 2015-10-22
2015-10-22 2099
2099Идея основной теоремы зацепления была высказана английским ученым Р. Виллисом в 1841 г. при разработке классификации механизмов на основе на основе анализа отношения скоростей звеньев.
Пусть передача между двумя осями О1 и О2 с угловыми скоростями ω1 и ω2 осуществляется посредством 2-х взаимоогибаемых кривых К1 и К2 (рисунок 4.22, а).
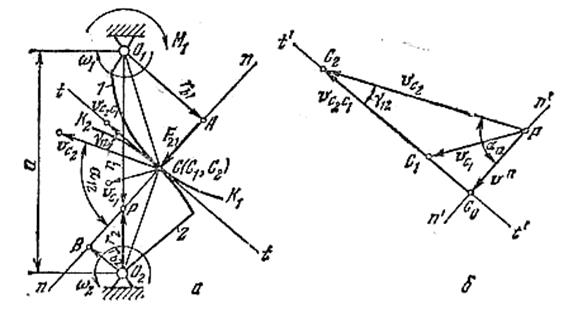
а - схема механизма с высшей парой; б - план скоростей.
Рисунок 4.22 - К выводу основного закона зацепления
Проведем в точке соприкосновения С кривых К1 и К2 и нормаль n-n и касательную t-t к этим кривым. В точке С соединяются две кривые, поэтому будут две точки: С1, принадлежащая кривой К1, и С2, принадлежащая кривой К2. Скорость точки С1 известна по величине и направлению. Определим скорость точки С2 методом планов (см. гл.2, §2.4, п.2.4.2). Выбираем масштабный коэффициент плана сил μV = VC1/[PVC1] = ( ). Записываем векторное уравнение плана скоростей
). Записываем векторное уравнение плана скоростей
 VC2=VC1+VC2C1|| t-t
VC2=VC1+VC2C1|| t-t
VC2=VO2+VC2O2^ СО2.
Построенный план скоростей представлен на рисунке 4.22, б.
Из точек О1 и О2 опускаем на нормаль перпендикуляры О1А и О2В, а из полюса плана скоростей опустим перпендикуляр РVco на линию действия скорости VC2C1. Отрезок PVco представляет собой нормальную составляющую Vn векторов скоростей VC1 и VC2, т.е. VCo=VA± VB=Vn.
Рассмотрим треугольники ΔО1АС1 и ΔРVСоС1 – они подобны по взаимно-перпендикулярным сторонам, т.е.
ΔО1АС1~ΔРVСоС1.
Аналогично ΔО2BС2~ΔРVСоС2.
Исходя из этого, составим пропорции:
О1А/О1С1=[РVСо]/РVС1;
О2В/О2С2=[РVСо]/РVС2.
Выразим из этих уравнений РVСо:
РVСо=О1А [РVС1]/О1С1;
РVСо=О2В [РVС2]/О2С2.
Эти равенства можно записать в действительных скоростях:
VСо = О1А VС1/О1С1;
VСо= О2В VС2/О2С2.
Приравняем правые части уравнений:
О1А VС1/О1С1=О2В VС2/О2С2.
Скорости точек С1 и С2 вычисляются по формулам VС1 =ω1О1С1, VС2=ω2 О2С2. С учетом этого, имеем:
О1А ω1 О1С1/О1С1 = О2В ω2 О2С2/О2С2.
После сокращения, получим следующее выражение
О1А ω1 = О2В ω2.
Отношение угловых скоростей есть передаточное отношение. В итоге получим формулу:
ω1/ω2 = О2В/О1А = RW2/RW1 = z2/z1 = U12, (4.15)
где RW1 и RW2 - радиусы начальных окружностей колес.
Равенство (4.15) называется основным законом зацепления, который гласит: нормаль в точке касания высшей кинематической пары качения и скольжения делит линию центров на части, обратно пропорциональные угловым скоростям.
Точка р, делящая линию центров О1О2 на части, обратно пропорциональные угловым скоростям, называется полюсом зацепления. Тогда межосевое расстояние a W будет равно
aW = [О1О2] = RW1 + RW2. (4.16)
4.2.3 Передаточное отношениецилиндрических редукторов
Как указывалось в п. 4.2.1., передаточным отношением называется отношение угловых скоростей зубчатых колес:
U12 = ω1/ω2. (4.17)
Зубчатые колеса в передаче могут соединяться по-разному. В случае одноступенчатой передачи для внешнего зацепления передаточное отношение имеет отрицательный знак, т.к. колеса вращаются в разные стороны
U12= - ω1/ω2.
Для внутреннего зацепления передаточное отношение имеет положительный знак, т.к. угловые скорости колес направлены в одну сторону
U12= + ω1/ω2.
Передаточное отношение можно определять также через отношение чисел зубьев колес, которыми обычно и задаются:
U12 = ± z2/z1. (4.18)
Передаточное отношение многоступенчатого зубчатого механизма есть произведение взятых со своими знаками передаточных отношений отдельных его ступеней, т.е.:
U1n= (-1)kU12×U23×U34×…·U(n-1)n. (4.19)
где k – число внешних зацеплений. Множитель (-1)k позволяет определить знак передаточного отношения сложного зубчатого механизма.
Ступень передачи – контакт (зацепление) двух колес.
Рассмотрим определение передаточного отношения для различного типа соединений.
Пример 1. Рассчитать передаточное отношение от первого колеса к пятому (от ведущего к ведомому) U14 для простого рядового соединения – зубчатые колеса расположены в один ряд (рисунок 4.23). Известны числа зубьев колес z1, z2, z3 и z4.
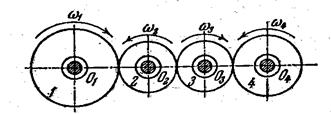
Рисунок 4.23 - Простое рядовое соединение
Решение. Количество ступеней (контактов) для данного соединения будет k =3. По формуле (4.19) имеем:
U15 = (-1)3 U12×U23×U34. (4.20)
Для каждой пары колес передаточное отношение определится по формуле (4.18), а именно:
U12 = z2/z1, U23 = z3/z2, U34 = z4/z3.
Подставив эти значения в формулу (4.20), получим:
U15 = (+)  .
.
После сокращения, имеем:
U14 =  . (4.21)
. (4.21)
В формулу (4.21) не входят угловые скорости 2-го и 3-го колес. Зубчатые колеса, от которых не зависит величина передаточного отношения, называют паразитными колесами. В действительности паразитные колеса выполняют большую роль. От них зависит направление вращения ведомого вала. Их введение влияет на знак передаточного отношения. Они необходимы для передачи движения при большом межосевом расстоянии.
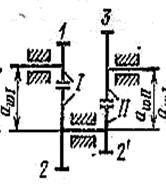
Пример 2. Рассчитать передаточное отношение ступенчатого соединения (рисунок 4.24).
Решение. Количество ступеней (контактов) для данного соединения будет k = 2. Представим передаточное отношение через произведение передаточных отношений каждой ступени (см. формулу 4.20):
U14 = (-1)2 U12×U2’3. (4.22)
|
Число внешних зацеплений будет равно 2, поэтому знак передаточного отношения получится положительный. Через числа зубьев имеем:
U13 = (+)  . (4.23)
. (4.23)
Таким образом, используя формулы (4.15), (4.18) и (4.19) можно рассчитать передаточное отношение любой передачи (не только зубчатой).

