 2015-09-06
2015-09-06 558
558Самонаведением называется такой способ радиоуправления, при котором на борту УО измеряются параметры движения цели и формируются команды управления.
В зависимости от места расположения первичного источника электромагнитного излучения различают активные, полуактивные, пассивные и комбинированные системы самонаведения.
Структура контура наведения не зависит от типа системы и определяется методом наведения. Для самонаведения характерны следующие методы наведения:
- прямое наведение;
- метод погони;
метод пропорционального наведения (пропорциональной навигации);
метод параллельного сближения.
В методе прямого наведения выполняется требование о совмещении линии визирования с продольной осью УО, т.е. информационным признаком является угол e между линией визирования цели и продольной осью УО(рис.3.1а). Угол линии визирования h вырабатывается кинематическим звеном, а угол продольной оси j берется из модели УО-АП.
В методе погони информационным признаком является рассогласование между линией визирования и вектором скорости УО. Угол вектора скорости отличается от угла продольной оси на угол скольжения (атаки) a. Определение угла вектора скорости напрямую невозможно, поэтому команда управления вырабатывается путем добавления к углу e между осью антенны и продольной осью УО, определяемому пеленгатором, угла скольжения a, определяемого флюгерным датчиком. Поэтому в звено выработки команд добавлен сумматор и преобразователь угол-напряжение с коэффициентом передачи, равным Кm.
Измерительным звеном является радиопеленгатор, который может быть неподвижным (совмещенным с продольной осью ракеты), либо подвижным (следящим), стремящимся совместить ось антенны с линией визирования. Будем рассматривать систему со следящим пеленгатором. В данном случае информационным признаком будет угол e между продольной осью ракеты и осью антенны, формируемый датчиком угла (ДУ), преобразующим угол рассогласования в напряжение Uк. В состав пеленгатора входит силовой привод (СП), обладающий инерционностью, в результате чего при определении угла e будет наблюдаться динамическая ошибка De. Модель пеленгатора может быть представлена моделью рис.3.2 б.
 | |||
| |||
Модель звена УО-АП аналогична модели, исследуемой в работе 1.
Модель кинематического звена составим из геометрических соотношений рис.3.2.
Будем рассматривать движение УО и цели в стартовой системе координат. Будем считать, что УО и цель движутся равномерно со скоростями Vр и Vц с курсовыми углами gр и gц соответственно. Спроецируем скорости УО и цели на линию визирования и нормаль к ней. Проекция скоростей на линию визирования дает относительную скорость движения, которая может быть представлена как производная вектора дальности r. Поскольку УО и цель непрерывно сближаются, величина  будет всегда отрицательной. Тогда будет иметь место соотношение
будет всегда отрицательной. Тогда будет иметь место соотношение
 (3.1)
(3.1)
Проекция скоростей на нормаль к линии визирования позволяет записать уравнение для угловой скорости  . С учетом проекций, получим
. С учетом проекций, получим
 . (3.2)
. (3.2)
Соотношения (3.1), (3.2) составляют систему уравнений, описывающих кинематическое звено. Схема, реализующая ее решение, входит в состав схемы моделирования рис.3.3.
Модель звена выработки команд зависит от метода наведения. Для метода прямого наведения это может быть безынерционное звено с коэффициентом передачи Кт. Контур управления для метода погони аналогичен контуру управления для прямого наведения и отличается только наличием блока Кm. Для унификации модели переход от метода погони к прямому наведению может осуществляться путем задания Кm = 0.

Метод прямого наведения характерен тем, что при приближении УО к цели резко возрастает угол атаки, а следовательно, перегрузка УО. Теоретически возрастание потребной перегрузки возможно до бесконечности. Это приводит к сходу УО с кинематической траектории и образованию большого промаха, т.е. метод может работать до определенного расстояния до цели, определяемого скоростью сближения. Данный метод применим только при малых скоростях УО и цели.
Метод погони также обладает свойством возрастания перегрузки при приближении к цели, зависящей от ракурса стрельбы. Так, прямое попадание ракеты возможно только при движении ракеты точно навстречу или точно в хвост цели. Причем, траектория, располагающаяся в передней полусфере (при q=p), является неустойчивой, т.е. при небольшом отклонении ракеты от нее угол q начнет монотонно изменяться, пока не примет значения, равного нулю.
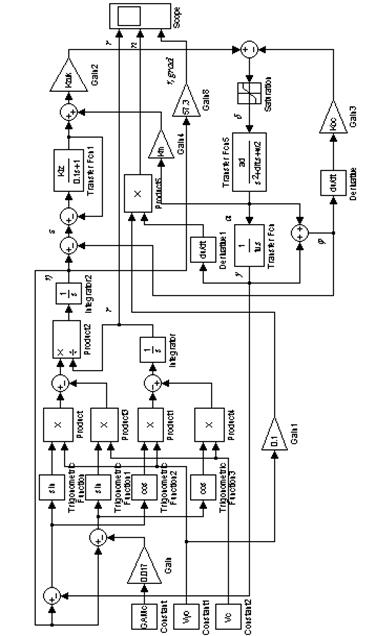
Полная схема моделирования представлена на рис.3.3.
В состав кинематического звена входят блоки Trigonometric Function 0..3, пять умножителей Product 0..4, интеграторы Integrator, Integrator2 и два сумматора. В состав измерительного звена входят два сумматора и инерционное звено Transfer Fcn1. Модель звена выработки команд состоит из сумматора и блоков Gain4, Gain2. С помощью блоков Gain1, Derivative1, Product5 измеряется перегрузка УО. Блок Gain6 служит для преобразования угла линии визирования из радианной меры в градусную, а блок Gain – для преобразования курсового угла цели из градусов в радианы. Введение последних двух блоков позволяет повысить удобство задания и считывания информации.








