 2017-11-30
2017-11-30 342
342Значною перевагою пакета МATLAB є можливість легкого виводу результатів розрахунків у вигляді графіків на екран.
Найпростішою формою подання інформації в графічному вигляді є створення двовимірного графіка. Для побудови таких графіків у середовищі пакета передбачено декілька функцій[1], розглянемо найбільш поширену рlоt - побудову графіка в декартовій системі координат.
Приклад:
% Розрахунок даних для побудови графіків
x = 0:0.05*pi:2*pi;
y1 = sin(x);
y2 = cos(x);
% Побудова графіків y1 = sin (x) та y2 = cos(x) на спільній координатній площині
plot (x,y1,x,y2)
Функція рlot автоматично відкриває нове вікно виводу графіків, якщо до цього воно ще не було відкрите. Якщо вікно виводу графіків вже було відкрите, то функція рlot використовує його як задане і попередній графік зникне. Для відкриття нового вікна для виводу необхідно виконати команду figure.
% Побудова графіків в окремих вікнах
figure
plot (x,y1)
figure
plot (x,y2)
Для оформлення графіків призначені наступні функції:
subplot - розташування у одному графічному вікні декількох графіків;
axis - зміна масштабу побудови на вісі x та y;
text - розташування підпису у заданому місці графічного вікна;
title - показ назви графіку;
xlabel - визначення назви горизонтальної вісі;
ylabel - визначення назви вертикальної вісі;
grid - нанесення (відміна нанесення) вимірювальної сітки.
Всі дії, що виконують функції axis, text, title, xlabel, ylabel, grid можна виконати безпосередньо на графіку, використовуючи меню вікна Графік (але тоді при повторенні цієї роботи зі змінами ви повинні бути всі ці редагування знов проробити).
Спробуйте додати до попередніх графіків ці функції і покажіть викладачу.
Функція subplot ділить вікно виводу графіків на частини.
% Поділ вікна на дві частині по вертикалі
subplot (211), plot (x,y1)
subplot (212), plot (x,y2)
% 21 – на скільки частин ділиться вікно по горизонталі
% та вертикалі, відповідно
% 1 і 2 – номера активної частини
Приклад.
% Результати експерименту
x=[1.5, 2.13, 2.6, 3.09, 3.6, 4.15, 4.52, 4.78, 5.2, 5.59, 6.77, 7.74, 8.55, 9.13, 10.58];
y=[80:20:180, 190, 200, 212, 220, 240, 252, 260, 264, 276];
% Апроксимаційний вираз
y1=239.984*atan (0.222*x);
% Вивід графіків та їх оформлення
plot(x,y,'ko',x,y1,'k:')
grid
axis ([0, 11, 0, 286])
ylabel('U,[B]')
xlabel ('Im, [A] ')
text (3,60,'o - експериментальні дані','FontName','Arial Unicode MS')
text (3,40,'--- - U=239. 984arctg (0.2221Im) ','FontName','Arial Unicode MS')
title ('Апроксимація характеристики неробочого ходу генератора',...
'FontName','Arial Unicode MS')
При виводізаголовків, підписів до вісей або інших кириличних написів може виникнути проблема – програма MATLAB неправильно відображає кириличні символи у вікні графіку. Вирішенням цієї проблеми є явне вказання шрифту у функціях, що виводять текст (так само, як це зроблено у наведеному вище прикладі). Для цього в функцію послідовно передається два додаткових параметра:
- назва властивості, що встановлюється наступним параметром (в даному випадку ′FontName′);
- нове значення цього параметру ('Arial Unicode MS' або інший Unicode шрифт, що має потрібні символи).
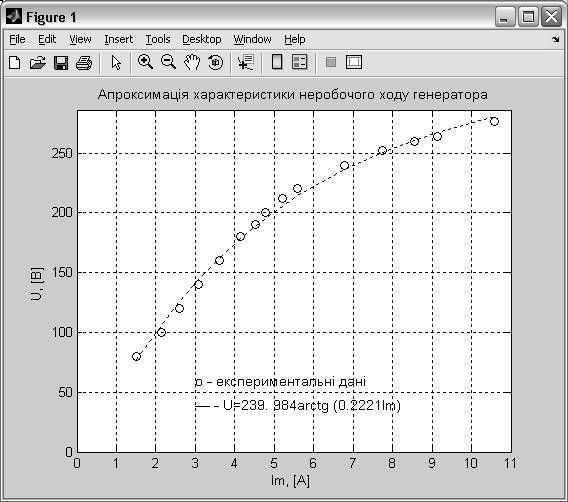
Рисунок 1.2 Вигляд графічного вікна після виконання прикладу.
2. Типові ланки та їхні динамічні властивості. ДАТЬ ВСЕ В ВИДЕ ТАБЛИЦЫ???
2.1 Підсилююча ланка відповідає рівнянню y=kx
Передаточна функція 
2.2 Інтегруюча ланка.
Інтегруючий елемент описується рівнянням
 , або
, або  ,
,
де x, y – вхідний та вихідний сигнали,
Т – стала часу,
у0 – початкова умова.
Передаточна функція ідеальної інтегруючої ланки має вигляд:
 ,
,
де s – оператор Лапласа.
При цьому

Передаточна функція реальної інтегруючої ланки має вигляд (Ts+1)-1
2.3 Інерційна ланка 1-го порядку.
Рівняння, яким описується інерційна ланка 1-го порядку, має вигляд:
 , (2.1)
, (2.1)
де х,у – вхідний та вихідний сигнали,
Т –стала часу,
К – коефіцієнт передачі.
Рівнянню (2.1) відповідає передаточна функція
 , (2.2)
, (2.2)
де X(s), Y(s) – перетворені за Лапласом х та у.
2.4 Коливальна ланка може бути описана рівнянням
 , (2.3)
, (2.3)
де х та у – вхідний та вихідний сигнали,
Т – стала часу,
d – параметр згасання,
К- коефіцієнт передачі.
Якщо d=0 – ланка має назву консервативна, якщо 0<d<1 – це коливальна ланка, якщо d  1 – це інерційна (аперіодична) ланка другого порядку.
1 – це інерційна (аперіодична) ланка другого порядку.
Рівнянню 2.3 відповідає передаточна функція
 , (2.4)
, (2.4)
2.5 Диференцююча ланка

Якщо знаменник відсутній - маємо ідеальну диференцюючу ланку, якщо Tд не дорівнює нулю – реальну диференцюючу ланку.
Існує ще декілька ланок - «цеглин», з яких по суті будується структурна схема системи керування, вони будуть розглянуті на момент використання.








