 2015-09-06
2015-09-06 7645
7645Активная мощность. Чтобы установить, как зависит активная мощность Р синхронной машины от угла нагрузки θ, рассмотрим упрощенные векторные диаграммы (рис. 1.34), построенные при r а = 0. Для неявнополюсной машины из диаграммы (рис. 1.34, а) можно установить, что общая сторона АВ треугольников ОАВ и АСВ

или с учетом модулей соответствующих векторов
 . (1.32)
. (1.32)
Следовательно, активная мощность машины
 . (1.33а)
. (1.33а)
Для явнополюсной машины следует исходить из векторной диаграммы, приведенной на рис. 1.34, б. Так какφ = ψ – θ,то активная мощность
 . (1.33б)
. (1.33б)
Чтобы определить токи Id и Iq, спроектируем модули векторов э. д. с. Ė 0, напряжения Ù и падений напряжения – jİdxd и – jİqxq на оси, параллельную и перпендикулярную вектору Ė 0(см. рис. 1.34, б). Тогда получим E 0 = U cosθ + Idxd и U sinθ = Iqxq, откуда
 ;
;  . (1.34)
. (1.34)
Подставляя значения Id и Iq в (1.33б), получим

или, используя формулу sin2θ = 2 sinθ·cosθ,
 .
.
Электромагнитный момент. В синхронных машинах большой и средней мощности потери мощности в обмотке якоря Δ Pa эл = mIa2ra малы по сравнению с электрической мощностью Р, отдаваемой (в генераторе) или потребляемой (в двигателе) обмоткой якоря. Поэтому если пренебречь величиной Δ Pа эл, то можно считать, что электромагнитная мощность машины Р эм = Р.
Электромагнитный момент пропорционален мощности Р эм. Поэтому для неявнополюсной и явнополюсной машин:
 ; (1.35а)
; (1.35а)
 . (1.35б)
. (1.35б)
Первый член формулы (1.35б) физически представляет собой основной момент, получающийся в результате взаимодействия вращающегося магнитного поля с током ротора, а второй член–так называемый реактивный момент, возникающий из-за стремления ротора ориентироваться по оси результирующего поля. Последний существует даже при отсутствии тока возбуждения (когда E 0 = 0). В частном случае неявнополюсной машины, когда xd = xq = х сн,формула (1.35б) принимает вид формулы (1.35а).
При неявнополюсной машине зависимость М = f (θ) представляет собой синусоиду, симметричную относительно осей координат (рис. 1.35, кривая 1). При явнополюсной машине из-за неодинаковой магнитной проводимости по различным осям (хd ≠ хq)возникает реактивный момент
 , (1.36)
, (1.36)
в результате чего зависимость М = f (θ) несколько искажается (кривая 2). Реактивный момент, как следует из (1.35б), пропорционален sin2θ (кривая 3). Так как электромагнитная мощность Р эм пропорциональна моменту, то приведенные на рис. 1.35 характеристики представляют собой в другом масштабе зависимости Р эм = f (θ) или при принятом предположении (Δ Ра эл= 0) зависимости P = f (θ);их называют угловыми характеристиками.
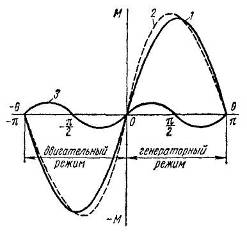
Рис. 1.35 – Угловые характеристики электромагнитного момента М для явнополюсной и неявнополюсной машин
Форма кривой М = f (θ) обусловлена тем, что потоки  и
и  сдвинуты между собой на тот же угол θ, что и векторы Ė 0и Ù (векторы и опережают Ė 0и Ù на 90°). Поэтому если угол θ = 0 (холостой ход), то между ротором и статором существуют только силы притяжения f, направленные ра-диально (рис. 1.36, а), и электромагнитный момент равен нулю. При θ > 0 (генераторный режим) ось потока возбуждения Фв (полюсов ротора) опережает ось суммарного потока ∑Ф на угол θ (рис. 1.36, б), вследствие чего электромагнитные силы f, возникающие между ротором и статором, образуют тангенциальные составляющие, которые создают тормозной момент М. Максимум момента соответствует значению θ = 90°, когда ось полюсов ротора расположена между осями суммарного потока статора.
сдвинуты между собой на тот же угол θ, что и векторы Ė 0и Ù (векторы и опережают Ė 0и Ù на 90°). Поэтому если угол θ = 0 (холостой ход), то между ротором и статором существуют только силы притяжения f, направленные ра-диально (рис. 1.36, а), и электромагнитный момент равен нулю. При θ > 0 (генераторный режим) ось потока возбуждения Фв (полюсов ротора) опережает ось суммарного потока ∑Ф на угол θ (рис. 1.36, б), вследствие чего электромагнитные силы f, возникающие между ротором и статором, образуют тангенциальные составляющие, которые создают тормозной момент М. Максимум момента соответствует значению θ = 90°, когда ось полюсов ротора расположена между осями суммарного потока статора.
При θ < 0 (двигательный режим) ось потока возбуждения отстает от оси суммарного потока (рис. 1.36, в), вследствие чего тангенциальные составляющие электромагнитных сил, возникающих между ротором и статором, создают вращающий момент.
Условия статической устойчивости. Угловая характеристика синхронной машины имеет важное значение для оценки ее статической устойчивости и степени перегружаемости. Под статической устойчивостью
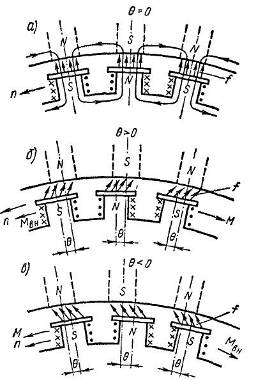
Рис. 1.36 – Картина взаимодействия потоков Фв и ∑Ф в синхронной машине
синхронной машины, работающей параллельно с сетью, понимается ее способность сохранять синхронное вращение (т.е. условие n 2 = n 1)при изменении внешнего вращающего момента М вн, приложенного к его валу. Статическая устойчивость обеспечивается только при углах θ, соответствующих М < М макс.
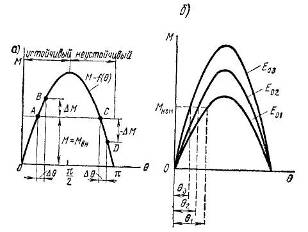
Рис. 1.37 – Зоны устойчивой и неустойчивой работы на угловой характеристике синхронного генератора (а) и угловые характеристики при различных токах возбуждения (б)
Рассмотрим более подробно этот вопрос. Допустим, что генератор работает при некотором внешнем моменте М вн, передаваемом его ротору от первичного двигателя. При этом ось полюсов ротора сдвинута на некоторый угол θ относительно оси суммарного потока ∑Ф и машина развивает электромагнитный момент М, который можно считать равным М вн(рис. 1.37, а, точки А и С). Если момент М внвозрастает, то ротор генератора ускоряется, что приводит к увеличению угла θ до θ + Δθ. При работе машины в точке А возрастание угла θ вызывает увеличение электромагнитного момента до величины М + Δ М (точка В); в результате равновесие моментов, действующих на вал ротора, восстанавливается и машина после некоторого колебательного процесса продолжает работать с синхронной частотой вращения. Аналогичный процесс имеет место и при уменьшении М вн;при этом соответственно уменьшаются угол θ и момент М, а следовательно, равновесие моментов также восстанавливается. Однако если машина работает при π/2 < θ < π
(точка С), то увеличение угла θ вызывает уменьшение электромагнитного момента до величины М – Δ M (точка D).В результате равновесие моментов, действующих на вал ротора, нарушается, ротор продолжает ускоряться, а угол θ–возрастать. Возрастание угла θ может привести к двум результатам: 1) машина перейдет в точку устойчивой работы (аналогичную точке А) на последующих положительных полуволнах; 2) ротор по инерции проскочит устойчивые положения и произойдет выпадение из синхронизма, т.е. ротор начнет вращаться с частотой, отличающейся от частоты вращения магнитного поля статора.
Выпадение из синхронизма является аварийным режимом, так как оно сопровождается протеканием по обмотке якоря больших токов. Это объясняется тем, что э.д. с. генератора Е и напряжение сети U cпри указанном режиме могут складываться по контуру «генератор–сеть», а не вычитаться, как при нормальной работе.
Если внешний момент по какой-либо причине снижается, то при работе машины в точке С угол θ уменьшается, возрастает электромагнитный момент, что приводит к дальнейшему уменьшению угла θ и переходу к работе в устойчивой точке А.
Из рассмотрения рис. 1.37, а следует, что синхронная машина работает устойчиво, если dM/dθ > 0, и неустойчиво, если dM/dθ < 0; чем меньше угол θ, тем более устойчиво работает машина.
Если машина работает в установившемся режиме при некотором угле θ, то малое отклонение Δθ от этого угла сопровождается возникновением момента Δ M = (dM/dθ) Δθ, который стремится восстановить исходный угол θ. Этот момент называют синхронизирующим. Ему соответствует понятие синхронизирующей мощности Δ P эм = (dP эм /dθ) Δθ.
Производные dM/dθ и dP эм /dθ называют соответственно коэффициентами синхронизирующего момента и синхронизирующей мощности (иногда их называют удельным синхронизирующим моментом и удельной синхронизирующей мощностью). При неявнополюсной машине
 ;
;  .
.
Коэффициент синхронизирующего момента имеет максимальное значение при θ = 0 и уменьшается с возрастанием θ; при θ ≈ π/2 он обращается в нуль, поэтому синхронные машины обычно работают с θ = 20÷35°, что соответствует двукратному или несколько большему запасу по моменту.
Статическая перегружаемость синхронной машины оценивается отношением
 . (1.37)
. (1.37)
Согласно ГОСТу это отношение для турбогенераторов и гидрогенераторов должно быть не менее 1,6–1,7, а для синхронных двигателей большой и средней мощности – не менее 1,65.
Коэффициент синхронизирующего момента имеет максимальное значение при θ = 0 и уменьшается с возрастанием θ; при θ ≈ π/2 он обращается в нуль, поэтому синхронные машины обычно работают с θ = 20 ÷ 35°, что соответствует двукратному или несколько большему запасу по моменту.
Статическая перегружаемость синхронной машины оценивается отношением
Согласно ГОСТу это отношение для турбогенераторов и гидрогенераторов должно быть не менее 1,6 – 1,7, а для синхронных двигателей большой и средней мощности – не менее 1,65.
Влияние тока возбуждения на устойчивость. Устойчивость генератора при заданной величине активной мощности, отдаваемой в сеть, зависит от тока возбуждения. При увеличении тока возбуждения возрастает э.д.с. Е 0и, следовательно, момент М макс; при этом увеличивается устойчивость машины.
На рис. 1.37, б изображены угловые характеристики М = f (θ) при различных токах возбуждения (при различных Е 0 ), откуда следует, что чем больше ток возбуждения, тем меньше угол θ при заданной нагрузке, а следовательно, тем больше отношение М макс /М ном и перегрузочная способность генератора.
Обычно электрическая сеть, на которую работают синхронные генераторы, создает для них активно-индуктивную нагрузку (генераторы отдают как активную Р, так и реактивную Q мощности). При этом синхронные генераторы должны работать с некоторым перевозбуждением, обеспечивающим повышение перегрузочной способности. Так, например, согласно ГОСТ в синхронных генераторах при номинальном режиме ток İa должен опережать напряжение сети Ù с(т.е. отставать от напряжения Ù) и иметь cosφ = 0,8. Однако если сеть создает активно-емкостную нагрузку (например, при подключении к ней большого числа статических или вращающихся компенсаторов), то генератор для поддержания стабильного напряжения должен будет работать с недовозбуждением, т.е. потреблять реактивную мощность. Такой режим будет для него весьма неблагоприятным, так как при уменьшении тока возбуждения и заданной активной мощности Р возрастает угол θ и снижается перегрузочная способность М макс /М ном, определяющая статическую устойчивость машины.
Реактивная мощность. Для установления зависимости реактивной мощности Qот угла нагрузки θ в неявнополюсной машине рассмотрим треугольник ОАВ (см. рис. 1.34, а). Сторона этого треугольника
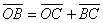
или с учетом модулей соответствующих векторов
 . (1.38)
. (1.38)
Следовательно, реактивная мощность машины
 . (1.39а)
. (1.39а)
При явнополюсной машине (см. рис. 1.34, б)
 . (1.39б)
. (1.39б)
Подставляя в (1.39б) значения токов Id и Iq из (1.34), имеем
 .
.
Заменив cos2θ и sin2θ их значениями через функции двойного угла 2θ, получим
 . (1.39в)
. (1.39в)
На рис. 1.38 показаны зависимости величин активной Р и реактивной Q мощностей от угла θ для неявнополюсной машины в пределах изменения угла – π/2 < θ < π/2.
В формуле (1.39в) и на рис. 1.38 положительному значению реактивной мощности соответствует режим, когда реактивная составляющая тока якоря отстает от вектора напряжения генератора, т.е. когда машина работает с перевозбуждением. В этом режиме по отношению к сети реактивная мощность генератора эквивалентна реактивной мощности конденсатора.
Максимальная реактивная мощность неявнополюсной машины соответствует θ = 0, т.е. имеет место при холостом ходе машины:
 . (1.40)
. (1.40)
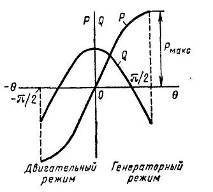
Рис. 1.38 – Зависимости мощностей Р и Q от угла нагрузки θ для неявнополюсной машины

