 2014-02-13
2014-02-13 3343
3343Принцип действия и конструкция. Индуктивный преобразователь представляет собой катушку индуктивности (дроссель), полное сопротивление которой изменяется при взаимном относительном перемещении элементов магнитопровода. Имеются две группы преобразователей: с изменяющейся индуктивностью и с изменяющимся активным сопротивлением. Пример схемы преобразователя первой группы показан на рис. 12. Преобразователь состоит из П-образного магнитопровода на котором размешена катушка 2, и подвижного якоря 3. При перемещении якоря изменяется длина воздушного зазора и, следовательно, магнитное сопротивление, что вызывает изменение индуктивности дросселя. Другая широко используемая модификация (плунжерный преобразователь) показана на рис. 12. Преобразователь представляет собой катушку /, из которой может выдвигаться ферромагнитный сердечник 2 (плунжер). При среднем положении плунжера индуктивность максимальна.
Схема преобразователя второй группы приведена на рис. 12. В зазор магнитной цепи / вводится пластинка 2 с высокой электропроводностью, в которой наводятся вихревые токи, приводящие к увеличению потерь активной мощности катушки 3. Это эквивалентно увеличению ее активного сопротивления.
Функция преобразования преобразователя рис. 12с некоторыми допущениями может быть получена следующим образом. Как известно, индуктивность катушки
L=wФ/I (22)
Ток связан с МДС HI соотношением
L=Hl/w (23)
Индуктивный преобразователь является электромагнитом, его сила притяжения, возрастающая с увеличением чувствительности, нелинейно зависит от перемещения якоря и может явиться причиной погрешности преобразователя, предшествующего индуктивному.
Описанные одинарные индуктивные преобразователи имеют ряд недостатков: их функции преобразования нелинейны; аддитивные погрешности, в частности погрешность реального преобразователя, вызванная температурным изменением активного сопротивления обмотки, велики; сила притяжения якоря значительна.
Схемы включения. Основными дифференциальными схемами включения индуктивных преобразователей являются мостовые схемы (рис.12 ), где в общем случае Z1=Rпр+jwL1 и Z2=Rпр+jwL2 — полные сопротивления секций дифференциальных индуктивных преобразователей. Сопротивления других плеч могут быть как активными, так и реактивными. В качестве этих плеч могут служить секции двух-обмоточного дросселя (рис. 12 ) или трансформатора с двухсекционной первичной обмоткой (рис. 12 ).
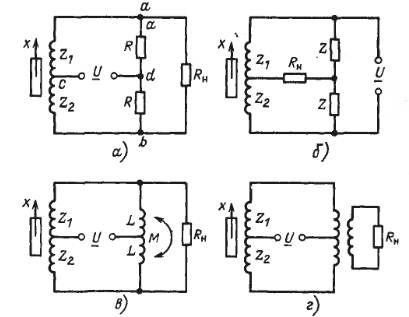
Рис 12
Источник питания U и нагрузка RH могут меняться местами (рис 12, а и б), при этом чувствительность моста также изменяется.
Погрешность индуктивных преобразователей. Температурная погрешность индуктивных преобразователей в основном обусловлена изменением активной составляющей их сопротивления. Эта погрешность аддитивна и уменьшается в случае применения мостовых схем. Кроме того, при изменении температуры изменяется магнитная проницаемость стали, что приводит к некоторому дополнительному изменению аддитивной и мультипликативной погрешностей.
При изменении напряжения питания меняется магнитная проницаемость магнитопровода преобразователя, а следовательно, его сопротивление и чувствительность. Изменяется также чувствительность мостовой измерительной цепи. Изменение сопротивления приводит к аддитивной погрешности и компенсируется мостовой цепью. Изменение чувствительности создает мультипликативную погрешность. Для ее уменьшения либо стабилизируют напряжение источника питания моста,либо применяют компенсационные схемы измерения.
Изменение частоты питающего напряжения приводит к изменению сопротивления резисторов, включенных в мост, и меняет чувствительность. Малую погрешность имеют мостовые схемы, у которых чувствительность в режиме холостого хода не зависит от параметров цепи. У других схем для уменьшения погрешности нужно стабилизировать частоту питающего напряжения.
При перемещении якоря преобразователя изменяется выходное напряжение моста. Однако практически имеется небольшое напряжение, что приводит к аддитивной погрешности измерительного моста. Для балансировки мостов переменного тока необходима раздельная регулировка действительной и мнимой составляющих его выходного напряжения. В мостах с индуктивными преобразователями одна составляющая регулируется перемещением якоря преобразователя, другая — путем регулировки других сопротивлений (например, сопротивлений R в схеме рис. 12). Если регулировка сделана недостаточно тщательно, то изменением положения якоря нельзя полностью сбалансировать схему.

