются при структуризации функциональных зависимостей f темпов от уровней и входов, а также функциональных зависимостей Н выходов у от уровней х и входов u.
Таким образом, получается следующая картина при описании динамической системы: моделируемые процессы отображаются в виде некоторой фиксированной структуры, состоящей из накопителей — уровней, соединенных взаимосвязанными потоками, которые, перетекая по всей системе, изменяют значение уровней. Уровни характеризуют возникающее накопление внутри системы и являются величинами, которые определяются как переменные состояния системы (например: для банка -это сальдо, для склада -текущий уровень запасов на складе). Уровни описывают величины, непрерывные по диапазону значений, но дискретные во времени. Потоки изменяют значение уровней. В экономике, производстве потоками можно управлять. Потоки регулируются управленческими решениями, которые можно определить как скорости изменения потоков, т.е. темпы. Темп показывает, как изменяются уровни за интервал времени, равный шагу моделирования. Темп характеризует динамику моделируемой системы (попробуйте остановить систему: уровни будут значимы, а темпы неразличимы).
Потоковые сети являются неявной формой описания состояний системы, основных переменных модели — переменных состояния и скоростей изменения состояний, — в форме разностных уравнений. Основные переменные модели: уровни, темпы, вспомогательные (или дополнительные) описываются с помощью следующих разностных уравнений:
Уровень — переменная, закон изменения которой во времени выражается конечно-разностными уравнениями:
 , где (4.5.3)
, где (4.5.3)
t — модельное (системное) время;
h —изменение (приращение) времени —шаг моделирования (интегрирования);
х (t), x (t +h) — значение уровня в моменты времени;
V (t) — скорость изменения уровня, т.е. величина его изменения за единицу времени.
Уровнями имитируют такие характеристики моделируемой системы, которые определяют ее состояние в конкретный момент времени.
Темп -это переменная, равная скорости изменения уровня. В (4.5.3) V (t) является темпом. Закон изменения темпа задается функциональной зависимостью:
 , где (4.5.4)
, где (4.5.4)
t– модельное (системное) время;
V (t) — темп на момент времени t;
F — произвольная функция от k -аргументов;
pi(t) — любые переменные (уровни, темпы, дополнительные переменные), значения которых в момент t известны.
Темп характеризует динамику моделируемой системы.
Вспомогательные переменные введены для описания сложных функциональных зависимостей, их можно использовать для более удобной записи уравнений темпов.
 , где (4.5.5)
, где (4.5.5)
t – модельное (системное) время;
W (t) — значение вспомогательной переменной на момент t;
рi (t) — любые переменные, значения которых на момент t известны;
F’– некоторая произвольная функция k - аргументов.
Алгоритм имитации, таким образом, реализуется на основе этих разностных уравнений следующим образом:
Устанавливаются параметры системного времени (начальное значение, шаг интегрирования, длина интервала моделирования), задаются начальные условия (значения уровней в начальный момент системного времени);
По уравнениям (4.5.4), (4.5.5) на данный момент системного времени t рассчитываются значения всех темпов и вспомогательных переменных; t + h, системное время увеличивается на шаг моделирования (интегрирования); по уравнениям (4.5.3) рассчитываются значения всех уровней на данный момент системного времени; и т.д. выполняются итерации по этой схеме, пока не пройдет весь интервал моделирования.
Информационная сеть. Вернемся к общей структурной схеме моделей системной динамики, ко II составляющей структурных схем моделей системной динамики — информационной сети.
Структуризация функциональных зависимостей f и H завершается построением информационной сети модели. Подобно структурированным описаниям вектор-функций дифференциальных моделей, рассмотренных вначале, описания информационных сетей в моделях системной динамики представляют собой многоярусные графы. Ясно, что такие графы легко построить, если уравнения модели уже известны. Для сложных слабоструктурированных систем такие уравнения, как правило, не известны. В моделях системной динамики большая роль отводится эксперту. Модели создаются путем структуризации экспертной информации. Поэтому используется подход, основанный на анализе цепочек причинно-следственных связей факторов, подлежащих, по мнению экспертов, обязательному учету при описании динамики состояний моделируемого объекта. Вспомогательные переменные главным образом используются для построения логически ясных, хорошо интерпретируемых структур взаимосвязей переменных, с помощью которых в моделях отображаются представляемые экспертами разнородные сведения об объекте моделирования.
Рассмотрим общую схему структуризации информации о причинно-следственных взаимосвязях динамических процессов в объектах моделирования:
модели системной динамики разрабатываются на основе представляемых экспертами сведений об объектах исследования в форме вербального описания; эксперты проводят анализ и выявление всех факторов, необходимых для описания динамики состояний моделируемого объекта (выбираются и интерпретируются переменные состояния модели). При построении моделей проводится тщательный анализ этих сведений;
выявляются причинно-следственные отношения между переменными, для этого детально описываются цепочки причинно-следственных связей между факторами, отображаемыми в модели с помощью переменных состояний;
описываются эти переменные в структурированном виде с помощью графовых представлений (это требует введения вспомогательных переменных);
результатом являются структурированные описания вектор-функций
правых частей уравнения состояний.
Таким образом, в моделях системной динамики реализуется удобная и простая схема сбора и формализации информации, получаемой от эксперта в процессе построения моделей. Модели системной динамики используют графическую технику при структуризации экспертной информации о проблеме.

