 2015-09-06
2015-09-06 400
400У складі електроблока комплексу є схема перекидання, яка підключається при певному (пороговому) значенні електричного сигналу з реостата вертикального наведення. При її підключенні на вхід підсилювача розвантаження в електроблок подається додатковий електричний сигнал, який після посилення поступає на обмотку управління двигуна стабілізації МЗ (рис. 1.15).
Двигун стабілізації (датчик моменту) МЗ створює по осі стабілізації (вісь У) електромагнітний момент, під дією якого гіровузол поплавкового гіроскопа 1 процесує (відхиляється) по осі процесії Z до упору осі в один із упорів.
Індукційний датчик кута ИД поплавкового гіроскопа 1 (рис. 1.15) при цьому видає на вхід підсилювача розвантаження електричний сигнал, рівний додатковому (створеному схемою перекидання), але протилежний по фазі. В результаті на вході підсилювача розвантаження сумарний електричний сигнал стає рівним нулю, електромагнітний момент двигуна стабілізації МЗ «знімається» (зменшується до мінімального значення). Гіровузол поплавкового гіроскопа опиняється під впливом пружної сили пружини одного з упорів (залежно від напряму перекидання лінії прицілювання). Ця сила прагне повернути гіровузол навколо осі Z, тобто змінити положення у просторі головної осі гіроскопа (вісь X на рис. 1.15), і викликає появу гіроскопічного моменту.
Проте гіроскопічний момент прикладений не до самого гіроскопа (конкретніше, гіромотора М1), а до корпуса поплавкового гіроскопа, на якому встановлені згадані підпружинені упори, який, діючи на гіроскоп, примушує його змінювати положення головної осі.
З правила визначення напряму дії гіроскопічного моменту можна зробити висновок, що вектор гіроскопічного моменту, направлений по осі Y (осі стабілізації), прикладений у вигляді пари сил до підшипників опори гіровузла поплавкового гіроскопа 1. Ця пара сил викликає обертання (поворот) корпуса поплавкового гіроскопа, а відповідно, і гірорами навколо осі Y. Через кінематичний ланцюг поворот гірорами передається на головне дзеркало 2 головки, що зумовлює переміщення у вертикальній площині стабілізованої лінії прицілювання (візування) зі швидкістю перекидання.
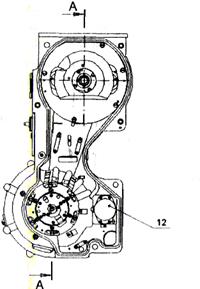
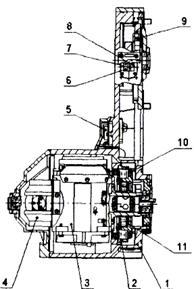
Рис. 1.16. Гіроскопічний стабілізатор комплекса ПНК-4СR:
1 – корпус; 2 – ротор АДФМ-1000; 3 – гірорама; 4 – корпус з гіромотором;
5 – електронне реле; 6, 7, 8 – пакет змінних резисторів; 9 – тримач;
10 – статор АДФМ-1000; 11– статор СКТ-265
Гіростабілізатор комплексу ПНК-4СR – окремий вузол (рис. 1.16), який стикується з корпусом прицільного блока.
У корпусі 1 на підшипниках встановлена гірорама 3, пов'язана через стрічкову передачу з утримувачем 9 (блок шківів), на якому є опори (шарніри) для вилок важелів головки. Гірорама 3 – це корпус, в який встановлено двоступеневий поплавковий гіроскоп, на якому закріплені ротор 2 двигуна стабілізації АДФМ-1000, ротор синусно-косинусного трансформатора СКТ-265 (ТрВ1 на рис. 1.15) і корпус 4 з гіромотором ГМА-4 (М1' на рис. 1.15). В корпусі 1 гіростабілізатора за допомогою обойми закріплені статор 10 двигуна стабілізації АДФМ-1000, статор 11 синусно-косинусного трансформатора СКТ-265.
У корпусі 1 встановлений електромагнітний механізм стопоріння (аретир), приводом якого є електромагніт 12. У корпусі 1 гіростабілізатора також встановлено електронне реле 5. На корпусі гіростабілізатора під кришкою встановлений пакет змінних резисторів 6, 7, 8 (R4, R5, R6), з яких R4 служить для компенсації постійної складової швидкості відведення гіростабілізатора; R5 і R6 – для регулювання кутових швидкостей перекидання лінії прицілювання (візування) відповідно вгору і вниз.
Загальний вигляд гірорами гіростабілізатора ПНК-4СR представлений на рис. 1.17.
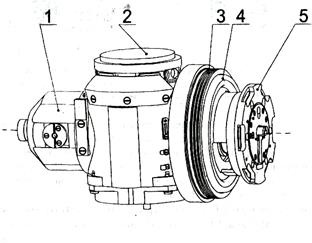
Рис. 1.17. Гірорама:
1 – корпус з гідромотором; 2 – поплавковий гіроскоп; 3 – ротор АДФМ-1000;
4 – статор АДФМ-1000; 5 – кільце обойми
Конструктивно вона складається з декількох основних вузлів. Основу складає корпус гірорами. До корпуса прикріплено дві півосі. Ліва піввісь виконана як єдине ціле з корпусом 1 (рис. 1.17) гіромотора. Права піввісь виконана порожнистою. В ній розташовані елементи напругопідвідного вузла (рис. 1.16). На рис. 1.17 права піввісь закрита елементами обойми з кільцем 5. Через кільце 5 обойма кріпиться до корпуса гіростабілізатора.
В обоймі встановлений статор 4 двигуна стабілізації АДФМ-1000 (ротор 3 закріплений на корпусі гірорами), статор синусно-косинусного поворотного трансформатора СКТ-265 і зовнішні кільця двох кулькопідшипників, що складають праву сторону підвісу гірорами.
Ліву сторону підвісу гірорами складають два кулькопідшипники, встановлені внутрішніми кільцями на ліву піввісь. Їх зовнішні кільця встановлюються в посадочні гнізда, що знаходяться в кришці (зліва, рис.1.16) корпуса гіростабілізатора.
Гіроскопічний стабілізатор прицілу забезпечує стабілізацію поля зору і наведення стабілізованої лінії прицілювання (візування) в діапазоні кутів від -20° до +30° у вертикальній площині з кутовими швидкостями наведення від 0,05°/с (мінімальна) до 3,5°/с (максимальна), а також перекидання стабілізованої лінії прицілювання з кутовою швидкістю 16-24°/с.
Похибка стабілізації лінії прицілювання при русі танка по пересіченій місцевості не перевищує однієї кутової хвилини (0,3мрад), а кутова швидкість самовідведення лінії прицілювання (прицільної марки) при стабілізованому спостереженні в умовах руху танка не перевищує 1°/хв.
Вимірювання дальності до цілі за допомогою прицілу ТКН-4СR
Вимірювання дальності командиром здійснюється при спостереженні в приціл ТКН-4СR методом «з базою на цілі»:
- при спостереженні в багатократний денний канал за допомогою далекомірних шкал (рис. 1.12), розташованих у правій частині поля зору.
Шкали дозволяють вимірювати дальність до цілі заввишки 2,5 м – у межах від 1000 до 4000 м і 2 м – у межах від 500 до 4000 м;
- при спостереженні в нічний канал за допомогою коротких штрихів і прицільної марки поля зору (рис. 1.13).
При цьому якщо ціль заввишки 2,5 м розміщується по висоті між вершиною прицільної марки і верхнім (нижним) коротким штрихом, то дальність до цілі складає 800 м (400 м).
Вимірювання дальності до цілі висотою 1 м при стрільбі з кулемета вдень здійснюється за допомогою шкали кутів прицілювання для кулемета, при цьому якщо ціль разміщується по висоті в розмір кутика 8, нанесеного на цій шкалі, то дальність – 800 м.
Решта кутиків при вимірюванні дальності не використовуются.
При стрільбі з кулемета вночі вимірювання дальності до цілі висотою 1 м здійснюється за допомогою шкали кутів прицілювання для кулемета, при цьому якщо зображення цілі уміщається в розмір марки шкали, поряд з якою знаходиться цифра 8, то відстань до цілі – 800 м.
Кутики 1,4 та 0,5 для вимірювання дальності не використовуються.
Електроблок прицілу ТКН-4СR встановлений зверху, на командирській башточці.








