 2015-09-06
2015-09-06 9785
9785Интеллектуальная система автоматизированного вождения грузовых соединенных поездов на участках любого профиля (ИСАВП-РТ) предназначена для управления локомотивами соединенных поездов весом до 12 тысяч тонн в режиме автоведения. Движение соединенных грузовых поездов организуется для повышения пропускной и провозной способности участков и направлений, сокращения задержек поездов при производстве ремонтно-путевых и строительных «окон», ликвидации последствий стихийных бедствий, аварий, крушений.
Отличительное преимущество системы в возможности автоматизированного асинхронного и синхронного управления силовыми установками различных типов электровозов в режиме тяги и электрического торможения, согласованной работой тормозных систем при объединенных тормозных магистралях, а также реализация функции автоматизированного синхронного или с задержкой по времени управления локомотивов с головы поезда.
Система ИСАВП-РТ обеспечивает автоматическое ограничение продольных динамических сил сверх допустимых в составе соединенного поезда, что исключает возможность выдавливания вагонов и обрыв автосцепок при всех режимах управления.
Система автоведения ИСАВП-РТ устанавливается на все электровозы состава. Головной состав – ведущий, остальные – ведомые. Во время движения система ИСАВП-РТ на ведущем локомотиве, производит расчет режимов энергосберегающего управления для всех локомотивов состава. По защищенному цифровому каналу с помощью радиомодема режимы ведения передаются от ведущего локомотива ведомым, а ведомые электровозы передают ведущему информацию о своем состоянии.
Программа ИСАВП-РТ выполняет все функции по ведению поезда, как и программа базовой системы УСАВП-Г (подсистемой которой является система ИСАВП-РТ), но ее возможности расширены для ведения составов с распределенной тягой. В общем виде программа ИСАВП-РТ на основании информации об участке обслуживания и принятой с борта электровоза обеспечивает:
- расчет оптимальных по расходу электроэнергии режимов ведения поезда по маршруту;
- сравнение фактической скорости движения с расчетной и определение необходимой скорости движения поезда, для выполнения расчетного времени хода, в том числе на участках приближения к сигналам светофора, требующих снижения скорости, и при подъезде к местам действий ограничения скорости;
- выбор тяговой позиции электровоза в зависимости от расчетной величины скорости;
- расчет координат пути и местоположения поезда относительно станций;
- передачу команд управления и отклика между ведомым и ведущими локомотивами;
- реализацию режимов торможения для обеспечения требуемых скоростей.
Система автоведения грузовых соединенных поездов (ИСАВП-РТ), как и базовая система УСАВП-Г, может работать в трех режимах:
- автоведение – управление тягой и торможением полностью осуществляется системой автоведения;
- советчик – поездом управляет машинист, на экран системы выводится информация об оптимальном и текущем ведении;
- кнопочный контроллер – машинист управляет поездом через клавиатуру системы автоведения.
Перед началом работы ИСАВП-РТ проводится диагностика работы аппаратуры системы и ее взаимодействия с цепями электровоза. Постоянно в процессе движения ИСАВП-РТ контролирует состояние радиосвязи и работу аппаратных устройств. На экране ИСАВП-РТ отображается информация о текущем ведении: текущая и расчетная скорость, координата, профиль пути под локомотивом, позиция контроллера, сигнал АЛСН, статистика работы радиосвязи и информация о ведении на удаленном электровозе.
На основной экран дисплея ИСАВП-РТ дополнительно машинист может вывести информацию о показаниях различных датчиков, ближайших станциях, списке ограничений скорости и т.п. УСАВП-Г, как базовая система, помимо перечисленных режимов работы, может выполнять функцию круиз-контроля, когда поддерживается заданная машинистом скорость. Перед началом движения и при ведении поезда система УСАВП-Г позволяет менять параметр интенсивности следования по участку, изменять уставки тока, отключать применение торможения и управлять тягой электровозов с помощью кнопочного котроллера, включать или выключать речевые сообщения служебного характера для локомотивной бригады.
Система автоведения устанавливается на все электровозы состава. Сообщение между электровозами происходит по защищенному цифровому радиоканалу. Аппаратура ИСАВП-РТ базируется на системе УСАВП-Г, которая оборудуется сетевым модулем радиоканала (СМРК). В базовый состав аппаратуры ИСАВП-РТ для одного локомотива входят:
- сетевой модуль радиоканала (СМРК):
- контроллер связной локомотивный (КСЛ);
- антенна;
Система УСАВП-Г (см. ниже) включает в себя:
- блок системный (БС) с программой автоведения ИСАВП-РТ;
- блок индикации (БИ);
- блок дискретного управления (БДУ);
- система измерительных преобразователей;
- блок регулирования возбуждения возбудителей (БРВВ);
- регистратор параметров движения и автоведения грузового электровоза (РПДА-Г, РПДА-ГПТ).
Сетевой модуль радиоканала (СМРК) является одним из основных звеньев в системе ИСАВП-РТ. СМРК осуществляет обмен данными между ведущим и ведомыми локомотивами состава. В состав СМРК входят контроллер связной локомотивный (КСЛ), выполняющий функции радиомодема для обмена информацией между удаленными локомотивами и антенна для трансляции и приема данных.
Универсальная система автоведения электровозов грузового движения УСАВП-Г предназначена для автоматизированного управления электровозами с целью точного соблюдения времени хода, задаваемого графиком движения поездов или другим нормативным документом,
В системе ИСАВП-РТ на блок БС устанавливается программа автоведения ИСАВП-РТ, осуществляющая ведение соединенных поездов.
Технические харктеристики ИСАВП-РТ:
Напряжение питания....................................................................................................35÷65 В
Потребляемая мощность, не более..................................................................................80 Вт
Несущая частота канала связи............................................................................132÷174 МГц
Полоса пропускная канала..........................................................................................12,5 кГц
Количество поддиапазонов канала связи...............................................................................8
На экране ИСАВП-РТ отображается информация о текущем ведении поезда:текущая и расчетная скорость, координата пути, профиль пути под локомотивом, позиция контроллера, сигнал АЛСН, статистика радиосвязи и информация о ведении на удаленном электровозе. На экран ИСАВП-РТ дополнительно машинист может вывести информацию о показаниях различных датчиков, ближайших станциях, списке ограничений скорости и т.п. Базовая система УСАВП-Г, помимо перечисленных режимов, может выполнять функцию круиз-контроля, когда поддерживается заданная машинистом скорость. Перед началом движения и при ведении поезда система УСАВПГ позволяет менять параметр интенсивности следования по участку, изменять уставки тока, отключать применение торможения и управлятьтягой электровозов с помощью кнопочного котроллера, включать или выключать речевые сообщения служебного характера для локомотивной бригады.
Системой ИСАВП-РТ должны быть оборудованы все электровозы соединенного грузового состава.Сообщение между электровозами происходит по защищенному цифровому радиоканалу.
В базовый состав аппаратуры ИСАВП-РТ для одного локомотива входят:
- сетевой модуль радиоканала (СМРК):
- контроллер связной локомотивный (КСЛ);
- антенна.
Базовая система УСАВПГ (см. ниже)имее следующие составляющие:
– блок системный (БС) с программой автоведения ИСАВП-РТ;
– блок индикации (БИ);
– блок дискретного управления (БДУ);
– система измерительных преобразователей;
– блок регулирования возбуждения возбудителей (БРВВ);
– регистратор параметров движения и автоведения грузового электровоза (РПДА-Г, РПДА-ГПТ).
Сетевой модуль радиоканала (СМРК) является одним из основныхзвеньев в системе ИСАВП-РТ. СМРК осуществляет обмен данными между ведущим и ведомыми локомотивами состава. В состав СМРК входят контроллер связной локомотивный (КСЛ), выполняющий функции радиомодема, для обмена информацией между удаленными локомотивами и антенна для трансляции и приема данных.
Универсальная система автоведения электровозовгрузового движения УСАВПГ предназначена для автоматизированного управления электровозами с целью точного соблюдения времени хода, задаваемого графиком движения поездов или другим нормативным документом.
Технические характеристики системы ИСАВП-РТ:
Напряжение питания................................................................................................... 35÷65 В
Потребляемая мощность, не более..................................................................................80 Вт
Несущая частота канала связи............................................................................132÷174 МГц
Полоса пропускная канала..........................................................................................12,5 кГц
Количество поддиапазонов канала связи..............................................................................8
Реализация автоматического ведения поезда со сдвоенными либо распределенными по длине состава локомотивами приводит к повышению пропускной способности участков на 4-6%, повышению маршрутной скорости до 1000 км/сутки и, как следствие, сокращению оборота подвижного состава на 20%. Правильный подбор управления системой ИСАВП-РТ, уменьшение числа рутинных операций по управлению локомотивом и повышение информированности машиниста в условиях ограниченной видимости (снег, дождь, туман, ночь), даже в режиме «Советчик» существенно облегчает труд машиниста и повышает безопасность движения состава.
Системы автоведения пригородных электропоездов, поездов грузового и пассажирского движения УСАВП (с индексами по роду движения) предназначены для автоматизированного управления подвижным составом с соблюдением норм безопасности движения в соответствии с заданным временем хода (или графиком) на основе выбора энергетически рационального режима движения.
Системы УСАВП относятся к автономным системам автоведения, т.е. свое местонахождение и требуемые режимы движения система определяет самостоятельно.Системы автоведения облегчают труд машиниста, способствуют повыше нию производительности труда, позволяют экономно расходовать электроэнергию и вести учёт ее расхода.Повышается безопасность движения за счёт автоматического исполнения скоростного режима движения по сигналам светофоров с учётом постоянных и временных ограничений скорости, а также за счет уменьшения утомляемости машиниста.Система контролирует правильность работы функциональных узлов аппаратуры, осуществляя при этом функцию самодиагностики.
В состав систем УСАВП входит регистратор параметров движения (РПДА).
Системы автоведенияУСАВП выполняют следующие функции:
- определяют фактические параметры движения поезда и выводят их на экран дисплея;
- ведут расчет рекомендуемых параметров движения поезда и управляющих воздействий в реальном времени;
- производят запись регистрируемых параметров на картридж (через подсистему
РПДА);
- проводят тестирование аппаратуры автоведения и тягового подвижного состава и осуществляют контроль исправности аппаратуры;
- осуществляют визуальный и звуковой диалог с машинистом;
- управляют тягой и торможением.
Система автоведенияУСАВП обеспечивает поддержание заданной скорости и непрерывно рассчитывает её оптимальное значение в условиях меняющейся поездной обстановки, минимизируя расход электроэнергии и жестко соблюдая расписание (для пассажирского движения) или перегонное время хода (для грузового движения).
Дисплей системы информирует машиниста о текущих параметрах следования:
- координата, скорость и время;
- профиль пути;
- сигнал локомотивного светофора;
- текущее и следующее ограничение скорости;
- ближайшие станции и путевые объекты;
- информация об исполнении расписания.

Рис.1. Дисплей УСАВП
По желанию машинист может вывести на экран дополнительную информацию, например, давление в тормозной магистрали, список всех ограничений скорости, значения токов, перегон между остановочными пунктами. Изменения в настройках системы и ввод данных перед началом движения производится путем считывания их с картриджа или через соответствующее меню с помощью клавиатуры. Работа с меню системы автоведения по сложности не превышает работу с меню мобильного телефона. Тесты работы аппаратуры системы автоведения и электровоза (электропоезда) также проводятся через меню. Диагностика в обязательном порядке проводится перед началом работы системы автоведения. В некоторых системах реализована функция самодиагностики аппаратуры в процессе движения.
Системы автоведения УСАВП могут работать в следующих режимах (см. ИСАВП-РТ): автоведение, советчика (подсказка), кнопочный контроллер. Во всех режимах система автоведения выводит на экран рекомендации по энергооптимальному ведению поезда и отображает текущую информацию о состоянии ведения.
Основой системы УСАВП является интеллектуальный центр системы автоведения – компьютер с программой, которая моделирует процессы ведения поезда, используя необходимую ин формацию, умеет им управлять и знает регламент ведения. Для моделирования процессов ведения поезда программа автоведения использует следующие данные:
- о текущем состоянии тягового подвижного состава – поступает с подвижного состава от датчиков;
- о составе (его масса, длина, количество вагонов и т.п.) – вводится автоматически или вручную перед началом работы;
- о маршруте следования – содержится в базе данных маршрутов;
- об ограничениях скорости – вводится из нормативных документов (приказ начальника дороги, постоянные и временные предупреждения).
Программа автоведения постоянно следит за меняющейся поездной обстановкой и выдает управляющие команды аппаратуре на тягу, торможение, подачу песка и т.д., ориентируясь на оптимальный расход электроэнергии.
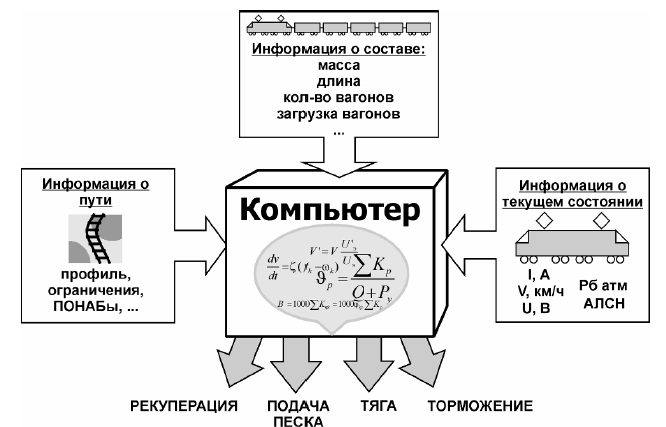
Рис.2. Принцип работы системы автоведения
Аппаратура системы УСАВП строится на основе блоков, осуществляющих управление подвижным составом (тяга, торможение, рекуперация), датчиков, фиксирующих ключевые показатели функционирования локомотива или моторного вагона, и управляющего компьютера. Блоки системы объединяются в одну общую CAN-сеть. Эта сеть позволяет согласовать друг с другом разнотипные устройства, предназначенные для организации распределенной обработки данных и подключать новые блоки. CAN-сеть нечувствительна к электромагнитным помехам и обладает высокой степенью надежности. При этом любое из подключенных устройств может быть использовано для передачи или получения информации. Полученные от систем локомотива аналоговые и дискретные сигналы обрабатываются, поступают в сеть и становятся доступными другим блокам системы.
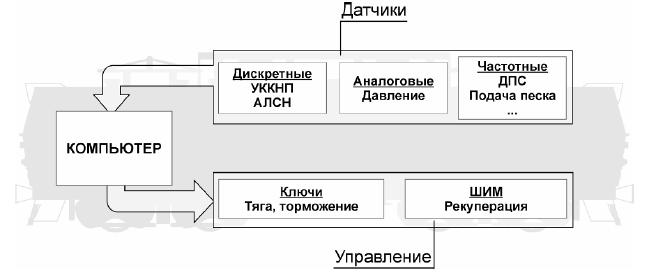
Рис.3. Взаимодействие аппаратуры системы автоведения
Основное устройство, которое несет в себе всю информацию о сети и координирует работу подключаемых модулей - системный блок БС, который представляет собой высокопроизводительный компьютер. Блок БС, исходя из полученных сообщений от устройств в CAN-сети, формирует команды на управление. Также в блоке БС содержится программа автоведения.
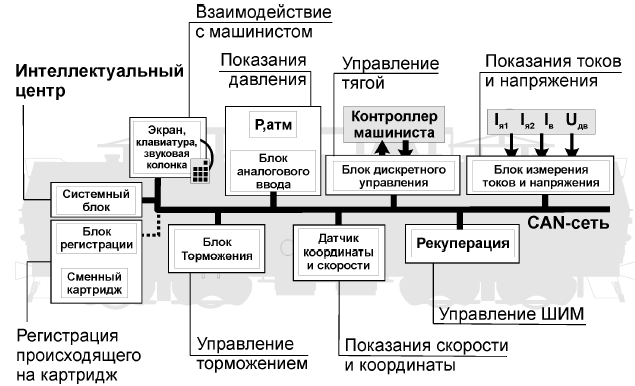
Рис.4. Аппаратура системы автоведения
В зависимости от типа локомотива и поставленной задачи подбирается требуемое количество и вид блоков. В общем виде аппаратура систем автоведения представлена на рисунке 4. Система автоведения УСАВП получает информацию о текущем состоянии поезда от измерительных устройств (датчиков). Для выполнения точного моделирования поведения поезда системе автоведения также необходимы сведения о параметрах состава для данной поездки (количество, типы вагонов и массы состава). Эти данные, а также информация о маршруте следования, временных ограничениях скорости, номере поезда и табельном номере машиниста вводятся перед отправлением в ручном или автоматическом режиме в систему автоведения (зависит от модификации системы автоведения). При автоматическом вводе используется съемный носитель данных(картридж), куда в депо предварительно записывается вся необходимая информация. База данных маршрутов содержит информацию о профиле пути, постоянных ограничениях скорости, расположении путевых объектов, объектов сигнализации, тяговых характеристиках локомотива и расписании движения (для пассажирских поездов). Данная информация постоянна и не может быть изменена без переналадки системы. База данных маршрутов записывается на картридж, либо загружается вместе с программой автоведения. Выбор маршрута из базы данных и ввод временных ограничений скорости производится машинистом перед отправлением.
Тормозная подсистема автоведения разработана для электронного управления пневматическими тормозами электровоза и поезда. Тормозная подсистема строится на основе высоконадежных электромагнитных клапанов типа КЭО. Пневмомодуль, содержащий три клапана, или отдельный клапан КЭО для отпуска устанавливаются на кран машиниста № 395 и осуществляют дистанционное управление режимами торможения, перекрыши и отпуска. Это тормозное оборудование унифицировано и применяется на всех типах пассажирских и грузовых электровозов, имеет низкую стоимость и обеспечивает надежность управления тормозами в автоматическом и ручном режимах.
В состав тормозной подсистемы УСАВП входят:
- кран машиниста № 395;
- пневмомодуль ПМ-07-03, объединяющего три электропневматических (ЭПВ) вентиля (клапана) - на электровозах, необорудованных САУТ;
- датчик давления на УР в каждой кабине (датчики давления в ТМ, ТЦ, НМ, задатчике ЭДТ (ЗТС));
- электромагнитный клапан КЭО 15/16/2 050/113;
- электромагнитный клапан КЭО 03/10/050/121;
- арматура подключения.
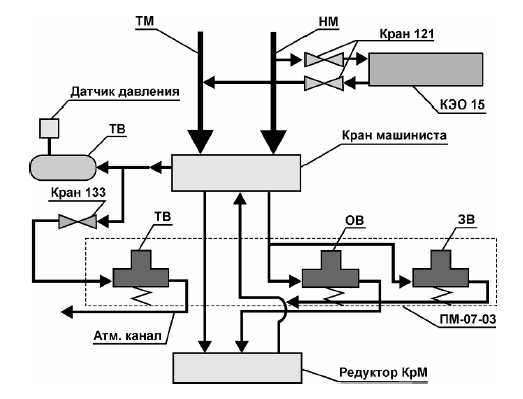
Рис.5. Тормозная подсистема
Система автоведения пассажирского электровоза (УСАВП-П) предназначена для автоматизированного управления электровозами ЧС2, ЧС2К, ЧС2Т, ЧС4Т, ЧС6, ЧС7, ЧС200, ЭП1 на основе расчёта в реальном времени и автоматической реализации энергосберегающих режимов движения. УСАВП-П позволяет повысить безопасность движения, с высокой точностью выполнить расписание следования поезда, обеспечить снижение расхода электроэнергии и облегчить труд машиниста. На основе данных об участке обслуживания и информации, принятой с борта электровоза система УСАВП - П обеспечивает:
- повышение безопасности движения за счет точного исполнения скоростного режима, включая временные ограничения скорости;
- соблюдение порядка и скоростного режима подъезда к местам ограничения скорости, светофорам и остановку поезда перед запрещающим сигналом светофора служебным торможением;
- расчёт оптимальной траектории движения и автоматический разгон поезда до расчетной скорости, поддержание оптимальной траектории движения;
- выработку сигналов в цепи управления локомотивом для дистанционного управления режимами тяги и торможения;
- соблюдение графика движения с точностью ± 1 мин (для скоростного движения ± 30с), различные варианты исполнения расписания;
- выдачу визуальной и речевой информации для машиниста, в соответствии с регламентом взаимной информации;
- стабилизацию расхода электроэнергии, её экономию за счет рационального выбора режимов движения поезда;
- автоматизированное тестирование электрических схем и пневмооборудования электровоза, системы автоведения, определение готовности локомотива к поездке;
- фиксирование объективных результатов поездки;
- существенное облегчение труда машиниста, и как следствие, повышение производительности труда.
Технические характеристики УСАВП-П:








