 2015-10-16
2015-10-16 399
399В електроприводах обладнання для експлуатації та ремонту автомобілів використовують двигуни змінного та постійного току. Найбільш поширені асинхронні електродвигуни змінного струму з короткозамкненим ротором.
Для поступального руху робочих органів обладнання для експлуатації та ремонту автомобілів широко використовують суміщення електродвигуна, редуктора (конічного, черв’ячного, циліндричного) і гвинта (рис. 20.3).
|
|
|
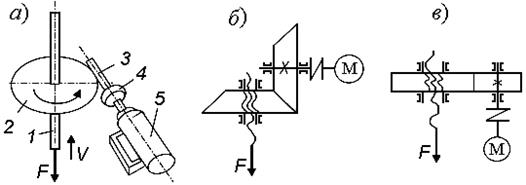
Рис. 20.3. Електропривод з гвинтовою передачею:
а – схема з черв’ячним редуктором; б – з конічним редуктором;
в – з циліндричним редуктором
Вал двигуна 5 (рис. 20.3, а) з’єднано муфтою 4 з черв’яком 3. Черв’ячне колесо 2 редуктора має нарізку і служить одночасно гайкою гвинту 1. При обертанні черв’яка черв’ячне колесо (гайка) обертається, а гайка гвинта рухається поступально. Переваги такої конструкції – простота, надійність, реверсивність, компактність при великому навантаженні, можливість забезпечення великої точності руху, а також автоматизація управління робочим органом. Недоліки – значні втрати на тертя та мале значення ККД, неможливість використання при великих швидкостях руху.
Потужність електричного двигуна визначається за формулою
 , (20.6)
, (20.6)
де F г – зусилля, яке прикладене до гвинта;
V г – швидкість осьового переміщення гвинта;
ηч, ηг – ККД черв’ячної та гвинтової пари відповідно.
За результатами оцінки розрахункової потужності двигуна підбирається тип електродвигуна (табл. 20.2).
Таблиця 20.2
Трьохфазні асинхронні, короткозамкнуті
двигуни серії 4А (ГОСТ 19523-74)
| Тип двигуна | Потужність, N, кВт | Синхронна частота обертання, n, об/хв | Тип двигуна | Потужність, N, кВт | Синхронна частота обертання, n, об/хв |
| 4А71В2У3 | 1,1 | 4А80В6У3 | 1,1 | ||
| 4А80А2У3 | 1,5 | 4А90L6У3 | 1,5 | ||
| 4А80B2У3 | 2,2 | 4А100L6У3 | 2,2 | ||
| 4А90L2У3 | 3,0 | 4А112MA6У3 | 3,0 | ||
| 4А100S2У3 | 4,0 | 4А112MB6У3 | 4,0 | ||
| 4А100L2У3 | 5,5 | 4А132S6У3 | 5,5 | ||
| 4А112M2У3 | 7,5 | 4А132M6У3 | 7,5 | ||
| 4А132M2У3 | 11,0 | 4А160S6У3 | 11,0 | ||
| 4А80А4У3 | 1,1 | 4А90LB8У3 | 1,1 | ||
| 4А80В4У3 | 1,5 | 4А100L8У3 | 1,5 | ||
| 4А90L4У3 | 2,2 | 4А112MA8У3 | 2,2 | ||
| 4А100S4У3 | 3,0 | 4А112MB8У3 | 3,0 | ||
| 4А100L4У3 | 4,0 | 4А132S8У3 | 4,0 | ||
| 4А112M4У3 | 5,5 | 4А132M8У3 | 5,5 | ||
| 4А132S4У3 | 7,5 | 4А160S8У3 | 7,5 | ||
| 4А132M4У3 | 11,0 | 4А160M8У3 | 11,0 |
Знаючи висоту підйому Н, час підйому Т та крок різьби t знаходять частоту обертання гвинта
 , об/хв, (20.7)
, об/хв, (20.7)
та необхідне передаточне число редуктора
uр = n ед / n гв. (20.8)
Редуктор може бути як черв’ячний, так і шестерний. Краще прийняти черв’ячний, бо він забезпечує додаткове самогальмування.








