 2015-09-06
2015-09-06 870
870Целью кинематического анализа является определение скоростей и ускорений отдельных точек и звеньев рычажного механизма по известному закону входного звена.
Путём дифференцируя уравнения дважды по q уравнения геометрического анализа, находятся аналоги скоростей и ускорений данного механизма.
План скоростей и ускорений
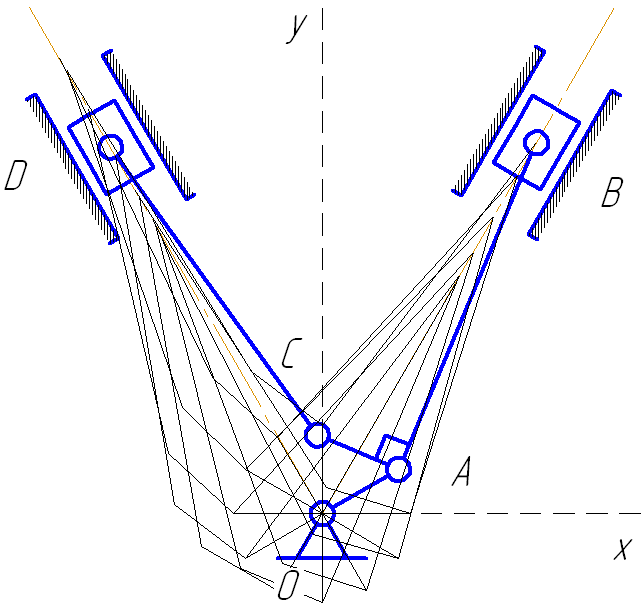
Рис.5.1. Положение механизма при 30°
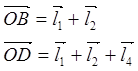
1. Сумму векторов можно представить как:
2. Производная по времени от каждого полученного векторного уравнения:
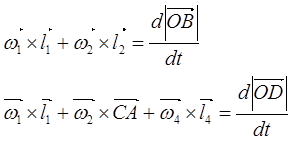
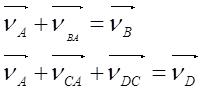
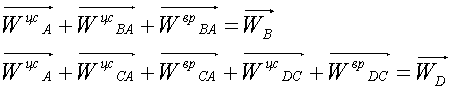
3. Полученные выражения можно представить в виде:
4. Построение плана скоростей:
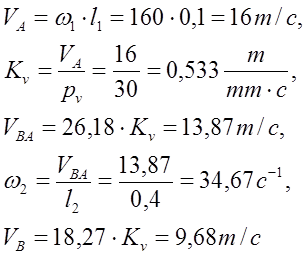

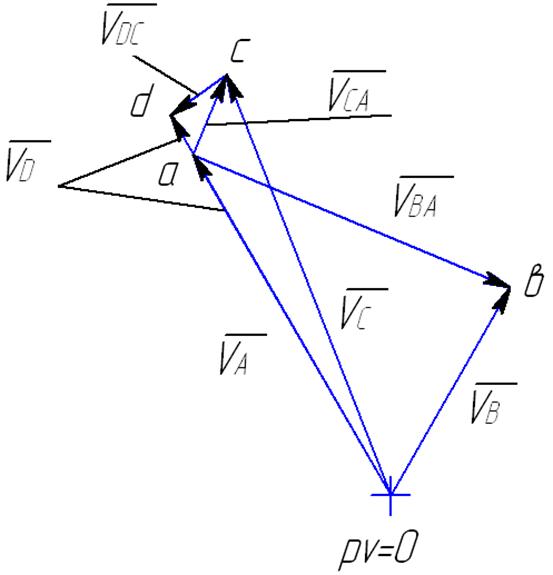
Рис.5.2. План скоростей для положения 30°
1. Производную по времени от каждого полученного векторного уравнения:
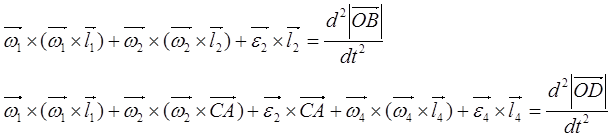
2. Полученные выражения можно представить в виде:
4. Построение плана ускорений:
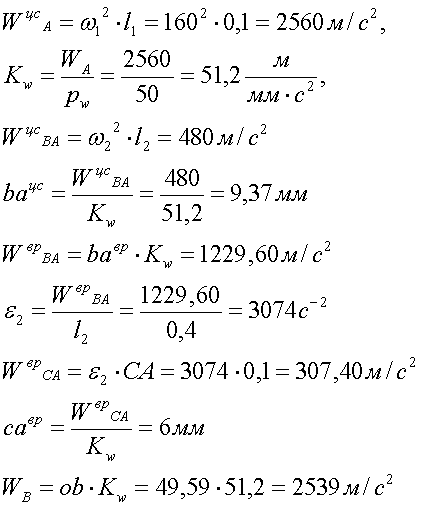
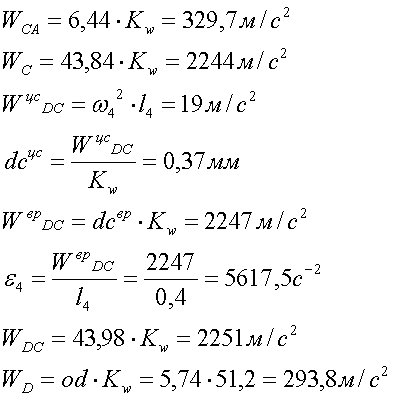
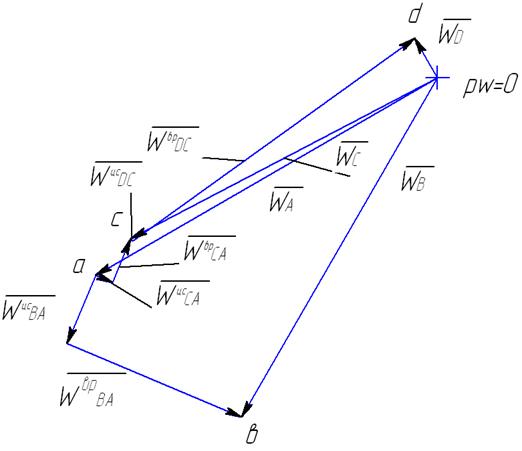
Рис.5.3. План ускорений для положения 30°
Аналогично для крайнего положения.
Построение плана скоростей:
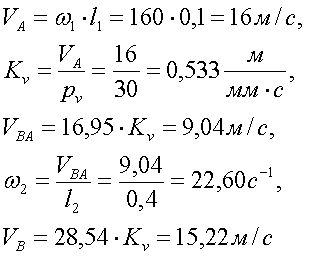
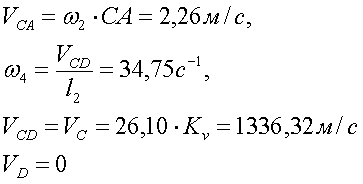
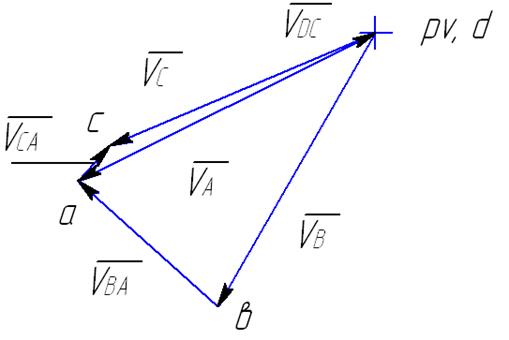
Рис.5.4. План скоростей для крайнего положения
Построение плана ускорений для крайнего положения:
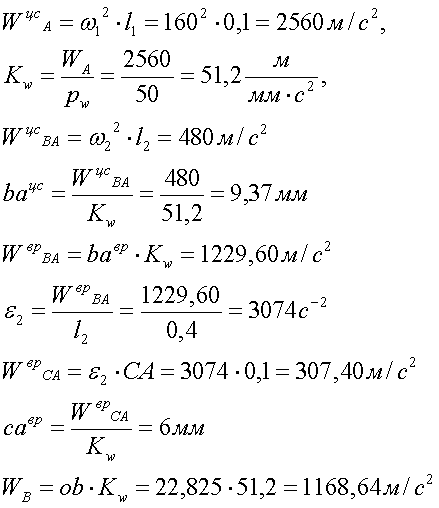
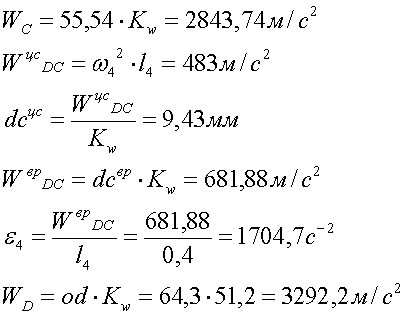
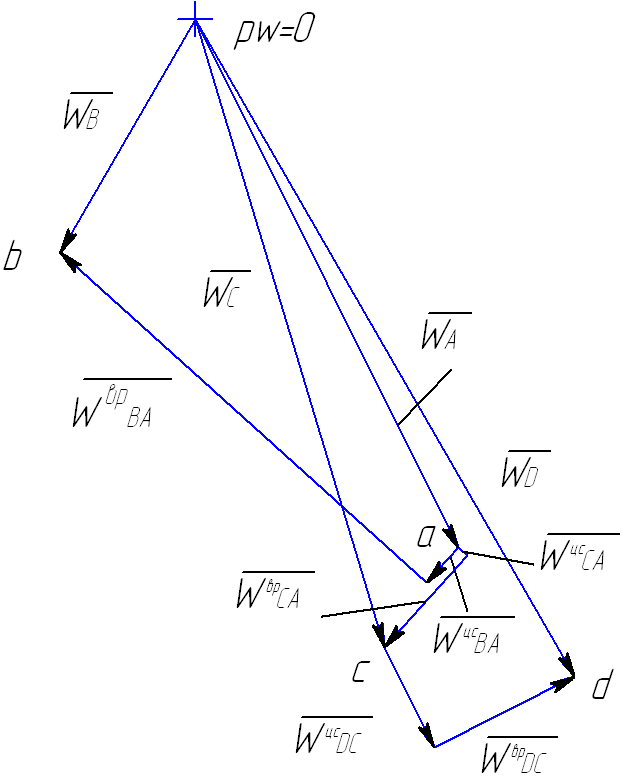
Рис.5.5. План ускорений для крайнего положения








