 2015-09-07
2015-09-07 434
434ДослІДження регулюВАЛЬНОго релейного блоку Р21
Мета роботи – вивчення принципу дії, побудови, основних характеристик, методики лабораторних перевірок регулювального блоку Р21 та одержання навичок з налаштування приладу.
Робота виконується на універсальному лабораторному стенді пультового типу.
1 Завдання по роботі
1.1 Перевірити дію зворотних зв’язків та потенціометра «Импульс».
1.2 Визначити статичні характеристики релейного елементу блоку i перевірити градуювання потенціометру «Зона».
1.3 Перевірити градуювання перемикачів «VСВ» i «ТИ».
1.4 Виконати налаштування блоку на задані параметри.
2 Загальні відомості
2.1 Призначення регулювального блоку
Блок Р21 призначений для застосування у складі локальних систем автоматичного регулювання, що використовують інформацію у вигляді уніфікованих сигналів 0–5 мА i 0–20 мА.
У пульсуючому режимі при вхідному сигналі, що набагато перевищує зону нечутливості блоку, його передаточна функція разом з виконавчим механізмом постійної швидкості та пусковим пристроєм близька до передаточної функції лінійного ПІ-регулятора:
 . (1.1)
. (1.1)
Коефіцієнт пропорційності блоку КП визначається за виразом
 , (1.2)
, (1.2)
де  – швидкість виконавчого механізму, %х.р.о./с;
– швидкість виконавчого механізму, %х.р.о./с;
 – швидкість зміни сигналу головного зворотного зв’язку, %/с.
– швидкість зміни сигналу головного зворотного зв’язку, %/с.
Формування ПІД-закону регулювання можливе при роботі блоку в комплекті з блоком диференціювання Д01 або Д03. Для реалізації П-закону регулювання блок Р21 охоплюється жорстким зворотним зв᾽язком за положенням виконавчого механізму або за значенням регулювальної дії, що вводиться через вимірювальні блоки И04 або А04.
2.2 Структурна схема блоку (рисунок 1.1)
Блок складається із демпфуючого пристрою, двополярного операційного підсилювача постійного струму (ППС) типу УВ-41, трипозиційного релейного магнітно-тиристорного підсилювача типу УР-2, що разом утворюють прямий канал, ланцюгів головного негативного зворотного зв᾽язку (ГНЗЗ), додаткового позитивного зворотного зв’язку (ДПЗЗ), додаткового негативного зворотного зв’язку (ДНЗЗ).
Вхідні сигнали постійного струму 0–5 мА, 0–20 мА i напруги 0...±1,25 В i 0... ±24 В підсумовуються на вході демпфуючого пристрою, постійна часу якого встановлюється зміною опору ТДФ. Вихідний сигнал демпфуючого пристрою разом з сигналами постійного струму 0–5 мА i 0...±24 В, а також сигналами зворотних зв’язків, що формують закон регулювання, підсумовуються на вході ППС УВ-41.
Вихідний сигнал ППС УВ-41 керує трипозиційним релейним підсилювачем УР-2, що має зони нечутливості і повернення. Підсилювач УР-2 призначений для комутації пускового пристрою виконавчого механізму регулятора. Зона нечутливості регулюється зміною коефіцієнта передачі ланки у ланцюгу ДООС ППС УВ-41 «Зона».
Закон регулювання формується ланцюгом ГНЗЗ, що виконано у вигляді нелінійної інерційної ланки першого порядку. Постійні часу ланки при вмиканні (ТВ) та вимиканні (ТО) блока різні, оскільки послідовно з ГНЗЗ ввімкнута неонова лампа, що розділяє ланцюги заряду i розряду конденсатора С зворотного зв’язку. Крім ГНЗЗ, прямий канал блока охоплено ДПЗЗ, що виконана у вигляді лінійної інерційної ланки i формує тривалість окремих вмикань t ВКЛ у пульсуючому режимі («Импульс»).
2.3 Принципова схема блоку (рисунок 1.2)
Сигнали постійного струму 0–5 мА на входах 1 i 3 та 0–20 мА на вході 2 перетворюються на резисторах R 1– R 3 у сигнали постійної напруги i додаються один з одним та з напругою 0…±1,25 В із входу 4. Сума сигналів на входах 2–4 надходить до демпфіруючого пристрою R 4, С 1. Його вихідний сигнал разом з сигналами 0–5 мА (зі входу 1) та сигналом із входу 5 надходить до ППС УВ-41. Всі невикористані входи блоку закорочують. До клем 12–13 або до гнізд А–Б блоку може бути подключений індикатор для контролю сигнала розлагодження.
Вихідний сигнал ППС УВ-41 надходить до релейного підсилювача УР-2 через дволанковий фільтр, утворений вихідним опором УВ-41, конденсаторами С 5, С 6 i резистором R 7. Напруга на виході ППС УВ-41 може бути виміряна на гніздах В–Б. ППС УВ-41 охоплений жорстким негативним зворотним зв’язком, ступінь якого визначається положенням повзунків потенціометрів R 5 i R6 a. Резистор R 5 визначає мінімальну зону нечутливості блока, а потенціометр R 6 a «Зона» є органом статичного налаштування блоку, що дозволяє встановити потрібне значения зони нечутливості.
Підсилювач УР-2 перетворює сигнал, що надходить до його входу, у напругу постійного струму, що комутує пусковий пристрій виконавчого механізму. Для візуального визначення напрямку спрацювання блоку призначені світлові індикатори Н 2 i Н З.
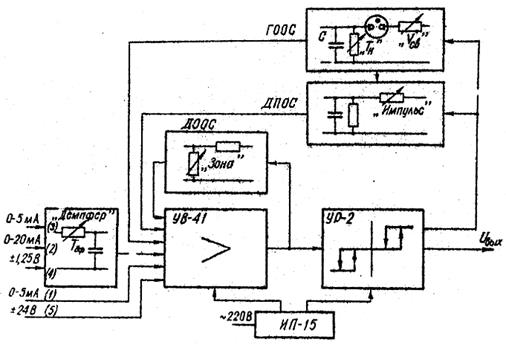
Рисунок 1.1 – Структурна схема блоку Р21
При спрацюванні блоку одночасно з появою напруги на навантаженні (клеми 7–8 або 9–8) на виході УР-2 виникає напруга зворотного зв’язку імпульсної форми. З клем 15А–16А i 15A–14A ця напруга надходить до ланцюгів ГНЗЗ i ДПЗЗ. Напруга зворотного зв’язку демодулюється нелінійним опором, роль якого в ГНЗЗ виконує неонова лампа H1, а в ДПЗЗ – діодний міст VD1–VD4, в діагональ якого ввімкнутий стабілітрон VD 5.
У момент, коли напруга UОС перевищить порогову напругу UГ нелінійного опору, починається заряд конденсатора С 2 ГНЗЗ i конденсатора С 3 ДПЗЗ, сума напруг яких подається до входів ППС УВ-41. При спрацюванні блоку в протилежний бік напруга UОС, а отже, i струм заряду конденсаторів, змінюють полярність на протилежну.
Швидкість заряду конденсатора ГНЗЗ VСВ визначається значенням ємності цього конденсатора i сумою опорів резистора R8 та одного з резисторів, значення опору якого дозволяє встановити коефіцієнт пропорційності регулятора. Постійна часу розряду конденсатора С 2 ГНЗЗ дорівнює постійній часу інтегрування регулятора ТИ, що визначається значенням ємності конденсатора С 2 i опором одного з резисторів R 17– R 27, що вмикається перемикачем S 1 «ТИ».
Тривалість одного ввімкнення задається положенням повзунка потенціометра R 15б «Импульс», що визначає постійну часу ДПЗЗ. При мінімальній зоні нечутливості напруга, що викликає заряд конденсатора С З, визначається опором дільника R 11 i R 6 б – R 10– R 9.
Для того, щоб при зміні зони нечутливості тривалість увімкнення залишилася незмінною, за допомогою потенціометра R 6 б, здвоєнного з потенціометром R 6 a, збільшується напруга, що викликає заряд конденсатора С З. При увімкненні блоку до входу ДПЗЗ одночасно подається напруга, пропорційна струму заряда конденсатора С 2 ГНЗЗ, i напрузі, що знімається з резисторів R 15 a i R 16. Ця напруга діє як позитивний зворотний зв’язок i компенсує зміну тривалості увімкнень при зміні швидкості зворотного зв᾽язку блоку.
При збільшенні тривалості увімкнень повинен зростати вплив позитивного зворотного зв’язку, для чого змінний резистор R 15 a здвоєний з потенціометром R 15 б. У блоці передбачена можливість вимкнення ДПЗЗ шляхом замикання гнізд Б–Д. Вимкнення ГНЗЗ здійснюється замиканням гнізд Г–Б блоку.
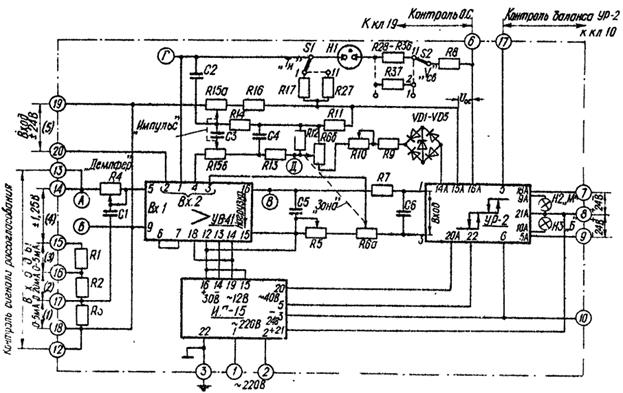
Рисунок 1.2 – Принципова схема блоку Р21
2.4 Органи контролю i налагодження
Органи контролю i налагодження розташовані на бічній панелі блоку:
– Потенціометр «Демпфер» (R 4) – призначений для зміни постійної часу демпфірування ТДФ;
– Потенціометр «Зона» (R 6 a) – призначений для зміни значення зони нечутливості блоку;
– Потенціометр «Импульс» (R 15 б) – використовується для зміни тривалості ввімкнень виконавчого механізму у пульсуючому режимі;
– Перемикач «VСВ» – призначений для зміни швидкості заряду ланцюгів зворотного зв’язку;
– Перемикач «ТИ» – призначений для зміни постйної часу інтегрування ТИ.
– Гнізда А–Б – призначені для контролю вхідного сигналу; гнізда В, Г, Д – для контролю напруги, відповідно, підсилювача УВ-41, головного i додаткового зворотних зв’язків.
На лицьовій панелі блоку розміщені світлові індикатори, що призначені для контролю спрацювання блоку у напрямках «Більше» та «Менше».
1.3 Порядок виконання роботи
Дослід 1. Перевірка дії зворотних зв’язків
1.1 Увімкнути напругу живлення блоку.
1.2 Вимкнути перемичкою ДППЗ.
1.3 Встановити перемикачі «ТИ» i «VСВ» у середні положення.
1.4 Встановити на джерелі струму (ДС) – задатнику ЗУ05, вхідний сигнал меншим +2 мА та стрибком за допомогою тумблера на ДС подати його до входу блоку «От ЗУ». Перевірити встановлення пульсуючого режиму блоку.
1.5 Повторити п.1.4 для протилежної полярності сигналу на вході «От ЗУ».
1.6 Перевірити справність блоку при подачі сигналу на «Вход 1» від вимірювального блоку И04 або А04.
1.7 Встановити перемикач «ТИ» у положення «32 с», «VСВ» – у положення «0,16 %/с». Потенціометри «Зона» та «Импульс» встановити в крайні праві положения.
1.8 Ввести до роботи всі зворотні зв’язки блоку, знявши відповідні перемички.
1.9 На ДС встановити сигнал 0,1 мА.
1.10 Подати стрибком сигнал від ДС до входу «От ЗУ» та зафіксувати тривалість десяти ввімкнень за допомогою секундоміра. Середнє арифметичне значення імпульсу tИСПР повинно дорівнювати приблизно 2 с.
1.11 Встановити ручку «Импульс» у крайнє ліве положення та повторити п.1.10. При цьому tИСПР повинно дорівнювати приблизно 0,3 с.
Дослід 2. Визначення статичної характеристики релейного елемента блоку, перевірка i градуювання потенціометра «Зона»
2.1 Вимкнути перемичками зворотні зв’язки у блоку.
2.2 Встановити всі потенціометри та перемикачі блоку в крайні ліві положення.
2.3 Приєднати ДС до «Входу 1».
2.4 Повільно збільшуючи вхідний сигнал від ДС, зафіксувати струм спрацювання  по ввімкненню світлових індикаторів.
по ввімкненню світлових індикаторів.
2.5 Повільно зменшуючи вхідний сигнал від ДС, зафіксувати струм відпускання  . Розрахувати відносну величину зони повернення
. Розрахувати відносну величину зони повернення
 (1.3)
(1.3)
2.6 Повторити пп. 2.4 та 2.5 для вхідного сигналу від ДС протилежної полярності, зафіксувати  ,
,  , визначити
, визначити  і мінімальну зону нечутливості у відносних одиницях
і мінімальну зону нечутливості у відносних одиницях
 (1.4)
(1.4)
2.7 Повторити пп.2.4–2.6 для 3–4 проміжних положень ручки потенціометру «Зона». Результати вимірів занести до таблиці 1.1.
Визначити похибку встановлення значення зони нечутливості
 (1.5)
(1.5)
Таблиця 1.1
| Положення ручки «Зона», D Г | I¢СР | I¢ОТП | Дійсне значення зони повернення, D ВД | I¢¢СР | I¢¢ОТП | Дійсне значення зони нечутливості, D Д | Похибка встановлення зони нечутливості, σ D |
| % | мА | мА | % | мА | мА | % | % |
Дослід 3. Перевірка градуювання перемикачів «VСВ» і «ТИ»
3.1 Відключити перемичками зворотні зв’язки блоку.
3.2 Встановити всі потенціометри блоку у крайні ліві положення.
3.3 Встановити перемикачі «VСВ» i «ТИ» у крайні праві положення.
3.4 Встановити сигнал від ДС на вході «От ЗУ» рівним +0,4 мА.
3.5 Зібрати схему керування виконавчим механізмом, встановити за допомогою блока управління ручний режим роботи системи.
3.6 Подати вихідний сигнал від регулюючого органу на самописний потенціометр КСП4 i за його показаннями встановити виконавчий механізм у середнє положения (50 %).
3.7. Встановити швидкість руху діаграмної стрічки КСП4 рівною 1800 мм/год.
3.8 Ввести до роботи головний зворотний звۥязок, знявши відповідну перемичку, та перевести блок керування в положення «Автомат».
3.9 Тумблером ДС стрибком подати сигнал до входу блоку, одночасно ввімкнути тумблер «Диаграмма» КСП4.
3.10 Записати вихідний сигнал регулюючого органу на діаграмі до значення, меншого 80% від межі вимірювань КСП та вимкнути тумблер «Диаграмма».
3.11 Повторити пп.3.6–3.10 для протилежної полярності вхідного сигналу.
3.12 Повторити пп.3.6–3.11 для 3–4 проміжних положень перемикача «VСВ» та 3–4 проміжних положень перемикача «ТИ».
3.13 Провести графічну обробку одержаних кривих розгону регулятора та визначити дійсні значення постійної часу інтегрування  в секундах, коефіцієнта передачі регулятора КРд i швидкості зміни сигналу зворотного зв᾽язку
в секундах, коефіцієнта передачі регулятора КРд i швидкості зміни сигналу зворотного зв᾽язку  :
:
 , (1.6)
, (1.6)
 , (1.7)
, (1.7)
де  – зміна вихідного сигналу РО при першому включенні виконавчого механізму, В;
– зміна вихідного сигналу РО при першому включенні виконавчого механізму, В;
IE – вхідний струм, мА;
KPO – коефіцієнт передачі РО, що був визначений у попередніх лабораторних роботах, В/% х.р.о.;
– швидкість виконавчого механізму, що була визначена у попередніх лабораторних роботах, % х.р.о./с.
3.14 Результати виконання дослідів занести до таблиці 1.2.
Визначити похибки встановлення постійної часу інтегрування (часу ізодрому) σТи та швидкості зв’язку σVсв:
 (1.8)
(1.8)
Таблиця 1.2
| Положення пере-микача «ТИ», ТИГ | Положення пере-микача «VСВ», VСВ Г | Ie | КРО | SИМ | D UРО | КРД | VСВД | σТи | σVсв |
| с | 
| мА | 
| 
| В | 
|
| % | % |
Дослід 4. Налаштування блоку на задані параметри
4.1 За результатами попередніх дослідів побудувати графіки градуювань органів налаштування «ТИ», «VСВ», «Демпфер», «Імпульс» i «Зона». Згідно з вapiaнтом індивідуального завдання (таблиця 1.3) з цих графіків визначити дійсні положення органів налаштування (уставки) для всіх параметрів налаштування блоку Р21.
4.2 Зібрати схему для спільної роботи блоків И04 та Р21.
4.3 Виставити в блоці Р21 значення уставок, що були визначені в п. 4.1 з урахуванням положення ручок «КП» блоку И04.
4.4 Перевірити дійсне значення зони нечутливості блоку.
Таблиця 1.3
| Варіант | 
| 
| 
| 
| 
|
| 0,04 0,02 0,05 0,01 0,08 0,02 0,05 0,03 0,04 0,08 0,06 0,01 0,03 0,06 0,02 | 1,0 0,5 0,8 0,3 0,2 1,0 0,8 0,6 0,4 0,3 0,1 0,2 0,7 1,0 1,0 | 3.0 5,0 4,5 5,0 1,0 1,5 5,0 8,0 10,0 6,0 3,0 5,0 4,0 9,0 |
4.5 Встановити на ДС сигнал 0,1 мА.
4.6 Подати стрибкоподібний сигнал до входу блока И04 та записати перехідний процес регулювання на потенціометрі КСП4.
4.7 Визначити дійсні значення параметрів блока, наведені в таблиці 1.4, шляхом графічної обробки експериментальної кривої розгону. Розрахувати відносні похибки встановлення параметрів, результати розрахунків занести до таблиці 1.4.
Таблиця 1.4

| σКР | 
| σТИ | 
| σ Δ |

| % | с | % | 
| % |
Лабораторна робота № 2
Дослідження регулюВАльного аналогового блоку Р12
Мета роботи – вивчення принципу дії, побудови, основних характеристик, методики лабораторних перевірок блоку Р12 та одержання навичок з налаштування приладу.
1 Завдання по роботі
1.1 Перевірити дію обмежувачів вихідного сигналу.
1.2 Перевірити роботу ланцюгів безпоштовхового увімкнення.
1.3 Перевірити роботу режиму «запам’ятовування».
1.4 Перевірити градуювання потенціометру «КП».
1.5 Перевірити градуювання перемикача «ТИ».
1.6 Перевірити градуювання потенцюметру «ТД/ТИ».
1.7 Виконати налаштування блоку на задані параметри.
2 3агальні відомості
2.1 Призначення блоку
Блок Р12 призначений для застосування в системах автоматичного регулювання, що використовують інформацію у вигляді уніфікованих сигналів постійного струму, як окремий регулювальний пристрій для керування пропорційними підсилювачами потужності або як коректувальний пристрій у каскадних схемах регулювання.
Блок забезпечує формування П-, ПІ- та ПІД-законів регулювання згідно з передавальною функцією:
 (2.1)
(2.1)
де КП – коефіцієнт передачі,
ТИ, ТД, ТДФ – постійні часу, відповідно, інтегрування, диференціювання та демпфування.
Вхідні сигнали надходять до блоку безпосередньо або через блоки И04 та А04. Безпоштовхове перемикання вихідних ланцюгів блоку з автоматичного до ручного керування та зворотно здійснюється за допомогою зовнішнього блоку керування типу БУ12. При реалізації П-закону безпоштовхове перемикання не забезпечується.
2.3 Структурна схема блоку
Блок Р12 складається з (рисунок 2.1): вузла вхідних ланцюгів 1; підсилювача постійного струму (ППС) 2 типу УВ-22; модуля динаміки 3; модуля обмеження 4; нормуючого операційного підсилювача 6 типу УВ-21; джерела живлення 5.
Вузол вхідних ланцюгів 1 компенсує сигнали струмових датчиків ІД або датчиків постійної напруги UД сигналом пристрою формування завдання ІЗУ та формує сигнал розлагодження UЕ. При ручному керуванні подається сигнал від блоку керування ІБУ.
Підсилювач 2 підсилює різницю між сигналом UЕ та сигналом зворотного зв᾽язку UОС з коефіцієнтом передачі К2 = 1,5·103.
Модуль динаміки 3 містить ланцюги зворотного зв’язку, що сприймають сигнал UА з виходу підсилювача 6, i формує сигнал UОС, що забезпечує реалізацію обранного закону регулювання. Ланцюги безпоштовхового перемикання модуля комутуються контактами реле К за сигналом від блоку керування БУ12 в режимі Р («Ручное»).
Модуль обмеження 4 повторює вихідний сигнал підсилювача 2 на лінійній ділянці своєї характеристики з коефіцієнтом передачі К4 = 1, а на ділянці обмеження забезпечує його двобічне обмеження.
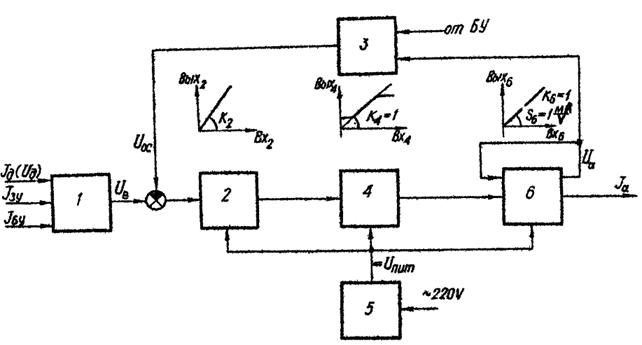
Рисунок 2.1 – Структурна схема блоку Р12
Підсилювач 6 охоплений жорстким негативним зворотним зв’язком з коефіцієнтом передачі по додатковому виходу за напругою К6 = 1 та перетворює сигнал після обмежувача 4 у вихідний струм з коефіцієнтом передачі S = 1 мА/В.
2.3 Принципова схема блоку (рисунок 2.2)
Прямий канал блоку Р12 містить ППС типу УВ-22, модуль обмеження та ППС типу УВ-21.
Вхідний сигнал подається на клеми 1, 6 підсилювача УВ-22; вихідний сигнал знімається з клем 18, 9. Навантаженням підсилювача є резистор R 14.
Модуль обмеження містить діоди VD 2, VD 3, послідовно з якими ввімкнуті потенціометри R 17 та R 21, що виконують роль джерел опорних напруг для закриття діодів VD 1 i VD 2. При перевищенні вихідним сигналом УВ-22 падіння напруги між повзуном R 17 «Огр. макс.» та загальною точкою діод VD 2 відкривається та шунтує вихід підсилювача УВ-22, перешкоджаючи подальше збільшення сигналу на вході УВ-21. При зменшенні вихідного сигналу УВ-22 до величини, меншої, ніж падіння напруги на R21 «Огр. мін.», відкривається діод VD 1, перешкоджаючи зменшенню сигнала на виході УВ-21.
Вихідний сигнал модуля обмеження подається до входу 2 УВ-21 (клеми 2, 6), з виходу якого (клеми 18 та 14 підсилювача) струмовий сигнал надходить до виходу блока (клеми 7 та 8 блоку).
Сигнал з додаткового виходу УВ-21 (з клем 21, 22) подається на потенціометри R 27 та R 26 ланцюгів функціонального зворотного зв’язку модуля динаміки. Потенціометром R 27 «КП» регулюють значення коефіцієнту передачі. За допомогою дільника R 24, R 25 та перемикача S 2 («Множитель КП») здійснюється зміна діапазону дії ручки R 27 «КП».
Подвоєним перемикачем S 1.1 та S 1.2 («ТИ») змінюють значення постійної часу інтегрування та обирають потрібний закон регулювання.
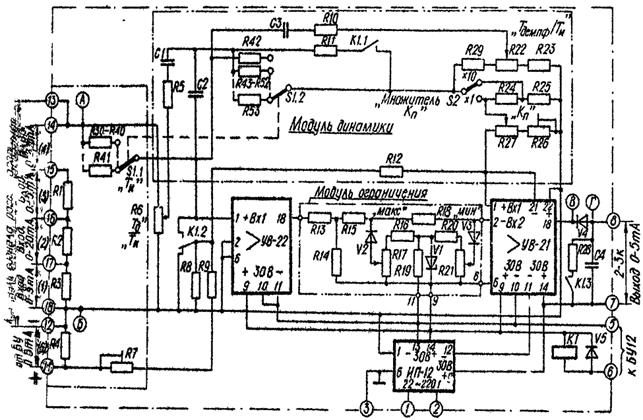
Рисунок 2.2 – Принципова схема блоку Р12
Потенціометром R 6 («ТД/TИ») змінюють відношення постійних часу диференціювання та інтегрування, а потенціометром R 22 («ТДФ/ТИ») встановлюють відношення постійних часу демпфування та інтегрування. Конденсатор С 1 є диференціюючим, С 2 – інтегруючим, С3 – демпфуючим.
Для безпоштовхового перемикання вихідних ланцюгів блоку R 12 при переході з автоматичного керування на ручне та навпаки i для ручного керування струмом навантаження використовується блок керування БУ12.
Блок БУ12 містить два синхронно працюючих регульованих джерела струму, виконаних у вигляді підсилювачів постійного струму.
Ланцюги блоку R 12, що забезпечують безпоштовхове перемикання, містять у coбi реле К 1 та резистори R 7, R 8, R 9, R 11, R 12, R 28. При ручному керуванні за сигналом від БУ-12 (клеми 5, 6) вмикається реле К 1. Контактна група К 1.2 подає до входу УВ-22 сигнал від одного з струмових задатчиків блока керування (клеми 11, 12), причому прямий канал охоплюється жорстким негативним зворотним зв’язком за допомогою резисторів R 8, R 12. Контактна група К 1.3 приєднує до виходу УВ-21 резистор еквівалентного навантаження R 28.
Контактна група К 1.1 шунтує резистором R 11 ланцюги перемикача S 1 («ТИ»), що забезпечує заряд конденсаторів зворотного зв’язку С 2 з малою постійною часу.
Друге джерело струму БУ12 використовується для керування навантаженням (виконавчим механізмом) у режимі ручного керування.
При виконанні П-закону регулювання безпоштовхове перемикання при переході з ручного до автоматичного регулювання не забезпечується.
2.4 Органи контролю i налаштування
На бічній панелі блоку розташовані органи контролю i налаштування:
– перемикач «Множитель КП» – забезпечує 10-кратну зміну діапазону встановлення коефіцієнта передачі;
– потенціометр «КП» – повільно змінює коефіцієнт передачі;
– перемикач «ТИ» – забезпечує вибір П- або ПІД-закону та дискретно встановлює постійну часу інтегрування;
– потенціометр «ТД/ТИ» – змінює відношення постійної часу диференціювання до постійної часу інтегрування;
– потенціометр «ТДФ/ТИ» – змінює відношення постійної часу демпфування до постійної часу інтегрування;
– потенціометри «Огр. макс.» та «Огр. мін.» – призначені для встановлення верхнього i нижнього рівня обмеження вихідного сигналу;
– гнізда А–Б та В–Г – призначені для контролю напруги сигналу неузгодження на вході та струму на виході блоку.
2.5 Порядок виконання роботи
Дослід 1. Перевірка дії обмежувача вихідного сигналу
1.1 Зібрати схему для спільної роботи блоків Р12 та БУ12. Підключити міліамперметр до виходу БУ12.
1.2 Ввімкнути напругу живлення блоків Р12, БУ12 та джерела струму (ДС) ЗУ05.
1.3 Встановити на блоці Р12 ручку «КП» у крайнє праве положення, «ТИ» – у положення «П», перемикач «Множитель КП» – у положення «Ч1», інші ручки у крайні ліві положення. На БУ12: перемикач керування – в положення «А», ручку «Р» – у крайнє ліве положення. Встановити перемички на всі входи блоку, що не використовуються.
1.4 Для 4–5 положень «ОГР.МИНГ» ручки потенціометру «Огр. мин» визначити вихідний сигнал блоку І ОГР.МИН. Результати вимірювань занести до таблиці 2.1.
1.5 3няти перемичку з клем «Вход 1» та підключити до нього ДС. Встановити органи налагодження відповідно з п. 1.3.
1.6 За допомогою ДС встановити вихідний сигнал блоку Р12, рівним 5 мА. Для 4–5 проміжних положень «ОГР.МАХГ» ручки потенціометру «Огр. макс» визначити вихідний сигнал блоку ІОГР.МАХ. Результати вимірювань занести до таблиці 2.1.
1.7 Побудувати графіки залежностей ІОГР.МАХ = f (ОГР.МАХГ) та ІОГР.МАХ = f(ОГР.МАХГ).
Таблиця 2.1
| Положення ручки «Огр.мин.», ОГР.МИНГ | І ОГР.МИН | І ОГР.МИН | Положення ручки «Огр.макс.», ОГР.МАХГ | ІОГР.МАХ | ІОГР.МАХ |
| % | мА | % | % | мА | % |
Дослід 2. Перевірка ланцюгів безпоштовхового перемикання
2.1 Перевести перемикач блоку БУ12 в положення «Р», а перемикачі блоку Р12: «ТИ» – у положення «5 с», інші органи налагодження – у положення, вказані для досліду 1 в п. 1.3.
2.2 Ручкою потенціометру «Р» БУ12 встановити вихідний струм  2,5 мА.
2,5 мА.
2.3 Через 10 с перевести перемикач керування БУ12 у положення «А», а ще через 4 с виміряти вихідний струм Р12  Результати вимірювань занести до таблиці 2.2.
Результати вимірювань занести до таблиці 2.2.
2.4 Визначити значення струму Іа, що не повинно перевищувати 0,25 мА.
Таблиця 2.2

| 
| 
|
| мА | мА | мА |
Дослід 3. Перевірка режиму «запам’ятовування»
3.1 Ручку потенціометра «КП» перевести у положення «0,5», перемикач «ТИ» – «530 с».
3.2 Ручкою потенціометру «Р» БУ12 встановити вихідний струм Р12  2,5 мА.
2,5 мА.
3.3 Перевести перемикач керування БУ12 у положення «А». Через 15 с після заспокоєння стрілки міліамперметра виміряти струм 
3.4 На протязі 3–5 хвилин через кожні 30 с вимірювати струм  Визначити максимальну зміну струму за цей час
Визначити максимальну зміну струму за цей час
що не повинна перевищувати 0,3 мА. Результати занести до таблиці 2.3.
Таблиця 2.3

| 
| 
| 
| ... | 
| 
|
| мА | мА | мА | мА | мА | мА |
Дослід 4. Визначення градуювання потенціометру «КП»
4.1 Перемикач блока БУ12 встановити у положення «А», а ручку «Р» – у положення «0». Bci органи налагодження Р12 встановити у крайні ліві положення, а перемикач «Множитель КП» – «×1».
4.2 До клем «Вход 1» та «От ЗУ» приєднати два ДС.
4.3 Подати нульовий вхідний сигнал  до клем «Вход 1» та, змінюючи сигнал
до клем «Вход 1» та, змінюючи сигнал  на вході «От ЗУ», встановити зміщення вихідного сигналу Р12
на вході «От ЗУ», встановити зміщення вихідного сигналу Р12  2 мА.
2 мА.
4.4 Змінюючи сигнал , встановити вихідний сигнал Р12  4 мА. Виміряти значення струму
4 мА. Виміряти значення струму  та занести до таблиці 2.4.
та занести до таблиці 2.4.
Якщо < 0,2 мА, то у ланцюг між ДС та «Входом 1» Р12 ввімкнути блок А04 з коефіцієнтом передачі КА04 таким, щоб струм ДС був більшим 0,2 мА.
Коефіцієнт пропорційності блоку Р12 визначити за формулою:
 (2.2)
(2.2)
4.5 Визначити похибку встановлення коефіцієнту передачі КП
 . (2.3)
. (2.3)
4.6 Повторити пп. 4.3–4.5 для 5–6 проміжних положень ручки «КП».
4.7 Повторити пп. 4.3–4.6 для положення перемикача «Множитель КП» – «×10».
4.8 Побудувати графіки КП = f (КПГ) для положень перемикача «Множитель КП» – «×1» та «×10».
Таблиця 2.4
| Положення перемикача «Множитель КП» | Положення ручки «КП», КПГ | КА04 |
| 
| КП | σКП |
| – | – | мА/мА | мА | мА | мА/мА | % |
Дослід 5. Визначення градуювання перемикача «ТИ»
5.1 Встановити перемикач керування БУ12 у положення «Р», ручку «Р» – у положення «0». На блоці Р12 всі органи керування встановити у крайні ліві положення, перемикач «Множитель КП» – «×1», «ТИ» – 5 с. До «Входу 1» приєднати ДС.
5.2 Вихідний сигнал Р12 подати до самописного потенціометра КСП4.
5.3 На «Вході 1» встановити сигнал  = 0,4 мА, якщо ТИГ < 10 с, або = 4 мА, якщо ТИГ ≥ 10 с. Вимкнути ДС.
= 0,4 мА, якщо ТИГ < 10 с, або = 4 мА, якщо ТИГ ≥ 10 с. Вимкнути ДС.
5.4 Ручкою «Р» блоку БУ12 встановити зміщення вихідного сигналу Р12  = 0,5 мА, потім перевести перемикач керування БУ12 у положення «А». Через 10 с ввімкнути тумблер «Диаграмма» КСП4, подати стрибком сигнал від ДС. Після запису графіка вимкнути тумблер «Диаграмма» КСП4, зняти збурення та перевести перемикач БУ12 у положення «Р». Визначити по графіку постійну часу ТИД. Результати вимірювань занести до таблиці 2.5.
= 0,5 мА, потім перевести перемикач керування БУ12 у положення «А». Через 10 с ввімкнути тумблер «Диаграмма» КСП4, подати стрибком сигнал від ДС. Після запису графіка вимкнути тумблер «Диаграмма» КСП4, зняти збурення та перевести перемикач БУ12 у положення «Р». Визначити по графіку постійну часу ТИД. Результати вимірювань занести до таблиці 2.5.
5.5 Повторити пп. 5.3, 5.4 для 5–6 проміжних положень перемикача «ТИ».
5.6 Визначити похибку встановлення постійної часу Ти:
 (2.4)
(2.4)
5.7 Побудувати графік залежності  f (TИГ).
f (TИГ).
Таблиця 2.5
| Положення ручки «ТИ», TИГ |
|
| 
| σTИ |
| с | мА | мА | с | % |
Дослід 6. Визначення градуювання потенціометру «ТДФ/ТИ»
6.1 Вихідні положення органів налагодження Р12 та БУ12 ті ж самі, що й у п.5.1, а перемикач «ТИ» – у положенні максимального значення ТИ.
6.2 Встановити на «Вході 1» Р12 сигнал ДС = 4 мА.
6.3 Ручкою потенціометра «Р» БУ12 встановити зміщення вихідного струму блоку = 2,5 мА. Через 10 с перевести перемикач керування БУ12 у положення «А».
6.4 Ввімкнути тумблер «Диаграмма» КСП4 i через 10 с подати на Р12 стрибком сигнал від ДС. Записати графік перехідного процессу, з якого графічно визначити постійну часу  . Розрахувати величину відношення
. Розрахувати величину відношення
 (2.5)
(2.5)
6.5 Повторити п. 6.4 для 3–4 проміжних положень ручки «ТДФ/ТИ».
6.6 Визначити похибку встановлення постійної часу демпфування
 (2.6)
(2.6)
6.7 Побудувати графік залежності (ТДФ/ТИ) Д = f {(ТДФ/ТИ) Д }.
Таблиця 2.6
| Положення ручки ТДФ/ТИ, (ТДФ/ТИ) Г |
|
|
| 
| σ(ТДФ/ТИ) |
| – | мА | мА | с | – | % |
Дослід 7. Налаштувати блок на задані параметри
7.1 За результатами дослідів побудувати графіки градуювань ручок та перемикачів «КП», «ТИ», «ТД/ТИ», «ТДФ/ТИ», «Огр. макс», «Огр. мин». Згідно з вapiaнтом індивідуального завдання (таблиця 2.7) з цих графіків визначити дійсні положення ручок (уставки) для всіх параметрів настройки блоку Р12.
Таблиця 2.7
| Bapiaнт | КП, мА/мА | ТИ, с | ТД, с | ТДФ, с | Огр.макс, % | Огр.мин, % |
| 0,5 1,5 2,5 0,6 |
7.2 Встановити розрахункові значення уставок на блоці.
7.3 Встановити на «Вході 1» сигнал від джерела струму = 0,5 мА.
7.4 Подати стрибкоподібний сигнал на «Вход 1» блоку та записати криву розгону ПІД-регулятора на потенціометрі КСП4.
7.5 Визначити дійсні значення параметрів блока, наведені в таблиці 2.8, шляхом графічної обробки графіку експериментальної кривої розгону. Розрахувати відносні похибки встановлення параметрів, результати розрахунків занести до таблиці 2.8.
Таблиця 2.8
| КПд | σКП | ТИд | σТИ | ТДд | σТД |
| мА/мА | % | с | % | с | % |








