2015-07-14
2015-07-14 9742
97421. Устройство асинхронной машины.
Асинхронные машины используют главным образом в качестве электрических двигателей трехфазного тока. По конструкции двигатели подразделяют на два основных типа: с фазным ротором (их иногда называют двигателями с контактными кольцами) и с короткозамкнутым ротором. Эти двигатели имеют одинаковую конструкцию статора и отличаются лишь формой выполнения ротора.
Двигатели с короткозамкнутым ротором (рис. 5.1, а). На статоре расположена трехфазная обмотка (одно- или двухслойная), которая при подключении к сети трехфазного тока создает вращающееся магнитное поле. Обмотка ротора выполнена в виде "беличьей клетки". Такая обмотка является короткозамкнутой и никаких выводов не имеет (рис. 5.2, а). Беличья клетка состоит из медных или алюминиевых стержней, замкнутых накоротко с торцов двумя кольцами (рис. 5.2, а). Стержни этой обмотки вставляют в пазы сердечника ротора без какой-либо изоляции. Пазы короткозамкнутого ротора обычно выполняют полузакрытыми, а для машин малой мощности – закрытыми. Обе формы паза позволяют хорошо укрепить проводники обмотки ротора, хотя и несколько увеличивают потоки рассеяния и индуктивное сопротивление роторной обмотки. В двигателях большой мощности беличью клетку выполняют из медных стержней, концы которых вваривают в короткозамыкающие кольца (рис. 5.2, б). В двигателях малой и средней мощности беличью клетку получают путем заливки расплавленного алюминиевого сплава в пазы сердечника ротора (рис. 5.2, в). Вместе со стержнями беличьей клетки отливают короткозамыкающие кольца и торцевые лопасти, осуществляющие вентиляцию машин. Особенно пригоден для этой цели алюминий, так как он обладает малым удельным весом, легкоплавкостью и достаточно высокой электропроводностью.
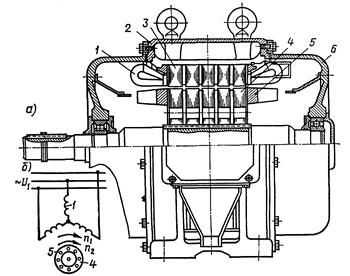
Рис. 5.1. Асинхронный двигатель с короткозамкнутым ротором (а) и схема его включения (б): 1 – обмотка статора, 2 – станина, 3 – сердечник статора,
4 – сердечник ротора, 5 – обмотка ротора (беличья клетка),
6 – подшипниковый щит.
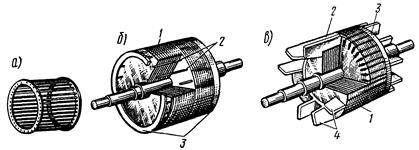
Рис. 5.2. Конструкция короткозамкнутого ротора: 1 – сердечник ротора;
2 – стержни; 3 – короткозамыкающие кольца; 4 – лопасти вентилятора.
В электрическом отношении беличья клетка представляет собой многофазную обмотку, соединенную звездой и замкнутую накоротко.
Число фаз обмотки  равно числу пазов ротора
равно числу пазов ротора  , причем в каждую фазу входят один стержень и прилегающие к нему участки короткозамыкающих колец.
, причем в каждую фазу входят один стержень и прилегающие к нему участки короткозамыкающих колец.
Двигатели с фазным ротором (рис. 5.3, а) обмотка статора выполнена таким же образом, как и в двигателях с короткозамкнутым ротором. Ротор имеет трехфазную обмотку с тем же числом полюсов. Обмотку ротора обычно соединяют звездой, три конца которой выводят к трем контактным кольцам (рис. 5.3, б), вращающимися вместе с валом машины. С помощью металлографитовых щеток, скользящих по контактным кольцам, в цепь обмотки ротора включают пусковой или пускорегулирующий реостат, т. е. в каждую фазу ротора вводят добавочное активное сопротивление.
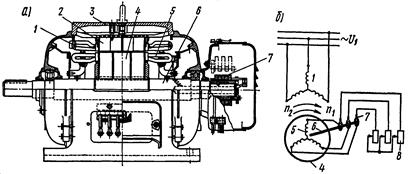
Рис. 5.3. Асинхронный двигатель с фазным ротором (а), и схема его включения (б):
1 – обмотка статора, 2 – сердечник статора, 3 – станина, 4 – сердечник ротора,
5 – обмотка ротора, 6 – вал, 7 – кольца, 8 – пусковой реостат.
Для уменьшения износа колец и щеток двигатели с фазным ротором иногда снабжают приспособлениями для подъема щеток и замыкания колец накоротко после выключения реостата. Однако так как введение этих приспособлений усложняет электродвигатель и несколько снижает надежность его работы, то более часто применяют конструкции, в которых щетки постоянно соприкасаются с контактными кольцами.
Области применения двигателей различных типов. По конструкции двигатели с короткозамкнутым ротором проще двигателей с фазным ротором и более надежны в эксплуатации (у них отсутствуют кольца и щетки, требующие систематического наблюдения, периодической замены и пр.). Основные недостатки этих двигателей – сравнительно небольшой пусковой момент и значительный пусковой ток. Поэтому их применяют в тех электрических приводах, где не требуются больше пусковые моменты (электроприводы металлообрабатывающих станков, вентиляторов и пр.). Асинхронные двигатели малой мощности и микродвигатели также выполняют с короткозамкнутым ротором.
В двигателях с фазным ротором, как будет показано далее, имеется возможность с помощью пускового реостата увеличивать пусковой момент до максимального значения и уменьшать пусковой ток. Следовательно, такие двигатели можно применять для привода и механизмов, которые пускают в ход при большой нагрузке (электроприводы грузоподъемных машин, компрессоров и пр.).
2.Принцип действия асинхронного двигателя
Электромагнитная схема асинхронной машины (рис, 5.4, а) отличается от схемы трансформатора тем, что первичная обмотка размешена на неподвижном статоре, а вторичная - на вращающемся роторе 3. Между ротором и статором имеется воздушный зазор, величину которого для улучшения магнитной связи между обмотками делают по возможности малым. Обмотка статора 2 представляет собой трехфазную (или в общем случае многофазную) обмотку, катушки которой размещены равномерно по окружности статора.
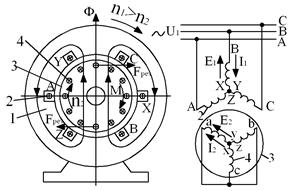
Рис. 5.4. Электромагнитная схема асинхронной машины
Фазы обмотки статора  ,
,  и
и  соединяют в звезду или треугольник и подключают к сети трехфазного тока (рис, 5.4, б). Обмотку ротора 4 в такой машине трех- или многофазной выполняют или размешают равномерно вдоль окружности ротора. Фазы ее
соединяют в звезду или треугольник и подключают к сети трехфазного тока (рис, 5.4, б). Обмотку ротора 4 в такой машине трех- или многофазной выполняют или размешают равномерно вдоль окружности ротора. Фазы ее  ,
,  и
и  в простейшем случае замыкаются накоротко.
в простейшем случае замыкаются накоротко.
При питании трехфазным током обмотки статора создаётся вращающееся магнитное поле, частота вращения которого (синхронная)  . Если ротор неподвижен или вращается с частотой, меньшей
. Если ротор неподвижен или вращается с частотой, меньшей  , то вращающееся поле индуктирует в проводниках ротора ЭДС и по ним проходит ток, который, взаимодействуя с магнитным потоком, создает электромагнитный момент. На рис 5.4. а показано направление ЭДС, индуктированной в проводниках ротора при вращении магнитного потока
, то вращающееся поле индуктирует в проводниках ротора ЭДС и по ним проходит ток, который, взаимодействуя с магнитным потоком, создает электромагнитный момент. На рис 5.4. а показано направление ЭДС, индуктированной в проводниках ротора при вращении магнитного потока  по часовой стрелке (согласно правилу правой руки). Активная составляющая тока ротора совпадает по фазе с индуктированной ЭДС; поэтому крестики и точки показывают одновременно и направление активной составлявшей тока.
по часовой стрелке (согласно правилу правой руки). Активная составляющая тока ротора совпадает по фазе с индуктированной ЭДС; поэтому крестики и точки показывают одновременно и направление активной составлявшей тока.
На проводники с током, расположенные в магнитном поле, действуют электромагнитные силы, направление которых определяется правилом правой руки. Суммарное усилие  приложенное ко всем проводникам ротора, образует электромагнитный момент
приложенное ко всем проводникам ротора, образует электромагнитный момент  , увлекающий ротор за вращающимся магнитным полем. Если этот момент достаточно велик, то ротор приходит во вращение и его установившаяся частота
, увлекающий ротор за вращающимся магнитным полем. Если этот момент достаточно велик, то ротор приходит во вращение и его установившаяся частота  вращения соответствует равенству электромагнитного момента тормозному, приложенному к валу от приводимого во вращение механизма, и внутренних сил трения.
вращения соответствует равенству электромагнитного момента тормозному, приложенному к валу от приводимого во вращение механизма, и внутренних сил трения.
Такой режим работы асинхронной машины является двигательным и, очевидно, при нем  .
.
Относительную разность частот вращения магнитного поля и ротора называют скольжением:
 . (5.1)
. (5.1)
Скольжение часто выражают в процентах:
 .
.
Очевидно, что при двигательном режиме:
 .
.
Если ротор асинхронной машины разогнать с помощью внешнего момента (например, каким-либо двигателем) до частоты, большей частоты вращения магнитного поля  то изменится направление ЭДС в проводниках ротора и активной составляющей тока ротора, т.е. асинхронная машина перейдет в генераторный режим (рис. 5.5, а). При этом изменит свое направление и магнитный момент , который станет тормозящим. В данном режиме асинхронная машина получает механическую энергию от первичного двигателя, превращает её в электрическую и отдаёт в сеть. В генераторном режиме
то изменится направление ЭДС в проводниках ротора и активной составляющей тока ротора, т.е. асинхронная машина перейдет в генераторный режим (рис. 5.5, а). При этом изменит свое направление и магнитный момент , который станет тормозящим. В данном режиме асинхронная машина получает механическую энергию от первичного двигателя, превращает её в электрическую и отдаёт в сеть. В генераторном режиме  .
.
Если изменить направление вращения ротора (или магнитного поля) так, чтобы магнитное поле и ротор вращались в противоположных направлениях (рис. 5.5, б), то ЭДС и активная составляющая тока в проводниках ротора будут направлены так же, как в двигательном режиме, т.е. машина будет получать из сети активную мощность. Однако в таком режиме электромагнитный момент направлен против вращения ротора, т.е. является тормозящим. Этот режим работы асинхронной машины называют электромагнитным торможением. В режиме электромагнитного торможения направление вращения ротора является отрицательным (по отношению к направлению магнитного поля, поэтому  , а
, а  .
.
Таким образом, характерной особенностью асинхронной машины является наличие скольжения, т.е. неравенство частот вращения и  . Только при этом условии в проводниках обмотки ротора индуктируется ЭДС и возникает электромагнитный момент. По этой причине машину называют асинхронной (её ротор вращается не синхронно с полем).
. Только при этом условии в проводниках обмотки ротора индуктируется ЭДС и возникает электромагнитный момент. По этой причине машину называют асинхронной (её ротор вращается не синхронно с полем).
а) б)
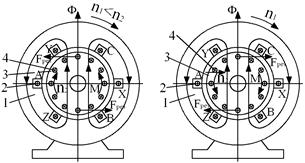
Рис. 5.5. Направление электромагнитного момента в асинхронной машине при работе её в режимах: генераторном (а), и электромагнитного торможения (б).
.
Параметры ротора зависящие от скольжения. Рассмотрим общий случай индуктирования ЭДС в обмотке ротора, увлекаемого вращающимся магнитным потоком. Так как эта обмотка пересекается магнитным потоком частотой  , частота индуктируемой в ней ЭДС:
, частота индуктируемой в ней ЭДС:
 . S (5.12a)
. S (5.12a)
При вращении ЭДС в обмотке ротора
 . (5.13)
. (5.13)
Учитывая, что эта ЭДС при заторможенном роторе
 ,
,
получаем
 . (5.13a)
. (5.13a)
Если обмотка ротора замкнута, по ней будет проходить ток  с частотой
с частотой  , который создает МДС
, который создает МДС  .
.
 . (5.14)
. (5.14)
где:  (5.15)
(5.15)
Направление вращения МДС ротора определяется порядком чередования максимумов тока в фазах, т.е. МДС ротора вращения в ту же сторону, что и магнитное поле статора.
Таким образом, в асинхронной машине магнитное поле, вращающееся с частотой  , возникает в результате совместного действия МДС ротора и статора. Оно служит связующим звеном между статором и ротором, обеспечивая обмен энергией между ними.
, возникает в результате совместного действия МДС ротора и статора. Оно служит связующим звеном между статором и ротором, обеспечивая обмен энергией между ними.
3.Потери и КПД асинхронного двигателя.
Преобразование электрической энергии в механическую в асинхронном двигателе, как и в других электрических машинах, связано с потерями энергии, поэтому полезная мощность на выходе двигателя  всегда меньше мощности на входе (потребляемой мощности)
всегда меньше мощности на входе (потребляемой мощности)  на величину потерь
на величину потерь  :
:
 . (5.16)
. (5.16)
Потери преобразуются в теплоту, что в конечном итоге ведет к нагреву машины. Потери в электрических машинах разделяются на основные и добавочные. Основные потери включают в себя магнитные, электрические и механические.
Магнитные потери  в асинхронном двигателе вызваны потерями на гистерезис и потерями на вихревые токи, происходящими в сердечнике при его перемагничивании. Величина магнитных потерь пропорциональна частоте перемагничивания
в асинхронном двигателе вызваны потерями на гистерезис и потерями на вихревые токи, происходящими в сердечнике при его перемагничивании. Величина магнитных потерь пропорциональна частоте перемагничивания  , где
, где  . Частота перемагничивания сердечника статора равна частоте тока в сети
. Частота перемагничивания сердечника статора равна частоте тока в сети  , а частота перемагничивания сердечника ротора
, а частота перемагничивания сердечника ротора  . При частоте тока в сети
. При частоте тока в сети  Гц и номинальном скольжении
Гц и номинальном скольжении  частота перемагничивания ротора
частота перемагничивания ротора  Гц, поэтому магнитные потери в сердечнике ротора настолько малы, что их в практических расчетах не учитывают.
Гц, поэтому магнитные потери в сердечнике ротора настолько малы, что их в практических расчетах не учитывают.
Электрические потери в асинхронном двигателе вызваны нагревом обмоток статора и ротора проходящими по ним токами. Величина этих потерь пропорциональна квадрату тока в обмотке (Вт):
электрические потери в обмотке статора
 ; (5.17)
; (5.17)
электрические потери в обмотке ротора
 . (5.18)
. (5.18)
Здесь  и
и  – активные сопротивления обмоток фаз статора и ротора пересчитанные на рабочую температуру
– активные сопротивления обмоток фаз статора и ротора пересчитанные на рабочую температуру  :
:
 , (5.19)
, (5.19)
где:  и
и  – активные сопротивления обмоток при температуре 9
– активные сопротивления обмоток при температуре 9  ;
;  – температурный коэффициент, для меди и алюминия
– температурный коэффициент, для меди и алюминия  .
.
Электрические потери в роторе прямо пропорциональны скольжению:
 , (5.20)
, (5.20)
где:  – электромагнитная мощность асинхронного двигателя, Вт:
– электромагнитная мощность асинхронного двигателя, Вт:
 . (5.21)
. (5.21)
Из (5.20) следует, что работа асинхронного двигателя экономичнее при малых скольжениях, так как с ростом скольжения растут электрические потери в роторе.
В асинхронных двигателях с фазным ротором помимо перечисленных электрических потерь имеют место еще и электрические потери в щеточном контакте  , где
, где  – переходное падение напряжения на пару щеток.
– переходное падение напряжения на пару щеток.
Механические потери  – это потери на трение в подшипниках и на вентиляцию. Величина этих потерь пропорциональна квадрату частоты вращения ротора
– это потери на трение в подшипниках и на вентиляцию. Величина этих потерь пропорциональна квадрату частоты вращения ротора  . В асинхронных двигателях с фазным ротором механические потери происходят еще и за счет трения между щетками и контактными кольцами ротора.
. В асинхронных двигателях с фазным ротором механические потери происходят еще и за счет трения между щетками и контактными кольцами ротора.
Добавочные потери включают в себя все виды трудноучитываемых потерь, вызванных действием высших гармоник МДС, пульсацией магнитной индукции в зубцах и другими причинами. В соответствии с ГОСТом добавочные потери асинхронных двигателей принимают равными 0,5% от подводимой к двигателю мощности :
 . (5.22)
. (5.22)
При расчете добавочных потерь для неноминального режима следует пользоваться выражением
 . (5.23)
. (5.23)
где:  – коэффициент нагрузки.
– коэффициент нагрузки.
Сумма всех потерь асинхронного двигателя (Вт)
 . (5.24)
. (5.24)
На рис. 5.8. представлена энергетическая диаграмма асинхронного двигателя, из которой видно, что часть подводимой к двигателю мощности  затрачивается в статоре на магнитные и электрические
затрачивается в статоре на магнитные и электрические  потери. Оставшаяся после этого электромагнитная мощность . передается на ротор где частично расходуется на электрические потери
потери. Оставшаяся после этого электромагнитная мощность . передается на ротор где частично расходуется на электрические потери  и преобразуется в полную механическую мощность
и преобразуется в полную механическую мощность  . Часть мощности идет на покрытие механических и добавочных потерь
. Часть мощности идет на покрытие механических и добавочных потерь  , а оставшаяся часть этой мощности составляет полезную мощность двигателя.
, а оставшаяся часть этой мощности составляет полезную мощность двигателя.
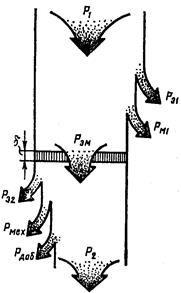
Рис. 5.8. Энергетическая диаграмма асинхронного двигателя
У асинхронного двигателя КПД
 . (5.25)
. (5.25)
Электрические потери в обмотках и являются переменными потерями, так как их величина зависит от нагрузки двигателя, т. е. от значений токов в обмотках статора и ротора. Переменными являются также и добавочные потери. Что же касается магнитных и механических , то они практически не зависят от нагрузки (исключение составляют двигатели, у которых с изменением нагрузки в широком диапазоне меняется частота вращения).
Коэффициент полезного действия асинхронного двигателя с изменениями нагрузки также меняет свою величину: в режиме холостого хода КПД равен нулю, а затем с ростом нагрузки он увеличивается, достигая максимума при нагрузке  . При дальнейшем увеличении нагрузки КПД незначительно снижается, а при перегрузке
. При дальнейшем увеличении нагрузки КПД незначительно снижается, а при перегрузке  он резко убывает, что объясняется интенсивным ростом переменных потерь
он резко убывает, что объясняется интенсивным ростом переменных потерь  , величина которых пропорциональна квадрату тока статора, и уменьшением коэффициента мощности. График зависимости КПД от нагрузки
, величина которых пропорциональна квадрату тока статора, и уменьшением коэффициента мощности. График зависимости КПД от нагрузки  Для асинхронных двигателей имеет вид, рис. 5.9.
Для асинхронных двигателей имеет вид, рис. 5.9.
КПД трехфазных асинхронных двигателей общего назначения при номинальной нагрузке составляет: для двигателей мощностью от 1 до 10 кВт  , для двигателей мощностью более 10 кВт
, для двигателей мощностью более 10 кВт  .
.
Коэффициент полезного действия является одним из основных параметров асинхронного двигателя, определяющим его энергетические свойства – экономичность в процессе эксплуатации. Кроме того, КПД двигателя, а точнее величина потерь в нем, регламентирует температуру нагрева его основных частей и в первую очередь его обмотки статора. По этой причине двигатели с низким КПД (при одинаковых условиях охлаждения) работают при более высокой температуре нагрева обмотки статора, что ведет к снижению их надежности и долговечности.
4.Рабочие характеристики асинхронного двигателя
Рабочие характеристики асинхронного двигателя представляют собой графически выраженные зависимости частоты вращения , КПД  , полезного момента (момента на валу)
, полезного момента (момента на валу)  , коэффициента мощности
, коэффициента мощности  и тока статора
и тока статора  от полезной мощности
от полезной мощности  при
при  и
и  .
.
Скоростная характеристика  . Частота вращения ротора асинхронного двигателя
. Частота вращения ротора асинхронного двигателя
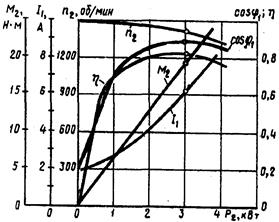
Рис. 5.9. Рабочие характеристики асинхронного двигателя

Скольжение  , а следовательно, и его частота вращения определяются отношением электрических потерь в роторе к электромагнитной мощности . Пренебрегая электрическими потерями в роторе в режиме холостого хода, можно принять
, а следовательно, и его частота вращения определяются отношением электрических потерь в роторе к электромагнитной мощности . Пренебрегая электрическими потерями в роторе в режиме холостого хода, можно принять  , а поэтому
, а поэтому  и
и  . По мере увеличения нагрузки на валу двигателя отношение растет, достигая значений 0,01-0,08 при номинальной нагрузке. В соответствии с этим зависимость представляет собой кривую, слабо наклоненную к оси абсцисс. Однако при увеличении активного сопротивления ротора
. По мере увеличения нагрузки на валу двигателя отношение растет, достигая значений 0,01-0,08 при номинальной нагрузке. В соответствии с этим зависимость представляет собой кривую, слабо наклоненную к оси абсцисс. Однако при увеличении активного сопротивления ротора  угол наклона этой кривой увеличивается. В этом случае изменения частоты вращения при колебаниях нагрузки возрастают. Объясняется это тем, что с увеличением возрастают электрические потери в роторе.
угол наклона этой кривой увеличивается. В этом случае изменения частоты вращения при колебаниях нагрузки возрастают. Объясняется это тем, что с увеличением возрастают электрические потери в роторе.
Зависимость  . Зависимость полезного момента на валу двигателя от полезной мощности Р2 определяется выражением
. Зависимость полезного момента на валу двигателя от полезной мощности Р2 определяется выражением
 , (5.26)
, (5.26)
где: – полезная мощность, Вт;  – угловая частота вращения ротора.
– угловая частота вращения ротора.
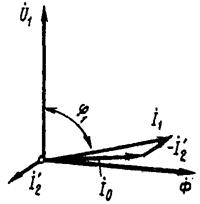
Рис. 5.10. Векторная диаграмма асинхронного двигателя при большой нагрузке
Из этого выражения следует, что если  , то график
, то график  представляет собой прямую линию. Но в асинхронном двигателе с увеличением нагрузки частота вращения ротора уменьшается, а поэтому полезный момент на валу с увеличением нагрузки возрастает несколько быстрее нагрузки, а следовательно, график имеет криволинейный вид.
представляет собой прямую линию. Но в асинхронном двигателе с увеличением нагрузки частота вращения ротора уменьшается, а поэтому полезный момент на валу с увеличением нагрузки возрастает несколько быстрее нагрузки, а следовательно, график имеет криволинейный вид.
Зависимость  . В связи с тем что ток статора имеет реактивную (индуктивную) составляющую, необходимую для создания магнитного поля в статоре, коэффициент мощности асинхронных двигателей меньше единицы. Наименьшее значение коэффициента мощности соответствует режиму х.х. Объясняется это тем, что ток х.х.
. В связи с тем что ток статора имеет реактивную (индуктивную) составляющую, необходимую для создания магнитного поля в статоре, коэффициент мощности асинхронных двигателей меньше единицы. Наименьшее значение коэффициента мощности соответствует режиму х.х. Объясняется это тем, что ток х.х.  при любой нагрузке остается практически неизменным. Поэтому при малых нагрузках двигателя ток статора невелик и в значительной части является реактивным
при любой нагрузке остается практически неизменным. Поэтому при малых нагрузках двигателя ток статора невелик и в значительной части является реактивным  . В результате сдвиг по фазе тока статора
. В результате сдвиг по фазе тока статора  относительно напряжения
относительно напряжения  получается значительным
получается значительным  , лишь немногим меньше 90° (рис. 63). Коэффициент мощности асинхронных двигателей в режиме х.х. обычно не превышает 0,2.
, лишь немногим меньше 90° (рис. 63). Коэффициент мощности асинхронных двигателей в режиме х.х. обычно не превышает 0,2.
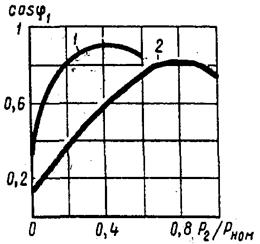
Рис. 5.11. Зависимость , от нагрузки при соединении обмотки статора
звездой (1) и треугольником (2)
При увеличении нагрузки на валу двигателя растет активная составляющая тока и коэффициент мощности возрастает, достигая наибольшего значения (0,80—0,90) при нагрузке, близкой к номинальной. Дальнейшее увеличение нагрузки сопровождается уменьшением , что объясняется возрастанием индуктивного сопротивления ротора  за счет увеличения скольжения, а следовательно, и частоты тока в роторе. В целях повышения коэффициента мощности асинхронных двигателей чрезвычайно важно, чтобы двигатель работал всегда или по крайней мере значительную часть времени с нагрузкой, близкой к номинальной. Это можно обеспечить лишь при правильном выборе мощности двигателя. Если же двигатель работает значительную часть времени недогруженным, то для повышения целесообразно подводимое к двигателю напряжение
за счет увеличения скольжения, а следовательно, и частоты тока в роторе. В целях повышения коэффициента мощности асинхронных двигателей чрезвычайно важно, чтобы двигатель работал всегда или по крайней мере значительную часть времени с нагрузкой, близкой к номинальной. Это можно обеспечить лишь при правильном выборе мощности двигателя. Если же двигатель работает значительную часть времени недогруженным, то для повышения целесообразно подводимое к двигателю напряжение  уменьшить. Например, в двигателях, работающих при соединении обмотки статора треугольником, это можно сделать пересоединив обмотки статора в звезду, что вызовет уменьшение фазного напряжения в
уменьшить. Например, в двигателях, работающих при соединении обмотки статора треугольником, это можно сделать пересоединив обмотки статора в звезду, что вызовет уменьшение фазного напряжения в  раз. При этом магнитный поток статора, а следовательно, и намагничивающий ток уменьшаются примерное раз. Кроме того, активная составляющая тока статора несколько увеличивается. Все это способствует повышению коэффициента мощности двигателя. На рис. 5.11. представлены графики зависимости асинхронного двигателя от нагрузки при соединении обмоток статора звездой (кривая 1) и треугольником (кривая 2).
раз. При этом магнитный поток статора, а следовательно, и намагничивающий ток уменьшаются примерное раз. Кроме того, активная составляющая тока статора несколько увеличивается. Все это способствует повышению коэффициента мощности двигателя. На рис. 5.11. представлены графики зависимости асинхронного двигателя от нагрузки при соединении обмоток статора звездой (кривая 1) и треугольником (кривая 2).
5.Электромагнитный момент и механическая характеристика асинхронного двигателя
Электромагнитный момент асинхронного двигателя создается взаимодействием тока в обмотке ротора с вращающимся магнитным полем. Электромагнитный момент М пропорционален электромагнитной мощности:
 , (6.1)
, (6.1)
где:
 . (6.2)
. (6.2)
– угловая синхронная скорость вращения.
Подставив в (6.1) значение электромагнитной мощности по (5.20 и5.18), получим
 , (6.3)
, (6.3)
т. е. электромагнитный момент асинхронного двигателя пропорционален мощности электрических потерь в обмотке ротора.
Если значение тока ротора для Г-образной схемы замещения подставить в (6.3), то получим формулу электромагнитного момента асинхронной машины  :
:
 . (6.4)
. (6.4)
Параметры схемы замещения асинхронной машины , ,  и
и  , входящие в выражение (6.4), являются постоянными, так как их значения при изменениях нагрузки машины остается практически неизменными. Также постоянными можно считать напряжение на обмотке фазы статора и частоту
, входящие в выражение (6.4), являются постоянными, так как их значения при изменениях нагрузки машины остается практически неизменными. Также постоянными можно считать напряжение на обмотке фазы статора и частоту  . В выражении момента единственная переменная величина – скольжение
. В выражении момента единственная переменная величина – скольжение  , которое для различных режимов работы асинхронной машины может принимать разные значения в диапазоне от
, которое для различных режимов работы асинхронной машины может принимать разные значения в диапазоне от  до
до  .
.
Рассмотрим зависимость момента от скольжения  при , и постоянных параметрах схемы замещения. Эту зависимость принято называть механической характеристикой асинхронной машины. Анализ выражения (6.4), представляющего собой аналитическое выражение механической характеристики , показывает, что при значениях скольжения
при , и постоянных параметрах схемы замещения. Эту зависимость принято называть механической характеристикой асинхронной машины. Анализ выражения (6.4), представляющего собой аналитическое выражение механической характеристики , показывает, что при значениях скольжения  и
и  электромагнитный момент
электромагнитный момент  . Из этого следует, что механическая характеристика имеет максимум.
. Из этого следует, что механическая характеристика имеет максимум.
Для определения величины критического скольжения  , соответствующего максимальному моменту, необходимо взять первую производную от (6.4) и приравнять ее нулю:
, соответствующего максимальному моменту, необходимо взять первую производную от (6.4) и приравнять ее нулю:  . В результате
. В результате
 . (6.5)
. (6.5)
Подставив значение критического скольжения (по 6.5) в выражение электромагнитного момента, после ряда преобразований получим выражение максимального момента :
 . (6.6)
. (6.6)
В (6.5) и (6.6) знак плюс соответствует двигательному, а знак минус – генераторному режиму работы асинхронной машины.
Для асинхронных машин общего назначения активное сопротивление обмотки статора намного меньше суммы индуктивных сопротивлений:  . Поэтому, пренебрегая величиной , получим упрощенные выражения критического скольжения
. Поэтому, пренебрегая величиной , получим упрощенные выражения критического скольжения
 , (6.7)
, (6.7)
и максимального момента
 . (6.8)
. (6.8)
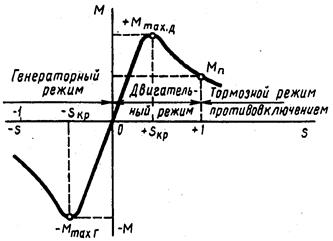
Рис. 6.1. Зависимость режимов работы асинхронной машины от скольжения
Анализ выражения (6.6) показывает, что максимальный момент асинхронной машины в генераторном режиме больше, чем в двигательном  . На рис. 6.1 показана механическая асинхронной машины при . На этой характеристике указаны зоны, соответствующие различным режимам работы: двигательный режим
. На рис. 6.1 показана механическая асинхронной машины при . На этой характеристике указаны зоны, соответствующие различным режимам работы: двигательный режим  , когда электромагнитный момент является вращающим; генераторный режим
, когда электромагнитный момент является вращающим; генераторный режим  и тормозной режим противовключением
и тормозной режим противовключением  , когда электромагнитный момент М является тормозящим.
, когда электромагнитный момент М является тормозящим.
Из (6.4) следует, что электромагнитный момент асинхронного двигателя пропорционален квадрату напряжения сети:  .
.
Это в значительной степени отражается на эксплуатационных свойствах двигателя: даже небольшое снижение напряжения сети вызывает заметное уменьшение вращающего момента асинхронного двигателя. Например, при уменьшении напряжения сети на 10% относительно номинального  электромагнитный момент двигателя уменьшается на 19%:
электромагнитный момент двигателя уменьшается на 19%:  , где – момент при номинальном напряжении сети, а
, где – момент при номинальном напряжении сети, а  – момент при пониженном напряжении.
– момент при пониженном напряжении.
Для анализа работы асинхронного двигателя удобнее воспользоваться механической характеристикой , представленной на рис. 6.2. При включении двигателя в сеть магнитное поле статора, не обладая инерцией, сразу же начинает вращение с синхронной частотой , в то же время ротор двигателя под влиянием сил инерции в начальный момент пуска остается неподвижным  и скольжение
и скольжение  .
.
. (6.9)
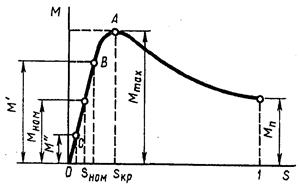
Рис. 6.2. Зависимость электромагнитного момента асинхронного двигателя от скольжения
Под действием этого момента начинается вращение ротора двигателя, при этом скольжение уменьшается, а вращающий момент возрастает в соответствии с характеристикой . При критическом скольжении момент достигает максимального значения  . С дальнейшим нарастанием частоты вращения (уменьшением скольжения) момент начинает убывать, пока не достигнет установившегося значения, равного сумме противодействующих моментов, приложенных к ротору двигателя: момента х.х.
. С дальнейшим нарастанием частоты вращения (уменьшением скольжения) момент начинает убывать, пока не достигнет установившегося значения, равного сумме противодействующих моментов, приложенных к ротору двигателя: момента х.х.  и полезного нагрузочного момента (момента на валу двигателя) , т. е.
и полезного нагрузочного момента (момента на валу двигателя) , т. е.
 . (6.10)
. (6.10)
Статический момент  равен сумме противодействующих моментов при равномерном вращении ротора
равен сумме противодействующих моментов при равномерном вращении ротора  . Допустим, что противодействующий момент на валу двигателя соответствует номинальной нагрузке двигателя. В этом случае установившийся режим работы двигателя определится точкой на механической характеристике с координатами
. Допустим, что противодействующий момент на валу двигателя соответствует номинальной нагрузке двигателя. В этом случае установившийся режим работы двигателя определится точкой на механической характеристике с координатами  и
и  ,
,
где:  и
и  – номинальные значения электромагнитного момента и скольжения.
– номинальные значения электромагнитного момента и скольжения.
Из анализа механической характеристики также следует, что устойчивая работа асинхронного двигателя возможна при скольжениях меньше критического  , т. е. на участке
, т. е. на участке  механической характеристики. Делов том, что именно на этом участке изменение нагрузки на валу двигателя сопровождается соответствующим изменением электромагнитного момента. Так, если двигатель работал в номинальном режиме
механической характеристики. Делов том, что именно на этом участке изменение нагрузки на валу двигателя сопровождается соответствующим изменением электромагнитного момента. Так, если двигатель работал в номинальном режиме  , то имело место равенство моментов:
, то имело место равенство моментов:  . Если произошло увеличение нагрузочного момента до значения
. Если произошло увеличение нагрузочного момента до значения  , то равенство моментов нарушится, т. е.
, то равенство моментов нарушится, т. е.  , и частота вращения ротора начнет убывать (скольжение будет увеличиваться). Это приведет к росту электромагнитного момента до значения
, и частота вращения ротора начнет убывать (скольжение будет увеличиваться). Это приведет к росту электромагнитного момента до значения  (точка
(точка  ), после чего режим работы двигателя вновь станет установившимся. Если же при работе двигателя в номинальном режиме произойдет уменьшение нагрузочного момента до значения
), после чего режим работы двигателя вновь станет установившимся. Если же при работе двигателя в номинальном режиме произойдет уменьшение нагрузочного момента до значения  , то равенство моментов вновь нарушится, но теперь вращающий момент окажется больше суммы противодействующих:
, то равенство моментов вновь нарушится, но теперь вращающий момент окажется больше суммы противодействующих:  . Частота вращения ротора начнет возрастать (скольжение будет уменьшаться), и это приведет к уменьшению электромагнитного момента до значения
. Частота вращения ротора начнет возрастать (скольжение будет уменьшаться), и это приведет к уменьшению электромагнитного момента до значения  (точка
(точка  ); устойчивый режим работы будет вновь восстановлен, но уже при других значениях и .
); устойчивый режим работы будет вновь восстановлен, но уже при других значениях и .
Работа асинхронного двигателя становится неустойчивой при скольжениях  . Так, если электромагнитный момент двигателя
. Так, если электромагнитный момент двигателя  , а скольжение
, а скольжение  , то даже незначительное увеличение нагрузочного момента , вызвав увеличение скольжения , приведет к уменьшению электромагнитного момента . За этим последует дальнейшее увеличение скольжения и т. д., пока скольжение не достигнет значения , т. е. пока ротор двигателя не остановится.
, то даже незначительное увеличение нагрузочного момента , вызвав увеличение скольжения , приведет к уменьшению электромагнитного момента . За этим последует дальнейшее увеличение скольжения и т. д., пока скольжение не достигнет значения , т. е. пока ротор двигателя не остановится.
Таким образом, при достижении электромагнитным моментом максимального значения наступает предел устойчивой работы асинхронного двигателя. Следовательно, для устойчивой работы двигателя необходимо, чтобы сумма нагрузочных моментов, действующих на ротор, была меньше максимального момента:  . Но чтобы работа асинхронного двигателя была надежной и чтобы случайные кратковременные перегрузки не вызывали остановок двигателя, необходимо, чтобы он обладал перегрузочной способностью. Перегрузочная способность двигателя
. Но чтобы работа асинхронного двигателя была надежной и чтобы случайные кратковременные перегрузки не вызывали остановок двигателя, необходимо, чтобы он обладал перегрузочной способностью. Перегрузочная способность двигателя  определяется отношением максимального момента к номинальному . Для асинхронных двигателей общего назначения перегрузочная способность составляет
определяется отношением максимального момента к номинальному . Для асинхронных двигателей общего назначения перегрузочная способность составляет  .
.
Следует также обратить внимание на то, что работа двигателя при скольжении  , т. е. на рабочем участке механической характеристики, является наиболее экономичной, так как она соответствует малым значениям скольжения, а следовательно, и меньшим значениям электрических потерь в обмотке ротора
, т. е. на рабочем участке механической характеристики, является наиболее экономичной, так как она соответствует малым значениям скольжения, а следовательно, и меньшим значениям электрических потерь в обмотке ротора  .
.
Применение формулы (6.4) для расчета механических характеристик асинхронных двигателей не всегда возможно, так как параметры схемы замещения двигателей обычно не приводятся в каталогах и справочниках, поэтому для практических расчетов обычно пользуются упрощенной формулой момента. В основу этой формулы положено допущение, что активное сопротивление обмотки статора асинхронного двигателя  , при этом
, при этом
 . (6.11)
. (6.11)
Критическое скольжение определяют по формуле
 . (6.12)
. (6.12)
Расчет механической характеристики намного упрощается, если его вести в относительных единицах  . В этом случае уравнение механической характеристики имеет вид
. В этом случае уравнение механической характеристики имеет вид
 . (6.13)
. (6.13)
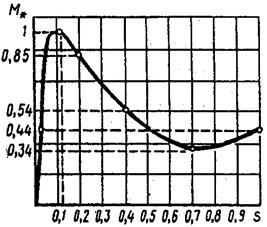
Рис. 6.3, Механическая характеристика асинхронного двигателя типа 4А160М4УЗ
Применение упрощенной формулы (6.13) наиболее целесообразно при расчете рабочего участка механической характеристики при скольжениях , так как в этом случае величина ошибки не превышает значений, допустимых для технических расчетов. При скольжениях  ошибка может достигать 15-17%.
ошибка может достигать 15-17%.
6.Способы пуска и регулирование скорости АД.
6.1.Пуск асинхронных двигателей.
При пуске двигателя в ход по возможности должны удовлетворяться следующие основные требования: процесс пуска должен быть простым и осуществляться без сложных пусковых устройств; пусковой момент должен быть достаточно большим, а пусковые токи – по возможности малыми, иногда к этим требованиям добавляются и другие, обусловленные особенностями конкретных приводов, в которых используются двигатели: необходимость плавного пуска, максимального пускового момента и пр.
Практически используют следующие способы пуска: непосредственное подключение обмотки статора к сети (прямой пуск); понижение напряжения, подводимого к обмотке статора при пуске; подключение к обмотке ротора пускового реостата.
Прямой пуск. Применяют для пуска асинхронных двигателей с короткозамкнутым ротором. Двигатели этого типа малой и средней мощности обычно проектируют так, чтобы при непосредственном подключении обмотки статора к сети возникающие пусковые токи не создавали чрезмерных электродинамических усилий и превышений температуры, опасных с точки зрения механической и термической прочности основных элементов машины.
Двигатели обычно пускаются с помощью электромагнитного выключателя  (магнитного пускателя) по схеме, изображенной на рис. 70 а, и разгоняются по естественной механической характеристике (рис. 70, б) от точки соответствующей начальному моменту пуска, до точки
(магнитного пускателя) по схеме, изображенной на рис. 70 а, и разгоняются по естественной механической характеристике (рис. 70, б) от точки соответствующей начальному моменту пуска, до точки  , соответствующей условию
, соответствующей условию  – Ускорение при разгоне при любой частоте определяется разностью абсцисс кривых и . Если в начальный
– Ускорение при разгоне при любой частоте определяется разностью абсцисс кривых и . Если в начальный  , то двигатель разогнаться не сможет.
, то двигатель разогнаться не сможет.
Величину начального пускового момента можно получить из формулы (45), положив в ней  :
:
 . (55)
. (55)
Отношение моментов
 , (56)
, (56)
называют кратностью начального пускового момента. Для двигателей с короткозамкнутым ротором мощностью 0,6-100 кВт ГОСТом установлено  ; мощностью 100-1000 кВт –
; мощностью 100-1000 кВт –  .
.
а) б)
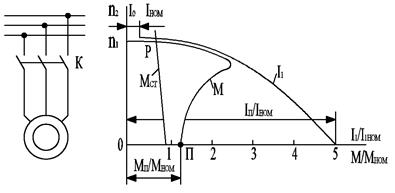
Рис. 70. Схема включения асинхронного двигателя при прямом пуске и графики изменения момента двигателя, статического момента и тока
Кроме сравнительно небольшого пускового момента недостатком данного способа пуска является также большой бросок пускового тока, в пять-семь раз превышающий номинальное значение тока.
Несмотря на указанные недостатки, пуск двигателя путем непосредственного подключения обмотки статора к сети весьма широко применяется благодаря простоте операций пуска и хорошим технико-экономическим свойствам двигателя с короткозамкнутым ротором: низкой стоимости и высоким энергетическим показателям (КПД,  и др.).
и др.).
Пуск при пониженном напряжении. Такой пуск применяется для асинхронных двигателей с короткозамкнутым ротором большой мощности, а также для двигателей средней мощности при недостаточно мощных электрических сетях. Понижение напряжения может осуществляться следующими способами:
1. Переключением обмотки статора при пуске с рабочей схемы «треугольник» на пусковую схему «звезда». Это можно осуществить с помощью трехполюсного переключателя  (рис. 71, а) или контактора. При включении обмотки статора по схеме «звезда» напряжение, подаваемое на фазы этой обмотки, уменьшается в раз, что обуславливает уменьшение фазных токов в раз и линейных токов в три раза. По окончании процесса пуска и разгона двигателя до номинальной частоты вращения обмотку статора переключают обратно на схему «треугольник»;
(рис. 71, а) или контактора. При включении обмотки статора по схеме «звезда» напряжение, подаваемое на фазы этой обмотки, уменьшается в раз, что обуславливает уменьшение фазных токов в раз и линейных токов в три раза. По окончании процесса пуска и разгона двигателя до номинальной частоты вращения обмотку статора переключают обратно на схему «треугольник»;
2. Включением в цепь обмотки статора на период пуска добавочных активных (резисторов) или реактивных (реакторов) сопротивлений (рис. 71, б). При этом на указанных сопротивлениях создаются некоторые падения напряжения  пропорциональные пусковому току, вследствие чего к обмотке статора будет приложено пониженное напряжение. По мере разгона двигателя снижается ЭДС,
пропорциональные пусковому току, вследствие чего к обмотке статора будет приложено пониженное напряжение. По мере разгона двигателя снижается ЭДС,  , индуктированная в обмотке ротора, а следовательно, и пусковой ток. В результате этого уменьшается падение напряжения на указанных сопротивлениях и возрастает приложенное к двигателю напряжение. Таким образом, при рассматриваем способе пуска напряжение, приложенное к двигателю, автоматически растет по мере разгона ротора. После окончания разгона добавочные резисторы или реакторы замыкаются накоротко контактором
, индуктированная в обмотке ротора, а следовательно, и пусковой ток. В результате этого уменьшается падение напряжения на указанных сопротивлениях и возрастает приложенное к двигателю напряжение. Таким образом, при рассматриваем способе пуска напряжение, приложенное к двигателю, автоматически растет по мере разгона ротора. После окончания разгона добавочные резисторы или реакторы замыкаются накоротко контактором  ;
;
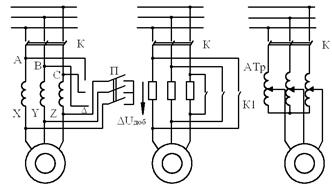
Рис. 71. Схемы включения асинхронного двигателя при пуске с понижением напряжения
3. Подключением двигателя к сети через понижающий автотрансформатор  (рис. 71, в). Последний может иметь несколько ступеней, которые в процессе пуска двигателя переключаются соответствующей аппаратурой.
(рис. 71, в). Последний может иметь несколько ступеней, которые в процессе пуска двигателя переключаются соответствующей аппаратурой.
Недостатком указанных способов является значительное уменьшение пускового и максимального моментов двигателя, которые пропорциональны квадрату приложенного напряжения. Поэтому их можно использовать только при пуске двигателей без нагрузки.
Пуск с помощью реостата в цепи ротора. Рассматриваемый способ применяют для пуска двигателей с фазным ротором. Пусковой реостат обычно имеет три-шесть ступеней (рис. 72, а), что позволяет в процессе пуска постепенно уменьшать пусковое сопротивление, подчеркивая высокое значение пускового момента в период разгона двигателя.
Вначале двигатель пускается по характеристике 4 (рис. 72, б), соответствующей сопротивлению пускового реостата  и развивает вращающий момент
и развивает вращающий момент  . По мере увеличения частоты вращения вращающий момент уменьшается и может стать меньше некоторого момента
. По мере увеличения частоты вращения вращающий момент уменьшается и может стать меньше некоторого момента  .
.
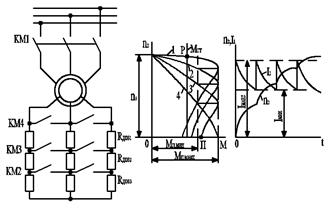
Рис. 72. Схема включения асинхронного двигателя при реостатном пуске (а), его пусковая диаграмма (б), графики изменения частоты вращения и тока при пуске (в)
Поэтому при  часть
часть  сопротивления пускового реостата выводят, замыкая контактор . Вращающий момент при этом мгновенно возрастает до а затем с увеличением частоты вращения изменяется по характеристике 3, соответствующей сопротивлению реостата
сопротивления пускового реостата выводят, замыкая контактор . Вращающий момент при этом мгновенно возрастает до а затем с увеличением частоты вращения изменяется по характеристике 3, соответствующей сопротивлению реостата  . При дальнейшем уменьшении момента до часть
. При дальнейшем уменьшении момента до часть  сопротивления реостата снова выключается контактором
сопротивления реостата снова выключается контактором  , и двигатель переходит на работу по характеристике 2, соответствующей сопротивлению
, и двигатель переходит на работу по характеристике 2, соответствующей сопротивлению  . Таким образом, при постепенном (ступенчатом) уменьшении сопротивления пускового реостата вращающий момент двигателя изменяется от до частота вращения возрастает до ломанной кривой, показанной на рис. 72 б жирной кривой. В конце пуска пусковой реостат полностью выводится контактором , обмотка ротора замыкается накоротко, двигатель переходит на работу по естественной характеристике 1, при этом разгон осуществляется до точки Р. Выключение отдельных ступеней пускового реостата в процессе разгона двигателя может осуществляться вручную или автоматически. Таким образом, включение реостата в цепь ротора можно осуществить пуск двигателя при
. Таким образом, при постепенном (ступенчатом) уменьшении сопротивления пускового реостата вращающий момент двигателя изменяется от до частота вращения возрастает до ломанной кривой, показанной на рис. 72 б жирной кривой. В конце пуска пусковой реостат полностью выводится контактором , обмотка ротора замыкается накоротко, двигатель переходит на работу по естественной характеристике 1, при этом разгон осуществляется до точки Р. Выключение отдельных ступеней пускового реостата в процессе разгона двигателя может осуществляться вручную или автоматически. Таким образом, включение реостата в цепь ротора можно осуществить пуск двигателя при  и резко уменьшить пусковой ток.
и резко уменьшить пусковой ток.
На рис. 72 в показан характер изменения тока  и частоты вращения , при пуске двигателя указанным способом. Ток также изменяется по ломанной кривой между двумя крайними значениями
и частоты вращения , при пуске двигателя указанным способом. Ток также изменяется по ломанной кривой между двумя крайними значениями  и
и  .
.
Недостатком рассмотренного способа является относительная сложность пуска и необходимость применения более сложных и дорогих двигателей с фазным ротором. Кроме того, эти двигатели имеют несколько худшие показатели рабочих характеристик, чем двигатели с короткозамкнутым ротором такой же мощности (кривые , проходят ниже). В связи с этим двигатели с фазным ротором применяют только при тяжелых условиях пуска (когда необходимо развивать максимально возможный пусковой момент), при малой мощности электрической сети или необходимости плавного регулирования частоты вращения.
6.2.Регулирование частоты вращения асинхронных двигателей
Частота вращения асинхронного двигателя определяется формулой
 , (57)
, (57)
 . (57а)
. (57а)
из которой следует три принципиально возможных метода регулирования скорости асинхронных двигателей: изменением частоты питающего напряжения, числа пар полюсов  и величины скольжения .
и величины скольжения .
Частотное регулирование. Этот способ регулирования скорости позволяет применять наиболее надежные и дешевые асинхронные двигателя с короткозамкнутым ротором. Однако для изменения частоты питающего напряжения требуется наличие источника электрического тока переменной частоты. В качестве последнего можно использовать: синхронный генератор с переменной частотой вращения; преобразователи частоты: электромашинные или статические, выполненные на полупроводниковых тиристорах или силовых транзисторах.
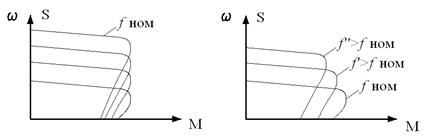
При частотном регулировании скорости можно регулировать вниз от  (номинальной скорости) и вверх от номинальной. При регулировании скорости вниз от номинальной с изменением частоты изменяют подводимое напряжение ; при этом магнитный поток остаётся неизменным. Графики механических характеристик представлены на рис, 73.
(номинальной скорости) и вверх от номинальной. При регулировании скорости вниз от номинальной с изменением частоты изменяют подводимое напряжение ; при этом магнитный поток остаётся неизменным. Графики механических характеристик представлены на рис, 73.