 2015-08-21
2015-08-21 737
737Видеостраница #1 (рисунок 7) отражает вышеуказанную информацию, относящуюся к процессу обработки.
Воспроизведение значений осей следует понимать по-разному в зависимости от состояния системной переменной UCV (назначается с клавиатуры): UCV = 0; = 1; = 2; = 3; = 4. Значение переменной соответствуют вычисленному значению, значению датчиков, ошибке рассогласования, остатку пути со знаком направления движения, значению датчика относительно активного цикла детали.
Состояние системы определяется следующей информацией:
- IDLE - система в ожидании команды;
- RUN - система выполняет кадр или УП;
- HOLD - работа системы приостановлена;
- WAIT - система в ожидании;
- RUNH - система выполняет движения и функции, допустимые при приостановке работы системы;
- RESE – сброс;
- ERRO – ошибка;
- INP – система в ожидании ввода с клавиатуры;
- нажата кнопка «Пуск»;
- нажата кнопка «Стоп».
Группа вспомогательных команд:
- ESE – номер кадра, подлежащего выполнению последним;
- URT – угол поворота плоскости;
- URP – угол поворота детали;
- UCV – описана выше (UCV =0...4).
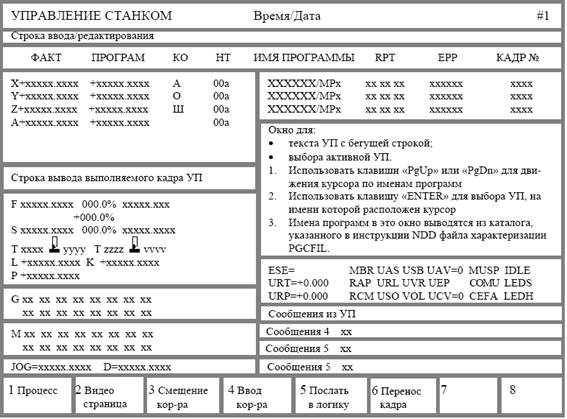
Рисунок 7 - Топология видеостраницы #1
Группа команд, изменяющих свой цвет в соответствии с их состоянием 0/1 (жёлтый цвет соответствует состоянию «1»):
- UAS – 0/1 – соединённые / несоединённые оси;
- UVR – 0/1 – подача / быстрый ход;
- USB – 0/1 – запрет исполнения / исполнение кадров с символом «/» (пропуск);
- URL – 0/1 – неуправляемый /управляемый режим быстрого хода (G00), заданный корректором ручной подачи;
- RAP – 0/1 – ручной / автоматический возврат на профиль;
- USO – 0/1 – запрет / разрешение выполнения МО 1;
- VOL – 0/1 – запрет / разрешение управления штурвалом;
- UEP – 0/1 – разрешение/запрет скоростной компенсации;
- RCM – запомненный поиск.
Группа состояний системы, изменяющая свой цвет при активации:
- MUSP – ожидание включения станка;
- COMU – разрешение движения осей;
- CEFA – разрешение отработки вспомогательных функций.
Обозначение элементов системы и некоторых показателей:
- Х+ХХХХХ.ХХХХ – имя оси, текущее значение и запрограммированная величина;
- КО – тип оси;
- О – ордината;
- А – абсцисса;
- Ш – ось шпинделя;
- НТ – активные начальные точки осей;
- ХХА – номер абсолютной начальной точки;
- ХХВ – номер временной начальной точки;
- ХХН - начальная точка по приращениям;
- F – подача (текущая, программная и разность в процентах);
- S – скорость вращения шпинделя (текущая, программная, разность в процентах);
- Т – инструмент в шпинделе;
- – активный корректор;
- Т –инструмент в носителе;
- – следующий корректор;
- L – корректор длины инструмента:
- К – корректор диаметра инструмента;
- Р – индексная ось;
- G – активизированные G- функции;
- М – вспомогательные функции;
- JOG - заданное перемещение в режиме «MANJ»;
- D - невыполненное расстояние, заданное «JOG»;
- RPТ – уровень и число оставшихся повторов;
- ЕРР – номер кадра, содержащего ЕРР команду; КАДР № – номер выполняемого кадра;
- ИМЯ ПРОГРАММЫ – имя выбранной для выполнения УП и имена подпрограмм (2-го уровня).








