 2015-09-06
2015-09-06 2436
2436Принцип действия преобразователей основан на зависимости индуктивности или взаимной индуктивности обмоток на магнитопроводе от положения, геометрических размеров и магнитного состояния элементов их магнитной цепи.
Индуктивность обмотки, расположенной на магнитопроводе (рис. 4.1.8),  ,
,
где ZМ - магнитное сопротивление магнитопровода; vi – число витков обмотки.
Взаимная индуктивность двух обмоток, расположенных на том же магнитопроводе,  , где v1 и v2 – число витков первой и второй обмоток. Магнитное сопротивление определяется выражением
, где v1 и v2 – число витков первой и второй обмоток. Магнитное сопротивление определяется выражением  , где
, где  - активная составляющая магнитного сопротивления (рассеиванием магнитного потока пренебрегаем); li, si, mi – соответственно длина, площадь поперечного сечения и относительная магнитная проницаемость i – го участка магнитопровода; m0 – магнитная постоянная; d - длина воздушного зазора; s – площадь поперечного сечения воздушного участка магнитопровода; ХМ = Р / (w Ф2) – реактивная составляющая магнитного сопротивления; Р – потери в магнитопроводе, обусловленные вихревыми токами и гистерезисом; w - угловая частота; Ф – магнитный поток в магнитопроводе.
- активная составляющая магнитного сопротивления (рассеиванием магнитного потока пренебрегаем); li, si, mi – соответственно длина, площадь поперечного сечения и относительная магнитная проницаемость i – го участка магнитопровода; m0 – магнитная постоянная; d - длина воздушного зазора; s – площадь поперечного сечения воздушного участка магнитопровода; ХМ = Р / (w Ф2) – реактивная составляющая магнитного сопротивления; Р – потери в магнитопроводе, обусловленные вихревыми токами и гистерезисом; w - угловая частота; Ф – магнитный поток в магнитопроводе.
Приведенные соотношения показывают, что индуктивность и взаимную индуктивность можно изменять, например, воздействуя на длину d, сечение воздушного участка магнитопровода s, на потери в магнитопроводе и другими путями.
Этого можно достичь, например, перемещением подвижного сердечника (якоря) 1 (рис. 4.1.8) относительно неподвижного 2, введением немагнитной металлической пластины 3 в воздушный зазор и т.д.
На рис. 4.1.9 схематично показаны различные типы индуктивных преобразователей.
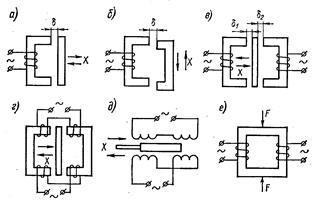 |
| Рис. 4.1.9 Индуктивные преобразователи с изменяющейся длиной зазора (а), с изменяющимся сечением зазора (б), дифференциальный (в), дифференциальный трансформаторный (г), дифференциальный трансформаторный с разомкнутой магнитной цепью (д) и магнитоупругий (е) |
Индуктивный преобразователь (рис. 4.1.9, а) с переменной длиной воздушного зазора d характеризуется нелинейной зависимостью L = f (d). Такой преобразователь обычно применяется при перемещениях якоря на расстояние 0,01 – 5 мм. Значительно меньшей чувствительностью, но линейной зависимостью L = f (s) отличаются преобразователи с переменным сечением воздушного зазора (рис. 4.1.9, б). Эти преобразователи используются при перемещениях якоря до 10 – 15 мм.
Якорь в индуктивном преобразователе испытывает усилие притяжения со стороны электромагнита, которое определяется производной от энергии магнитного поля по перемещению якоря:
 ,
,
где WМ – энергия магнитного поля; L – индуктивность преобразователя; I – ток, проходящий через обмотку преобразователя. Широко распространены индуктивные дифференциальные преобразователи (рис. 17.8, в), в которых под воздействием измеряемой величины одновременно и притом с разными знаками изменяются два зазора двух электромагнитов. Дифференциальные преобразователи в сочетании с соответствующей схемой (обычно мостовой) имеют более высокую чувствительность, чем обычные преобразователи, дают возможность уменьшить нелинейность функции преобразования, испытывают меньшее влияние внешних факторов. В этих преобразователях результирующее усилие на якорь со стороны электромагнитов меньше, чем в недифференциальных.
Для преобразования сравнительно больших перемещений (до 50 – 100 мм) применяются индуктивные преобразователи с незамкнутой магнитной цепью. На рис. 4.1.9, д схематически показано устройство дифференциального трансформаторного индуктивного преобразователя с незамкнутой магнитной цепью, используемого для передачи показаний различных неэлектрических приборов (манометров, дифференциальных манометров). Применяются также индуктивные дифференциальные преобразователи трансформаторного типа (рис. 4.1.9, г), в которых две секции первичной обмотки включены согласно, а две секции вторичной обмотки – встречно. При питании первичной обмотки переменным током и при симметричном положении якоря относительно электромагнитов ЭДС на выходных зажимах равна нулю. При перемещении якоря возникает сигнал на выходных зажимах. Если ферромагнитный сердечник преобразователя подвергать механическому воздействию F, то вследствие изменения магнитной проницаемости материала сердечника m изменится магнитное сопротивление цепи, что повлечет за собой изменение индуктивности L и взаимной индуктивности М обмоток. На этом принципе основаны магнитоупругие преобразователи (рис. 4.1.9, е).
Конструкция преобразователя определяется главным образом значением измеряемого перемещения. Габариты преобразователя выбирают, исходя из необходимой мощности выходного сигнала и других технических требований.
Для измерения выходного параметра индуктивных преобразователей наибольшее применение получили мостовые схемы (равновесные и неравновесные), а также компенсационная схема (в автоматических приборах) для дифференциальных трансформаторных преобразователей.
Индуктивные преобразователи используются для преобразования перемещения и других неэлектрических величин, которые могут быть преобразованы в перемещение (усилие, давление, момент и т.д.).
По сравнению с другими преобразователями перемещения индуктивные преобразователи отличаются значительными по мощности выходными сигналами, простотой и надежностью в работе.
Недостатком их является наличие обратного воздействия преобразователя на измеряемый объект (воздействие электромагнита на якорь) и влияние инерции якоря на частотную характеристику прибора.

