 2018-01-08
2018-01-08 2938
2938
Методом физических исследований является материалистическая диалектика, рассматривающая все явления окружающего нас мира в их взаимосвязи и взаимодействии, в их развитии и изменении. Поэтому рассматриваемые ниже методы физических исследований применимы и в других естественных науках.
Всякое физическое исследование начинается с наблюдения, т.е. с изучения физических явлений в естественной, природной обстановке. Затем на основании размышлений и логических обобщений высказывается рабочая гипотеза – научное предположение, объясняющее эти явления. Гипотеза проверяется экспериментом, т.е. изучением явлений путем их воспроизведения в искусственных, лабораторных условиях. Гипотеза, подтвержденная экспериментом, становится научной теорией. Физическая теория представляет собой систему основных идей, обобщающих опытные данные и отражающих объективные закономерности природы. Физическая теория дает объяснение целой области явлений природы с единой точки зрения. Теория в дальнейшем подвергается неоднократной проверке практикой, которая вносит в теорию многочисленные дополнения и уточнения.
В связи с изложенным целесообразно сделать одно замечание о связи теории и эксперимента в физике. Теория играет исключительно важную роль. Без нее современная физика немыслима. Однако необходимо правильно представлять себе истинную роль теории в физике. Чистая теория в основном основывается на математике, а математика имеет дело с абстрактными объектами и понятиями, подчиняющимися определенной системе аксиом. Единственное требование, предъявляемое в чистой математике к ее понятиям и аксиомам, сводится к их логической непротиворечивости. Все свои результаты чистая математика получает из этих аксиом путем логических рассуждений, основанных на правилах формальной логики. Содержание этих результатов, очевидно, не может выйти за пределы логических связей между различными объектами и понятиями чистой математики. В этом смысле чистая математика является логически замкнутой дисциплиной. Такая замкнутость и логическая согласованность придают чистой математике, а, следовательно, и теории эстетическую привлекательность и доставляют чувство глубокого удовлетворения всякому уму.
Однако нужно заметить, что строго замкнутая сама в себе теория оторвана от реальной действительности и не может быть использована в других науках и практической деятельности человека. Чтобы теория стала мощным средством при физических исследованиях, необходимо установить связи между абстрактными математическими объектами и понятиями – с одной стороны – и реальными объектами и явлениями природы – с другой. Математические понятия и объекты должны появляться не как чисто логические категории, а как абстракции каких-то реальных объектов или процессов природы. Так, точка является абстракцией физического тела достаточно малых размеров, прямая линия – абстракцией достаточно тонкого твердого стержня или светового пучка в однородной среде. Вопрос о справедливости математики сводится к справедливости ее аксиом. Справедливость же самих аксиом может быть установлена опытным и только опытным путем.
Правда, опыт с математическими объектами нельзя осуществить в чистом виде, поскольку эти объекты являются идеализациями и не встречаются в природе. Всякий опыт выполняется с реальными телами. Математическую строгость надо понимать в смысле логической согласованности ее выводов, но не в смысле обоснования математических аксиом.
Одной математической строгости недостаточно для физики, как и для всякой другой опытной науки, имеющей дело с реальными объектами и явлениями природы. Всякое теоретическое исследование, выполненное математически строго, никогда не может считаться и физически строгим. Во-первых, такие исследования всегда основываются на определенных законах, справедливость которых в конце концов доказывается опытным путем, а опыты и физические измерения неизбежно сопровождаются ошибками, т.е. выполняются с определенной точностью. Вне пределов этой точности физический закон может оказаться не верным. Во-вторых, всякий реальный физический объект характеризуется бесконечным разнообразием свойств. Учесть все эти свойства невозможно не только потому, что большинство из них нам просто неизвестно, но и потому, что это практически не осуществимо. При построении теории физика заменяет реальные объекты их идеализированными моделями, приблизительно правильно передающими не все свойства реальных объектов, а только те из них, которые существенны в рассматриваемом круге вопросов. Какие свойства реальных объектов существенны, а какие не играют заметной роли – на этот вопрос в конце концов может ответить только опыт, которому принадлежит решающее слово в вопросе о правильности всякой физической теории и пределах ее применимости. Если физический закон применен вне области, где он справедлив, а идеализированная модель правильно передает не все свойства реальных объектов, существенные для рассматриваемого круга явлений, то возникающие вследствие этого пороки теории, понятно, не могут быть исправлены никакой строгостью математических рассуждений и расчетов.
Последнее замечание имеет и практическую ценность. Конечно, после того как идеализированная модель построена, не будет ошибкой производить все дальнейшие расчеты математически абсолютно точно, хотя при этом и использовались физические законы, верные только приближенно. Однако сплошь и рядом такие расчеты очень громоздки и даже практически не осуществимы из-за их сложности. Между тем точность уже обесценена ошибками физических законов и несовершенствами идеализированной модели, положенной в основу расчета. Поэтому можно и нужно перейти к приближенным расчетам. Такие расчеты столь же хороши, что и «точные», если их ошибки не превосходят ошибок, обусловленных неточностью применяемых физических законов и несовершенствами идеализированных моделей.
Механика — часть физики, которая изучает закономерности механического движения и причины, вызывающие или изменяющие это движение. Механическое движение — это изменение с течением времени взаимного расположения тел или их частей.
Развитие механики как науки начинается с III в. до н. э., когда древнегреческий ученый Архимед (287—212 до н. э.) сформулировал закон равновесия рычага и законы равновесия плавающих тел. Основные законы механики установлены итальянским физиком и астрономом Г. Галилеем (1564—1642) и окончательно сформулированы английским ученым И. Ньютоном (1643—1727).
Механика Галилея-Ньютона называется классической механикой. В ней изучаются законы движения макроскопических тел, скорости которых малы по сравнению со скоростью света с в вакууме. Законы движения макроскопических тел со скоростями, сравнимыми со скоростью с, изучаются релятивистской механикой, основанной на специальной теории относительности, сформулированной А. Эйнштейном (1879—1955). Для описания движения микроскопических тел (отдельные атомы и элементарные частицы) законы классической механики неприменимы — они заменяются законами квантовой механики.
В первой части нашего курса мы будем изучать механику Галилея—Ньютона, т. е. рассматривать движение макроскопических тел со скоростями, значительно меньшими скорости с. В классической механике общепринята концепция пространства и времени, разработанная И. Ньютоном и господствовавшая в естествознании на протяжении XVII—XIX вв. Механика Галилея—Ньютона рассматривает пространство и время как объективные формы существования материи, но в отрыве друг от друга и от движения материальных тел, что соответствовало уровню знаний того времени.
Механика делится на три раздела: 1) кинематику; 2) динамику; 3) статику.
Кинематика изучает движение тел, не рассматривая причины, которые это движение обусловливают.
Динамика изучает законы движения тел и причины, которые вызывают или изменяют это движение.
Статика изучает законы равновесия системы тел. Если известны законы движения тел, то из них можно установить и законы равновесия. Поэтому законы статики отдельно от законов динамики физика не рассматривает.
Механика для описания движения тел в зависимости от условий конкретных задач использует разные физические модели. Простейшей моделью является материальная точка - тело, обладающее массой, размерами которого в данной задаче можно пренебречь. Понятие материальной точки - абстрактное, но его введение облегчает решение практических задач. Например, изучая движение планет по орбитам вокруг Солнца, можно принять их за материальные точки.
Произвольное макроскопическое тело или систему тел можно мысленно разбить на малые взаимодействующие между собой части, каждая из которых рассматривается как материальная точка. Тогда изучение движения произвольной системы тел сводится к изучению системы материальных точек. В механике сначала изучают движение одной материальной точки, а затем переходят к изучению движения системы материальных точек.
Под воздействием тел друг на друга тела могут деформироваться, т. е. изменять свою форму и размеры. Поэтому в механике вводится еще одна модель - абсолютно твердое тело. Абсолютно твердым телом называется тело, которое ни при каких условиях не может деформироваться и при всех условиях расстояние между двумя точками (или точнее между двумя частицами) этого тела остается постоянным.
Любое движение твердого тела можно представить как комбинацию поступательного и вращательного движений. Поступательное движение - это движение, при котором любая прямая, жестко связанная с движущимся телом, остается параллельной своему первоначальному положению. Вращательное движение — это движение, при котором все точки тела движутся по окружностям, центры которых лежат на одной и той же прямой, называемой осью вращения.
Движение тел происходит в пространстве и во времени. Поэтому для описания движения материальной точки надо знать, в каких местах пространства эта точка находилась и в какие моменты времени она проходила то или иное положение.
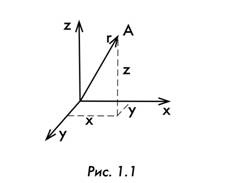
Положение материальной точки определяется по отношению к какому-либо другому, произвольно выбранному телу, называемому телом отсчета. С ним связывается система отсчета - совокупность системы координат и часов, связанных с телом отсчета. В декартовой системе координат, используемой наиболее часто, положение точки А в данный момент времени по отношению к этой системе характеризуется тремя координатами x, y, z или радиусом-вектором r, проведенным из начала системы координат в данную точку (рис. 1.1).
При движении материальной точки ее координаты с течением времени изменяются. В общем случае ее движение определяется скалярными уравнениями
x = x(t), у = y(t), z = z(t), (1.1)
эквивалентными векторному уравнению
r = r(t). (1.2)
Уравнения (1.1) и соответственно (1.2) называются кинематическими уравнениями движения материальной точки.
Число независимых координат, полностью определяющих положение точки в пространстве, называется числом степеней свободы. Если материальная точка свободно движется в пространстве, то, как уже было сказано, она обладает тремя степенями свободы (координаты х, у, z); если она движется по некоторой поверхности, то двумя степенями свободы, если вдоль некоторой линии, то одной степенью свободы.
Исключая t в уравнениях (1.1) и (1.2), получим уравнение траектории движения материальной точки. Траектория движения материальной точки - линия, описываемая этой точкой в пространстве. В зависимости от формы траектории движение может быть прямолинейным или криволинейным.
3.Система отсчета, траектория, скорость, ускорение и его составляющие.
Движение тел происходит в пространстве и во времени. Поэтому для описания движения материальной точки (МТ) надо знать, в каких местах пространства эта точка находилась и в какие моменты времени она проходила то или иное положение.
 |
Тело отсчета— произвольно выбранное тело, относит-но к-рого определяется положение остальных тел. Система отсчета— совокупность системы координат (СК) и часов, связанных с телом отсчета. Наиболее употребительна СК, именуемая декартовой— представлена 3-мя единичными по модулю и взаимно перпендикулярными векторами  (указывающими направление вдоль Ox, Oy, Oz, их совокупность называют ортонормированным базисом системы), проведенными из начала координат. Положение произвольной точки М характеризуется радиусом-вектором
(указывающими направление вдоль Ox, Oy, Oz, их совокупность называют ортонормированным базисом системы), проведенными из начала координат. Положение произвольной точки М характеризуется радиусом-вектором  соединяющим начало координат О с точкой
соединяющим начало координат О с точкой 
 Движение МТ полностью определено, если декартовы координаты МТ заданы как функции времени. В зависимости от траектории (линии, формирующей путь) движение тела (или МТ) может быть прямолинейным и криволинейным.
Движение МТ полностью определено, если декартовы координаты МТ заданы как функции времени. В зависимости от траектории (линии, формирующей путь) движение тела (или МТ) может быть прямолинейным и криволинейным.
 |
Различают длину пути точки - длину всех участков траектории, пройденных этой точкой за рассматриваемый промежуток времени,  скалярную функцию времени, и перемещение
скалярную функцию времени, и перемещение  вектор, проведенный из начального положения движущейся точки в положение ее в данный момент времени (приращение радиус-вектора точки за рассматриваемый промежуток Dt).
вектор, проведенный из начального положения движущейся точки в положение ее в данный момент времени (приращение радиус-вектора точки за рассматриваемый промежуток Dt).
Из других СК нередко используют сферическую,в ней положение точки Мзадается модулем радиуса-вектора r и двумя углами, один из них указывает направление радиуса-вектора r относительно вертикальной оси (угол склонения  2-ой – азимутальный угол
2-ой – азимутальный угол 
 |
Кинематич. величиной является скорость — это векторная величина, которая определяет как быстроту движения МТ (или тела), так и его направление в данный момент времени. Различают вектор средней скорости МТ за интервал Dt времени - отношение приращения радиуса-вектора точки k промежутку времени  направление вектора средней скорости совпадает с направлением
направление вектора средней скорости совпадает с направлением  Для характеристики движения, темп к-рого м-т меняться на разных участках пути, пользуются мгновенной скоростью. Мгновенная скорость — векторная величина, равная первой производной по времени от радиуса-вектора
Для характеристики движения, темп к-рого м-т меняться на разных участках пути, пользуются мгновенной скоростью. Мгновенная скорость — векторная величина, равная первой производной по времени от радиуса-вектора  рассматриваемой точки:
рассматриваемой точки:  Вектор мгновенной скорости направлен по касательной к траектории в сторону движения. Единица скорости — м/с. Важной характеристикой переменного движения является ускорение — векторная величина, определяющая быстроту изменения скорости по модулю и направлению. Также различают среднее и мгновенное ускорение. Мгновенное ускорение МТ — векторная величина, равная первой производной по времени скорости рассматриваемой точки (второй производной по времени от радиуса-вектора этой же точки):
Вектор мгновенной скорости направлен по касательной к траектории в сторону движения. Единица скорости — м/с. Важной характеристикой переменного движения является ускорение — векторная величина, определяющая быстроту изменения скорости по модулю и направлению. Также различают среднее и мгновенное ускорение. Мгновенное ускорение МТ — векторная величина, равная первой производной по времени скорости рассматриваемой точки (второй производной по времени от радиуса-вектора этой же точки):  Единица ускорения— м/с2.
Единица ускорения— м/с2.
В общем случае плоского криволинейного движения вектор ускорения удобно представить в виде суммы двух проекций:  Тангенциальное ускорение характеризует быстроту изменения скорости по модулю (рис.(А)), его величина:
Тангенциальное ускорение характеризует быстроту изменения скорости по модулю (рис.(А)), его величина:  Нормальное (центростремительное)ускорение
Нормальное (центростремительное)ускорение  направлено по нормали от траектории к центру ее кривизны О и характеризует быстроту изменения направления вектора скорости точки. Величина
направлено по нормали от траектории к центру ее кривизны О и характеризует быстроту изменения направления вектора скорости точки. Величина  нормального ускорения связана со скоростью движения по кругу и величиной радиуса R (рис
нормального ускорения связана со скоростью движения по кругу и величиной радиуса R (рис  Величина полного ускорения (рис
Величина полного ускорения (рис 
Ускорение и его составляющие
В случае неравномерного движения важно знать, как быстро изменяется скорость с течением времени. Физической величиной, характеризующей быстроту изменения скорости по модулю и направлению, является ускорение.
Рассмотрим плоское движение, т. е. движение, при котором все участки траектории точки лежат в одной плоскости. Пусть вектор v задает скорость точки А в момент времени t. За время t движущаяся точка перешла в положение В и приобрела скорость, отличную от v как по модулю, так и направлению и равную v1 = v + v.
Средним ускорением неравномерного движения в интервале от t до t+t называется векторная величина, равная отношению изменения скорости v к интервалу времени t:
<a> = v /t
Мгновенным ускорением а материальной точки в момент времени t будет предел среднего ускорения:
Таким образом, ускорение а есть векторная величина, равная первой производной скорости по времени.
Тангенциальная составляющая ускорения равна первой производной модуля скорости по времени, определяя тем самым быстроту изменения скорости по модулю.
 .
.
Нормальная составляющая ускорения направлена по нормали к траектории к центру ее кривизны (поэтому ее называют также центростремительным ускорением).
Полное ускорение тела есть геометрическая сумма тангенциальной и нормальной составляющих (рис. 1.3):

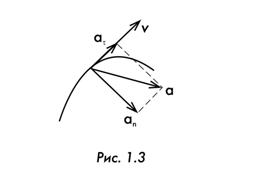
Итак, тангенциальная составляющая ускорения характеризует быстроту изменения скорости по модулю (направлена по касательной к траектории), а нормальная составляющая ускорения - быстроту изменения скорости по направлению (направлена к центру кривизны траектории).
В зависимости от тангенциальной и нормальной составляющих ускорения движение можно классифицировать следующим образом:
1) aτ = 0, an = 0 - прямолинейное равномерное движение;
 |
2) aτ = а = const, an= 0 - прямолинейное равнопеременное движение. При таком виде движения
Если начальный момент времени t1 = 0, а начальная скорость v1 = v0, то, обозначив t2 = t и v2 = v, получим а = (v – v0)/t, откуда

Проинтегрировав эту формулу в пределах от нуля до произвольного момента времени t, найдем, что длина пути, пройденного точкой, в случае равнопеременного движения
3) aτ = f(t), an = 0 - прямолинейное движение с переменным ускорением;
4) aτ = 0, an = const. При aτ = 0 скорость по модулю не изменяется, а изменяется по направлению. Из формулы an = v2/r следует, что радиус кривизны должен быть постоянным. Следовательно, движение по окружности является равномерным;
5) aτ = 0, an 0 - равномерное криволинейное движение;
6) aτ = const, an 0 - криволинейное равнопеременное движение;
7) aτ = f(t), an 0 - криволинейное движение с переменным ускорением.

