 2015-09-06
2015-09-06 4872
4872В состав бортовой аппаратуры входят (на 1 локомотив):
- бортовой контроллер БК -1 шт.;
- блок индикации и управления - 1шт.;
- локомотивный светофор ЛС- 1 шт.;
- блок согласования БС - 1 шт.;
- блок переключателя БП - 1 шт.;
- датчик импульсов -2 шт.;
- соединительные жгуты к бортовой аппаратуре - 1 компл.
В состав аппаратуры командной радиолинии входят:
- радиомодем - 2 шт.;
- антенное устройство - 2 шт.
В состав постовой аппаратуры входят:
- постовой УВК в составе одного постового контроллера,
одного БДР и одного ЦР8;
АРМ ДСП: ПЭВМ РС/АТ - 1шт., Принтер -1 шт., ЦР8 - 1шт.
МАЛС
Система маневровой автоматической локомотивной сигнализации (МАЛС) предназначена для обеспечения безопасности производства маневровых работ на железнодорожных станциях и запрета движения локомотива (состава) со скоростью выше допустимой согласно ПТЭ (Правила технической эксплуатации), "Инструкции по маневровой работе" и ТРА (Технико-распорядительный акт) станции, а также для автоматической остановки локомотива (состава) перед закрытым сигналом или местом производства работ.
Система МАЛС, на сегодняшний день, является безальтернативным средством обеспечения безопасности движения при: маневровых работах, перевозке опасных грузов, с высокой надёжностью исключающим превышение скорости, проезд запрещающих сигналов, взрез стрелок. Применение этой системы позволяет исключить столкновения вагонов и локомотивов на станциях и предотвратить возникновение аварий, имеющих место на ряде железных дорог из-за ошибок обслуживающего персонала.
Цифровой радиоканал связи системы МАЛС совместно с производительной ЭВМ (СФ МАЛС) обеспечивает оперативность управления локомотивами и слежение за их местонахождением, недостижимую другими средствами.
Система МАЛС, обеспечивает выполнение следующих функций:
- защита ПО системы от несанкционированного доступа;
сопровождение работы системы голосовыми сообщениями (станционная аппаратура);
ввод информации о ТРА станции;
- прием от устройств ЭЦ (электрическая централизация) информации о состоянии
рельсовых цепей, светофоров и положении стрелок;
ввод информации о локомотиве;
- контроль положения контроллера локомотива;
контроль скатывания;
- измерение фактической скорости и направления движения локомотива;
ввод и вывод локомотивов из системы;
- обмен сообщениями по цифровому радиоканалу связи между станционными устройствами и локомотивами, оборудованными системой МАЛС;
идентификация и определение соответствия маршрута и локомотива;
задание, продление, укорочение и отмена маршрутного задания;
срздание маршрутов под запрещающий сигнал;
установку и снятие места производства работ на любом элементе станции;
- остановка локомотива по приказу ДСП, при потере связи, отмене маршрута;
- контроль кратковременной потери связи и сохранение передаваемой информации;
контроль допустимой скорости движения при выполнении маршрутных заданий; разборка тяги при приближении фактической скорости движения к допустимой скорости;
- контроль ограничения скорости на местах производства работ;
- подтверждение машинистом видимости вагонов на занятом пути и мест
производства работ;
- смена режимов работы локомотива по приказу станционных устройств и запросу
машиниста локомотива;
измерение длины состава;
- определение расстояния до мест производства работ;
контроль не проезда "хвостом" состава последнего пройденного стыка в маршрутном задании;
- контроль движения состава в пределах последней занятой секции маршрутного
задания относительно его "головы" и "хвоста";
выполнение приказов ДСП на проезд запрещающего сигнала;
выполнение маршрутов за пределы станции с выводом локомотива из системы;
включение проверки бдительности машиниста при проследовании мест с ограничениями;
включение проверки бдительности машиниста при вступлении на занятый путь;
срыв ЭПК при неисправностях локомотивной аппаратуры;
срыв ЭПК при несоблюдении допустимых скоростей движения кривой торможения;
- срыв ЭПК при превышении допустимой скорости движения;
срыв ЭПК при выключении локомотивной аппаратуры;
срыв ЭПК при подъезде к препятствию или месту работ, если от машиниста нет подтверждения о свободное™ пути;
срыв ЭПК при попытке проезда запрещающего сигнала;
- срыв ЭПК при попытке проезда последнего стыка при типе маршрута "за
сигнал";
- срыв ЭПК при попытке проезда стыков в пределах занимаемой изолированной
секции;
срыв ЭПК по приказу станционных устройств или ДСП; регистрация смен ДСП в журнале системы МАЛС; запись в журнале системы МАЛС событий происшедших на станции; запись в журнале системы МАЛС функционального состояния локомотивной аппаратуры.
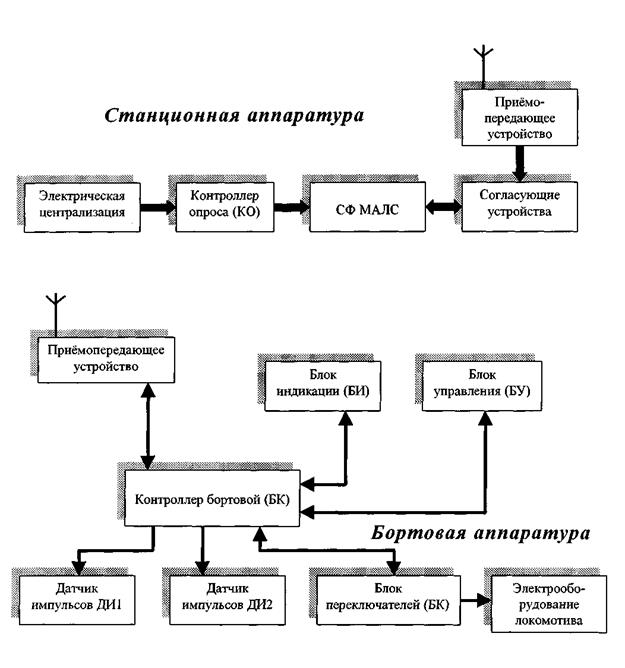 |
В состав системы МАЛС входят станционная и локомотивная аппаратура.
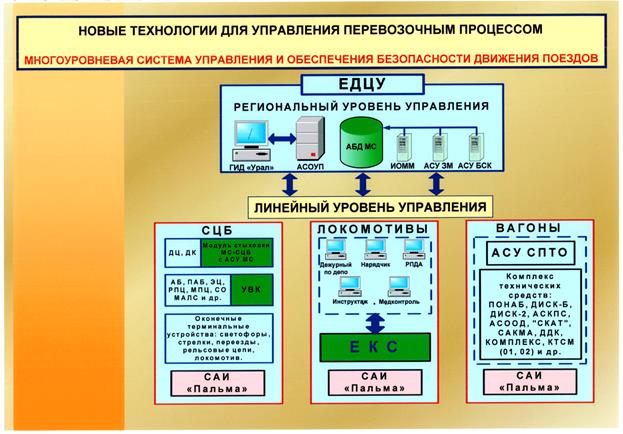
ЕКС
Единая комплексная система управления и обеспечения безопасности движения поездов внедряется на основании Указание МПС России № 191У от 29 ноября 2002 г.
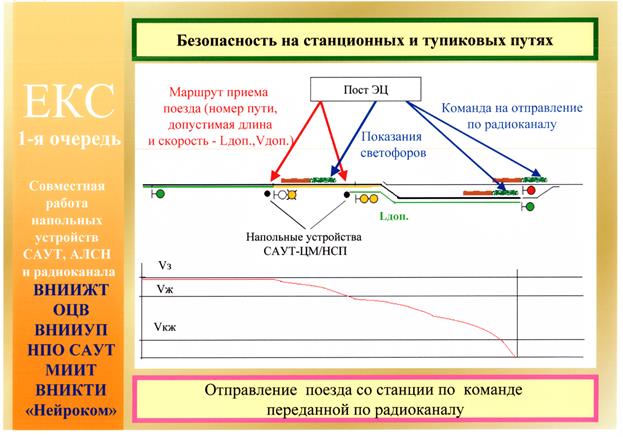
ЕКС предназначена для:
· энергооптимального ведения поезда по участку с соблюдением расписания для обеспечения безопасного интервала следования поездов по графику;
· предупреждения проездов запрещающих сигналов;
· предупреждения превышения допустимых скоростей и продольных динамических усилий в грузовом поезде;
· контроля бдительности и бодрствования машиниста;
· выполнения постоянных и временных ограничений скорости;
· исключения несанкционированного движения и скатывания;
· исключения движения при несанкционированном отключении машинистом системы ЕКС;
· контроля режимов работы
· контроля технического состояния тормозной системы;
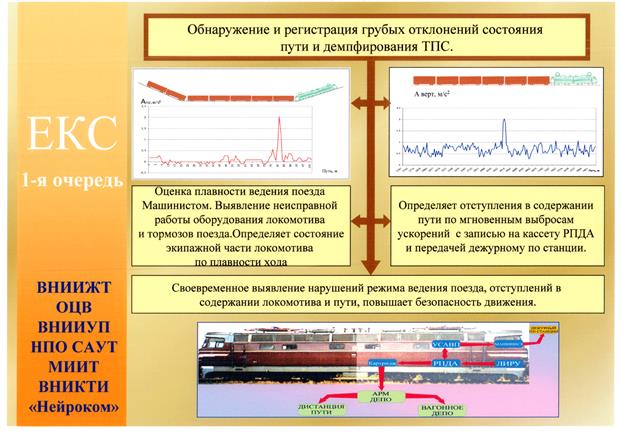
· регистрации грубых отступлений в содержании железнодорожного пути;
· регистрации параметров движения;
· регистрации действий локомотивной бригады;
· остановки поезда по радиоканалу.
СОСТАВ СИСТЕМЫ:
Единая комплексная система управления и обеспечения безопасности движения поездов (ЕКС) создается на базе трех объединенных на программно-интерфейсном уровне подсистем
· автоматизированного энергооптимального и безопасного ведения поезда по расписанию (УСАВП, 1-я подсистема);
· автоматического управления служебным торможением (САУТ-ЦМ 2-я подсистема)
· комплексного локомотивного устройства безопасности (КЛУБ-У с ТСКБМ, 3-яподсистема, построенная по принципам безопасности) с функциями обмена с устройствами СЦБ и радиосвязью.


УСАВП
БОРТОВАЯ МИКРОПРОЦЕССОРНАЯ СИСТЕМА АВТОВЕДЕНИЯ ПАССАЖИРСКОГО ЭЛЕКТРОВОЗА
В последние годы большое развитие получила система УСАВП разрабатываемая и внедряемая Отраслевым Центром Внедрения и ВНИИЖТ.
Назначение системы - автоматизированное управление электровозом пассажирского движения с целью точного выполнения времени хода при условии выбора энергетически рациональных режимов движения. Расчет энергетически оптимальной траектории осуществляется на борту в реальном масштабе времени с учетом оперативной обстановки в процессе движения поезда.
Система автоведения имеет два основных режима работы:
· автоматизированное ведение поезда;
· советчик машиниста по оптимальным режимам ведения при ручном управлении.

СОСТАВ УСАВП:
· блок центрального процессора и индикации (ЦПИ);
· блок коммутации и сопряжения (КС);
· устройство включения системы;
· блок клавиатуры;
· датчиков угла поворота (ДПС),
· датчиков давления;
· блок измерения, включающий в себя гальванически развязанные
датчики тока и напряжения;
· 4- модуля регистрации энергетических параметров электровоза и параметров движения с внешним картриджем.
Система УСАВП имеет несколько модификаций и используется на электропоездах, пассажирских и грузовых электровозах. Она является одним из основных компонентов при построении Единой комплексной системы.
КСД
Комплексная система диагностики
Система создается в условиях крайне ограниченного обновления парка локомотивов, выработки частью ТПС своего срока службы, значительного увеличения интенсивности использования локомотивов и освоение все возрастающего объема перевозок. С внедрением КСД значительно увеличатся пробеги между ремонтами, сократится время нахождения в планово-
предупредительном ремонте, снизятся затраты трудовых и материальных ресурсов на содержание локомотивного парка.
На первом этапе внедрения КСД создана бортовая систему КСД-БЭ. Аппаратная часть КСД-БЭ выполнена на базе унифицированной системы автоведения (УСАВПГ) и регистратора параметров движения (РПДА-ПГ) авто-ведения грузового электровоза.
Интеграция КСД-БЭ с системами УСАВПГ и РПДА-ПГ позволяет информационно «насытить» систему диагностирования данными о событиях в их соответствии с координатами времени и пути движения поезда.
КСД-БЭ выполняет следующие функции:
- измерение и преобразование значений контролируемых параметров;
- передача информации в блоки обработки и преобразования;
- обмен информацией между блоками системы;
- обработка информации по алгоритмам диагностирования;
- отображение информации локомотивной бригаде о состоянии основного обо
рудования;
- накопление диагностической информации для последующей обработки в спе-
циализированных стационарных АРМах;
- формирование команд управления УСАВПГ установлено оборудованием электровоза для исключения работы в недопустимых режимах.
На каждой секции электровоза дополнительно к аппаратуре следующее оборудование:
- специализированные датчики;
- линейно-кабельное оборудование;
- блоки первичной обработки и преобразования диагностической информации;
- локомотивный индикатор и регистратор продольных, поперечных и верти
кальных ускорений (ЛИР У) разработки ОЦВ;
- аппаратура контроля температуры подшипниковых узлов КМБ (БСКТ) раз
работки ЦВНТиТ «Транспорт ».
КСД-БЭ позволяет обеспечить:
- уменьшение количества отказов, увеличение срока службы основного обору
дования электровозов на 3-5%;
- уменьшение времени занятости перегонов при нештатных ситуациях за
счёт сокращения времени отыскания возникшего в пути следования отказа
на 5-7%;
- повышение безопасности движения по факторам, зависящим от техниче
ского состояния оборудования электровозов;
- улучшение условий труда локомотивных бригад;
- уменьшение расхода электроэнергии на тягу
- сокращение затрат на устранение отказов локомотива при неплановых ре
монтах, ТО и ТР до 6-9%;
- уменьшение потерь, связанных с простоем локомотивов на ТО и ТР до 7-9%;
- информационное обеспечение в сфере эксплуатации и ремонта;
- анализ состояния пути.


