 2015-10-13
2015-10-13 3943
3943Для обеспечения непрерывного зацепления двух тел с постоянным передаточным отношением их сопряженные поверхности должны быть очерчены по кривым, удовлетворяющим основному закону зацепления, который формулируется следующим образом: общая нормаль к сопряженным профилям, проведенная в точке их касания, делит меожосевое расстояние на части, обратно пропорциональные угловым скоростям.
Для доказательства сформулированной теоремы рассмотрим два зацепляющихся тела, вращающихся с постоянными угловыми скоростями ω1 и ω 2 вокруг неподвижных осей О1 и О2 (рис. 7.2).
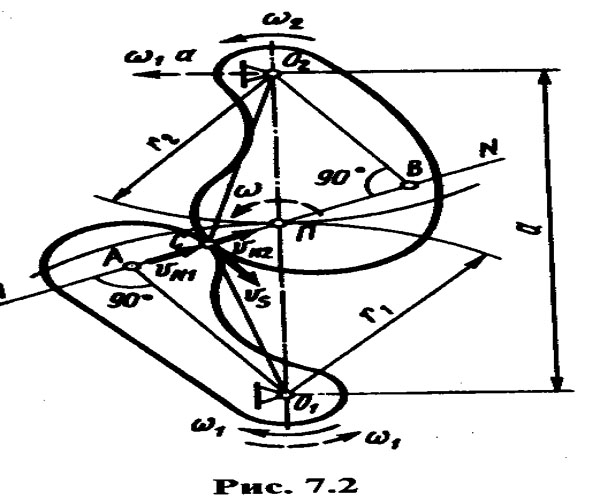
Для передачи силы давления одного тела на другое в точке С их контакта должна быть общая нормаль NN к сопряженным профилям, которая пересечет линию центров О1О2 в точке П. Опустим перпендикуляры О1А и О2В из центров вращения на нормаль NN, а через точку П проведем две дуги окружности радиусов r1 и r2. Согласно законам вращательного движения, векторы скоростей точек С контакта двух тел перпендикулярны радиусам, проведенным из центров вращения в точку касания, и равны по модулю:
νC1= ω1* О1C. νC2= ω2* О2C
Разложим мысленно векторы скоростей точек С контакта двух тел на направление нормали и касательной к профилю; нормальные составляющие, согласно стандарту, обозначаются vN1 и vN2 и называются нормольной контактной скоростью (рис. 7.2), а касательные составляющие обозначаются vA и vB, и называются касательной контактной скоростью (на рис. 7.2 они не показаны).
Очевидно, что для непрерывного зацепления двух тел необходимо, чтобы
в противном случае первое тело должно внедряться во второе либо отстать от него. Очевидно также, что абсолютные скорости vA и vB точек А и В направлены по нормали NN и эти скорости должны быть равны нормальной контактной скорости, т. е.
vA= vN1= vN2= vB
в противном случае произошло бы изменение размеров контактирующих тел.
Принимая во внимание, что треугольники АО1П и ВО2П подобны и что
vA = ω1 • АО1 =vB =ω2 • BО2, получим
Итак, для сохранения постоянного передаточного отношения и = ω1/ω2 = const точка П, называемая полюсом зацепления, должна сохранять на линии центров постоянное положение и делить межосевое расстояние а в отношении r1/r2. Теорема доказана.
Основной закон зацепления имеет общий характер и справедлив также для случаев, когда передаточное отношение должно изменяться во времени, при этом полюс зацепления не остается неподвижным, но будет перемещаться вдоль линии центров, а механизмы, осуществляющие подобное движение, имеют некруглые зубчатые колеса.
Окружности радиусов r1 и r2 проходящие через полюс, называются начальными; окружная скорость точек, лежащих на этих окружностях, одинакова и равна
ν = ω1 r1 = ω2 r2
Для рассмотрения относительного движения тел используем применяемый в теории механизмов и машин метод обращения движений (метод остановки), т. е. сообщим всей системе вращение вокруг оси О1 с угловой скоростью со, в направлении, противоположном первоначальному (см. рис. 7.2). Тогда первое тело остановится, второе будет совершать сложное плоскопараллельное движение, состоящее из вращения вокруг осей О1 и О2 одновременно, а его движение по отношению к неподвижному первому телу можно рассматривать, применяя метод мгновенных центров скоростей, известный из теоретической механики.
Ранее мы установили, что окружные скорости точек, лежащих на начальных окружностях радиусов r1 и r2, всегда равны, следовательно, если первая окружность остановлена, то вторая будет катиться по первой без скольжения, а точка П станет мгновенным центром скоростей второго тела. Для определения мгновенной угловой скорости со запишем скорость оси О2 в виде равенства:
v02 = ω1 a = ω2 r2
Так как а = r1 + r2. a ω1 r1 = ω2 r2
ω= ω1 (r1 + r2) /r2 = ω1 r1 /r2 + ω1, = ω1 + ω2.
Итак, после остановки первого тела второе будет вращаться вокруг полюса с мгновенной угловой скоростью ω = ω1 + ω2. Отсюда следует, что точка С контакта второго тела будет скользить по поверхности первого тела (см. рис. 7.2) со скоростью,
υs = ω • ПС = (ω1+ω2)ПС,
которая называется скоростью скольжения контактных точек. Скорость скольжения прямо пропорциональна расстоянию контактных точек от полюса. Скольжение контактных точек сопровождается трением.
Очевидно, что при зацеплении в полюсе скорость скольжения будет равна нулю, а после перехода точки контакта за полюс вектор скорости скольжения, как и сила трения, изменит направление на противоположное.
Требованиям основного закона зацепления удовлетворяют различные кривые, но наибольшее применение имеет эвольвентное зацепление, предложенное в середине XVIII в. Л. Эйлером; кроме того, в машиностроении применяется круговое зацепление, предложенное в 1954г. М. Л. Новиковым, а в приборостроении — циклоидальное и некоторые другие виды зацепления.
Свойства эвольвентного зацепления. Эвольвентой или разверткой окружности называют плоскую кривую, которая описывается любой точкой прямой NN, перекатываемой без скольжения по неподвижной окружности (рис. 7.3). Линию .NN называют производящей прямой, а окружность диаметра db, по которой эта прямая перекатывается, — основной окружностью. Так как перекатывание производящей прямой по основной окружности происходит без скольжения, то в каждый данный момент точка их касания является мгновенным центром скоростей и центром кривизны эвольвенты, следовательно, производящая прямая в каждом своем положении будет нормалью к эвольвенте, иначе говоря, нормаль эвольвенты всегда является касательной к основной окружности.
. 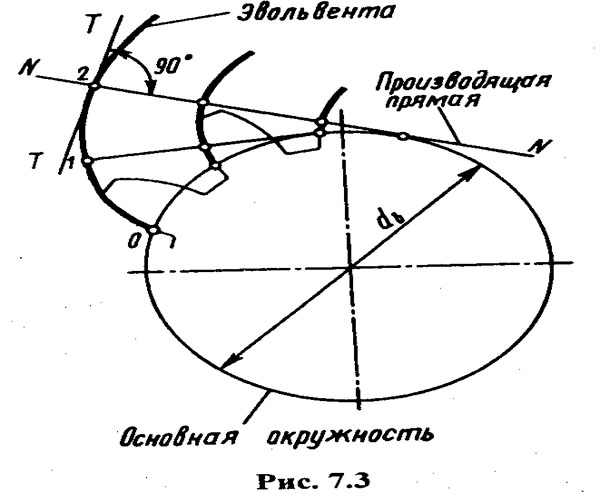
Из способа образования эвольвенты следует, что эта кривая не может существовать внутри основной окружности. Если перекатывать производящую прямую в противоположном направлении, то получим другую ветвь эвольвенты — левую (эвольвенты, изображенные на рис. 7.3 жирной линией, правые). Каждый зуб колеса с эвольвентным зацеплением очерчивается участками правой и левой эвольвент рис 7.3форма зубьев внутри основной окружности определяется профилем зуборезного инструмента. Две одноименные (правые или левые) эвольвенты эквидистантные (равноудаленные) кривые, т. е. имеющие между собой одинаковое расстояние по любой общей нормали, равное длине дуги основной окружности между началом эвольвент.
Очевидно, что с увеличением диаметра db основной окружности радиусы кривизны эвольвенты будут увеличиваться, а в пределе при db→ ∞эвольвента обращается в прямую, следовательно, у рейки с эвольвентным зацеплением профиль зубьев должен быть прямолинейным. Именно поэтому в основу проектирования цилиндрических и конических зубчатых колес эвольвентного зацепления положены стандартные исходные контуры, представляющие собой контур рейки с зубьями прямолинейного профиля (см. рис. 7.7).
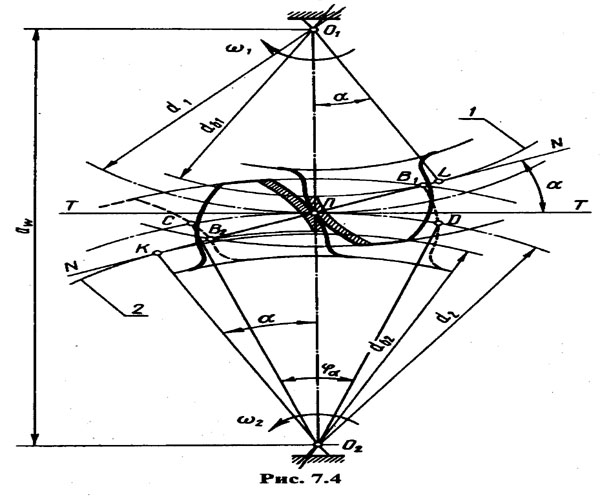
Рассмотрим (рис. 7.4) схему эвольвентного зацепления пары зубьев колес, вращающихся вокруг осей О1 и О2 с угловой скоростью ω1 и ω2 Положение полюса зацепления П определяется согласно основной теореме зацепления, а общая нормаль NN к профилям зубьев в точке контакта — касательная к основным окружностям 1 и 2, диаметры которых в соответствии со стандартом обозначены db1 и db2. Так как основные окружности имеют постоянный диаметр, то общая нормаль NN и полюс П будут занимать постоянное положение, следовательно, точка контакта зубьев перемещается по общей нормали, называемой поэтому линией зацепления. Прямая линия зацепления присуща только эвольвентному зацеплению.
Угол α между линией зацепления NN и общей касательной ТТ к начальным окружностям называется углом зацепления; его стандартное значение для эвольвентного зацепления α = 20°.
Если для той же пары колес немного изменить межосевое расстояние aw то изменится угол зацепления α, но диаметры основных окружностей останутся неизменными.
Так как dbl = db1cosα, db2 = d2cosα (рис. 7.4), то передаточное отношение
u =  = d2/d1 = db2/db1.
= d2/d1 = db2/db1.
Таким образом, передаточное отношение эвольвентного зацепления зависит только от диаметров основных окружностей, следовательно, изменение межосевого расстояния не влияет на кинематическую точность эвольвентного зацепления, что является весьма существенным его
достоинством.
При изменении межосевого расстояния aw окружности диаметров d1 и d2, перестанут касаться друг друга в полюсе П, т. е. появятся новые начальные окружности, которые будут проходить через полюс Я и в процессе зацепления перекатываться друг по другу без скольжения; поэтому окружности диаметров d1 и d2, не зависящие от межосевого расстояния, будем впредь называть делительными. Если межосевое расстояние передачи точно равно полусумме диаметров делительных окружностей, то начальные и делительные окружности совпадают. Таким образом, начальная окружность — понятие кинематическое и для отдельно взятого зубчатого колеса не существует. Основные параметры зубчатого колеса определяются по делительной окружности.
Зуб колеса расположен между окружностью вершин зубьев и окружностью впадин. Участок В1В2 линии зацепления NN (рис. 7.4), заключенный между окружностями вершин зубьев, называется активной линией зацепления. Часть профиля зуба, по которой происходит взаимодействие с зубом парного колеса, называется активным профилем зуба (на рис. 7.4 активные профили отштрихованы).
Угол поворота колеса передачи от положения входа зуба в зацепление до положения выхода из него называется углом перекрытия и обозначается φγ (у косозубой передачи угол перекрытия (р7 состоит из угла торцового перекрытия φα (см. рис. 7.4) и угла осевого перекрытия φβ).
Центральный угол τ (см. рис. 7.6), равный 2π/z или 360°/z (где z — число зубьев колеса), называется угловым шагом. Отношение угла перекрытия колеса к его угловому шагу называется коэффициентом перекрытия передачи и обозначается ε, тогда
εу=φγ/π.
Для обеспечения непрерывности зацепления необходимо выполнить условие
φγ > π или εγ > 1,
иначе пара зубьев выйдет из зацепления раньше, чем войдет в зацепление следующая пара. Таким образом, если ε < 2, период зацепления одной пары зубьев состоит из периода однопарного и периода двупарного зацепления. Чем больше коэффициент перекрытия, тем меньше период однопарного зацепления; зацепление в полюсе всегда будет однопарным.
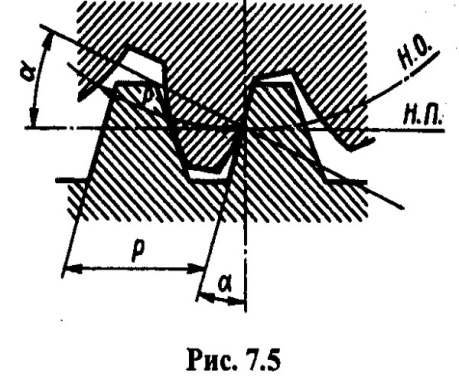
На рис. 7.5 изображено зацепление зубчатого колеса с рейкой, в котором начальная окружность (Н.О.),колеса перекатывается без скольжения по начальной прямой (Н.П.) рейки. Угол профиля зуба рейки и угол зацепления, обозначенные α, равны между собой.2

