 2015-10-13
2015-10-13 1107
1107ПЛАНЕТАРНЫЕ И ВОЛНОВЫЕ ЗУБЧАТЫЕ ПЕРЕДАЧИ
Планетарные передачи
Планетарными называют передачи, имеющие колеса с перемещающимися геометрическими осями.
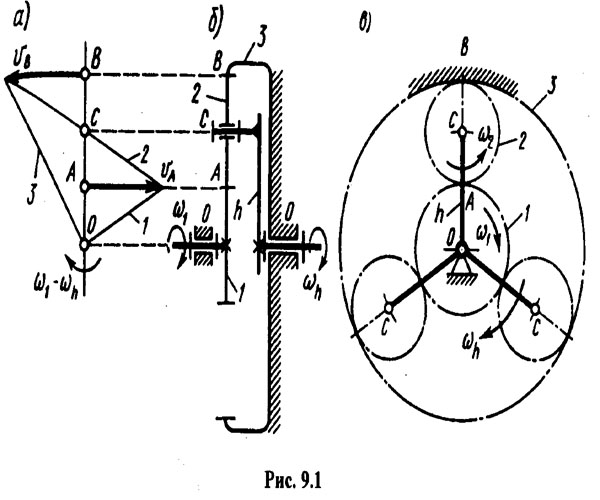
На рис. 9.1, а — в изображена схема четырехзвенной простейшей планетарной зубчатой передачи, состоящей из центрального вращающегося колеса 1 с неподвижной геометрической осью; сателлитов 2, оси которых перемещаются; неподвижного колеса 3 с внутренними зубьями; вращающегося водила h, на котором установлены сателлиты. Очевидно, что при работе планетарной передачи сателлиты 2 совершают сложное (плоскопараллельное) движение.
Ведущим в планетарной передаче может быть либо центральное колесо, либо водило. При заданной угловой скорости ведущего звена угловые скорости всех остальных звеньев получают вполне определенные значения, поэтому рассматриваемая планетарная передача имеет постоянное передаточное отношение.
Если в планетарной передаче (рис. 9.1) освободить неподвижное колесо 3 и сообщить ему дополнительное вращение, то рассматриваемый механизм превратится в дифференциальный, передаточное отношение которого будет одновременно зависеть от угловых скоростей двух звеньев.
Планетарные передачи могут быть одно- и многоступенчатыми.
Достоинства планетарных передач заключаются в малой массе и габаритах конструкций по сравнению с непланетарными зубчатыми передачами, а также в возможности получения больших передаточных чисел (до 1000 и более). Использование в передаче нескольких равномерно расположенных сателлитов распределяет передаваемую мощность на несколько потоков и позволяет уравновесить радиальные нагрузки на валы и их опоры.
Недостатки планетарных передач: повышенные требования к точности изготовления и сборки конструкции, а также сравнительно невысокий КПД у многоступенчатых передач.
Планетарные зубчатые механизмы широко распространены в машиностроении и приборостроении.
Передаточное отношение. Для определения передаточного отношения и изображенной на рис. 9.1 передачи воспользуемся методом обращения движений (в применении к планетарным передачам он называется методом Виллиса).
Пусть ведущим звеном передачи является зубчатое колесо 1, вращающееся с угловой скоростью ω1; угловую скорость водила обозначим ωh.
При остановленном водиле построим график окружных скоростей точек вертикального радиуса колес, как показано на рис. 9.1, а. Из этого графика видно, что окружные скорости всех колес будут равны, т. е. vA - vB.
Обозначив радиусы колес 1 и 3 r1 и r3, получим
va=(ω1-ωh)r1, vb=ωhr3.
Приравняв правые части этих равенств, учитывая, что радиусы зубчатых колес пропорциональны числам их зубьев, получим формулу для определения передаточного отношения и планетарной передачи (при ведущем колесе 1):
u = ωl/ωh = 1 + z3/z1,
где z3,z1 — числа зубьев центрального и неподвижного колес.
В подавляющем большинстве случаев на практике применяют планетарные передачи (с постоянным передаточным отношением), составленные из цилиндрических зубчатых колес. Конические зубчатые колеса используют преимущественно в дифференциальных механизмах.
Конический дифференциал. Этот механизм широко используется в автомобилях, тракторах, металлорежущих станках, счетно-решающих устройствах. На рис. 9.2 изображена схема автомобильного дифференциала. Он состоит из конических зубчатых колес б и 7, которые насажены на ведущие полуоси автомобиля и сцепляются с сателлитом 4, свободно сидящим на оси, закрепленной во вращающемся водиле h. Водило приводится в движение от двигателя с помощью конической зубчатой пары 3 и 2.
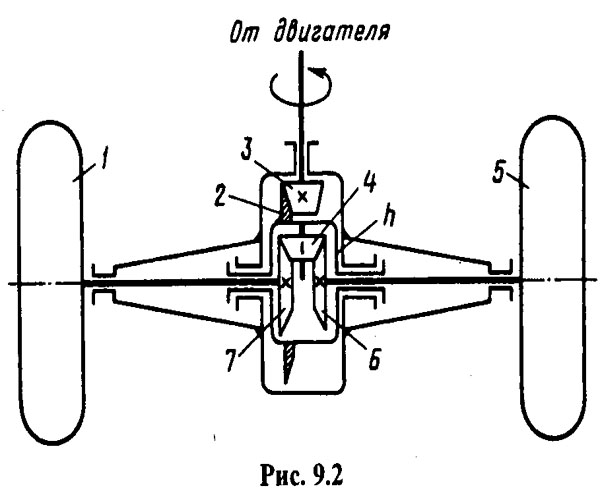
При движении автомобиля на закруглениях колесо, движущееся по внешней кривой, проходит больший путь, чем колесо, движущееся по внутренней кривой. Если оба колеса автомобиля закрепить на одной оси, то неизбежно скольжение покрышек по дороге и их повышенный износ. При наличии дифференциала сателлит 4 обкатывает колеса 6 и 7 и одновременно вращается вокруг своей оси, в результате чего угловые скорости полуосей и ведущих колес автомобиля окажутся различными и скольжение покрышек по дороге будет предотвращено.

