 2015-09-06
2015-09-06 344
344Моделирование системы проводится по индивидуальным заданиям. При этом в качестве исходных данных для моделирования звена УО-АП используются результаты, полученные в работе №1. В частности, в колебательное звено входят параметры ad, dlt, w2, в интегрирующем звене – параметр tv. Коэффициент обратной связи по скоростному гироскопу Koc выбирается по результатам работы №1.

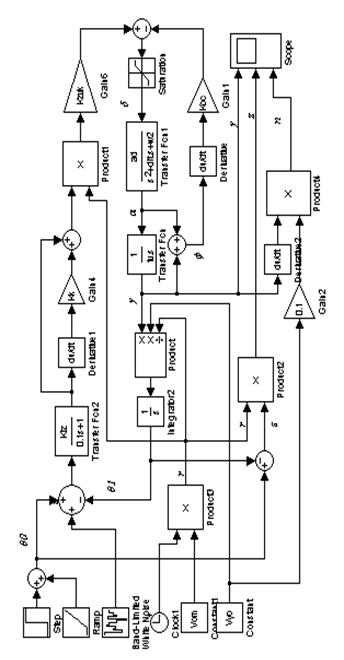
Параметры ограничителя Saturation выбираются исходя из непревышения перегрузки значения 20 ед. Константой задается скорость УО – Vуо. Константа Vот – относительная скорость ПУ-УО задается исходя из соотношения Vот = Vуо – Vн , где Vн – скорость носителя, рекомендуемое значение – 200-250 м/с.
В зависимости от исходных данных следует произвести настройку контура путем экспериментального подбора коэффициентов. В качестве начальных значений коэффициентов рекомендуются следующие:
Kiz = 30 – статический коэффициент передачи измерительного звена;
Kk = 2 – коэффициент корректирующей цепи;
Коэффициенты, указанные цифрами, модифицировать не рекомендуется.
В результате выполнения работы исследуется три режима:
- отработка статического воздействия, задаваемого генератором перепада напряжения Step. Напряжение генератора имеет физический смысл начального угла рассогласования, выраженного в радианах. Перепад задается значениями: начальный уровень 0, конечный уровень 0.2. Момент перепада 0.
- исследование работы системы при воздействии шумов. Шум генерируется генератором белого шума. При этом задается спектральная плотность S0 (параметр Noise Power) и дискрет времени Dt (параметр Sample time). Дисперсия шума рассчитывается по формуле D = S0/Dt.
- Исследование динамической ошибки, т.е. ошибки, вызванной перемещением цели. Угловое перемещение цели имитируется генератором линейно-изменяющегося напряжения Ramp. Рекомендуемое значение скорости изменения напряжения (параметр Slope) – 0.01 В/с, начиная с момента времени 0.
При настройке системы следует добиваться минимального промаха, минимума переколебаний и недопущения превышения заданной перегрузки.








