 2015-10-16
2015-10-16 336
336Для обладнання, що працює з малими швидкостями руху в ненапруженому режимі, а також для механізмів допоміжного призначення застосовують ручний привод. Вручну приводяться механізми підйому малої вантажопідйомності, пересування й повороту. Розрахунок всіх механізмів ведуть за єдиною методикою.
Механізм підйому (рис. 20.1) складається з барабана діаметром D бар, на який намотують канат з підвішеним до нього вантажем
вагою G вт, редуктора із шестірнями z 1, z 2, z 3 і z 4, із загальним передаточним числом, рівним u 0 = u 1 · u 2,і приводного елемента – рукоятки довжиною lp або тягового колеса такого ж радіуса, до яких прикладається сила робітника Fp. На валу з одною рукояткою можуть одночасно працювати один або два робітники; на валу із двома рукоятками – два або чотири; на ланцюзі тягового колеса – не більше трьох робітників.
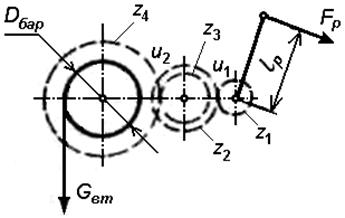
Рис. 20.1. Схема механізму підйому з ручним приводом
Робочий момент Мр = φ · n · Fp · lp,
де n – кількість робітників;
φ– коефіцієнт, враховуючий неодночасність прикладення сили при спільній роботі кількох людей (для двох робітників φ = 0,8; для трьох – φ = 0,75 і для чотирьох – φ= 0,7).
Момент опору на валу барабана від ваги вантажу
М вт = S · D бар /2, (20.1)
де S – сила натягу тягового елемента на барабані.
При розрахунку привода механізму пересування момент опору на валу ходових коліс визначається Мс = W · D х.к. /2,
де W – сила опору пересуванню; D х.к. – діаметр ходового колеса.
Для механізму повороту маємо Мс = Σ Мсi, де Mсi – моменти опору від вертикальних і горизонтальних реакцій в опорах щодо осі обертання поворотної частини крана. Необхідне передаточне число механізму між вхідним (приводним) і вихідним валами лебідки становить
u 0 = Мс / (Мр · η),
де η– ККД передачі.
Інерційними навантаженнями при розрахунку ручного привода, як правило нехтують. При розрахунку варто враховувати, що залежно від тривалості роботи сила Fp, що розвивається робітником, і швидкість руху його руки змінюються. Їхні середні значення наведені в табл. 20.1.
Таблиця 20.1








