 2018-01-21
2018-01-21 2538
2538ЭМП – электромагнитное устройство, предназначенное для преобразования электрического сигнала с электронного усилителя в механическое перемещение (поворот) якоря (заслонки) электромагнита. На рис. № приведена принципиальная схема ЭМП рассматриваемого привода.
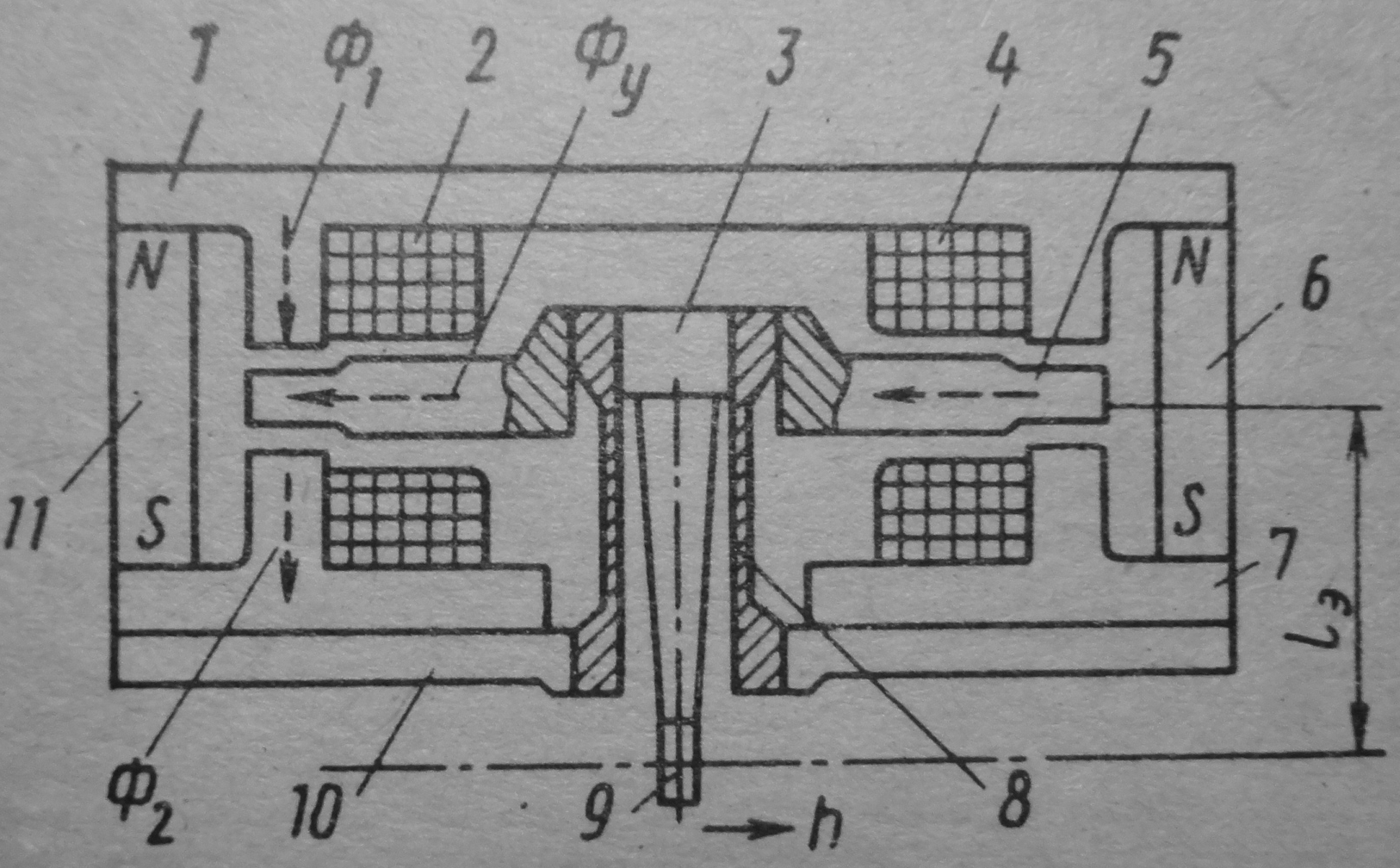
Рис. 5. Электро механический преобразователь
ЭМП состоит из магнитопроводов 1,7, постоянных магнитов 6,11, создающих постоянный поляризующий магнитный поток, обмоток управления 2,4 и поворотного якоря 5. Работа ЭМП основана на взаимодействии якоря с поляризованными магнитными потоками Ф1,Ф2, создаваемыми постоянными магнитами, и изменяемыми по величине и направлению магнитными потоками Фу, создаваемыми ампер витками обмоток управления. Якорь расположен между полюсами и перемещается в рабочем воздушном зазоре пераллельно линиям индукции магнитного поля. Усилие, развиваемое якорем электромагнита, обратно пропорционально величине воздушного зазора, т.е. чем больше угол поворота якоря, тем больше его момент. Поэтому такое устройство может работать как обычное двухпозиционное поляризованное реле. Нагрузочная характеристика такого электромагнита имеет положительную крутизну, при которой нейтральное положение якоря является неустойчивым. Для выполнения основного своего назначения – осуществления прямой пропорциональности между сигналом iу и углом поворота якоря или перемещением h заслонки 9, ЭМП имеет механическую пружину, которая возвращает якорь в нейтральное положение при iу=0. Функцию такой пружины выполняет тонкостенная упругая трубка-пружина 8. Нижний конец упругой трубки запрессован с помощью технологической операции запресовывание в основание 10, а на ее верхний конец насажен якорь электромагнита 5. Внутри упругой трубки находится заслонка, верхний конец которой 3 запресован в верхний конец упругой трубки. Тонкостенная упругая трубка выполняет не только функцию механической пружины, возвращающей якорь в нейтральное положение, но одновременно является герметизирующим устройством, отделяющим внутреннюю полость трубки, заполненную рабочей жидкостью, от воздушных зазоров электромагнитной системы ЭМП. Поэтому, такой тип ЭМП называют сухим. Защита рабочих воздушных зазоров герметизирующей упругой трубкой увеличивает надежность работы ЭМП, а отсутствие элементов с трением улучшает его динамические свойства. Статические характеристики ЭМП приведены на рис. №. 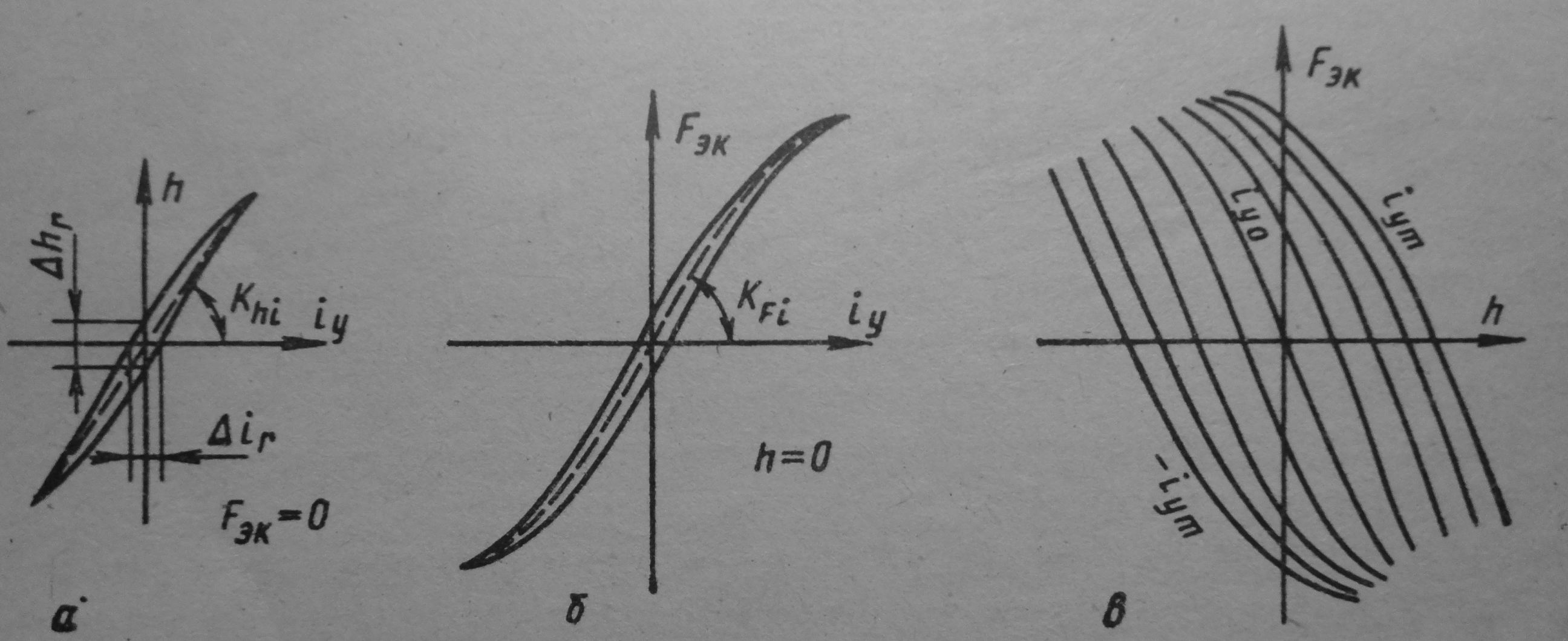
Рис. №. Статические характеристики ЭМП
Управляющая характеристика на рис. №, а, дает зависимость линейного перемещения заслонки h от тока управления iу при отсутствии внешней нагрузки на заслонку. Коэффициент Khi определяет крутизну начального участка управляющей характеристики
 .
.
Силовая характеристика на рис. № определяет зависимость силы Fэк, развиваемой якорем ЭМП, приведенной к точке заслонки, совпадающей с осью ГУ, от тока управления iу при h=0
 .
.
Коэффициент KFi характеризует жесткость силовой характеристики. Как видно из рис. № статические характеристики имеют петлю магнитного гистерезиса, возникающую при перемагничивании якоря. Ширина этой петли ∆i определяет величину зоны нечувствительности статических характеристик ЭМП.
Характеристики, имеющие петлю магнитного гистерезиса ухудшают динамические свойства ЭМП. В рассматриваемом ЭМП ширина петли не велика, она составляет ∆hг<5% и ею можно пренебречь. Вид обобщенной нагрузочной характеристики без учета гистерезиса дан на рис. №, в. Каждая линия этой характеристики дает зависимость изменения силы Fэк, iу и h близки к линейным и могут быть описаны как семейство параллельных прямых
 ,
,
где Cэм – коэффициент, характеризующий жесткость обобщенных характеристик.
Силовой гидроцилиндр
Гидроцилиндр состоит из стального цилиндра и свободно перемещающегося внутри него поршня, жестко связанного со штоком. Между поршнем и цилиндром устанавливаются уплотнительные устройства, уменьшающие перетечки жидкости из одной полости гидроцилиндра в другую.
Принцип работы гидроцилиндра прост (см рис. 4). Гидравлический поток жидкости Qзд с высоким давлением p1 поступает от гидрораспределителя в полость гидроцилиндра. Поршень под действием этого потока начинает перемещаться, вытесняя жидкость из второй полости с понижением давления р2 в магистраль слива рсл. В гидравлическом двигателе происходит преобразование энергии гидравлического потока в механическую энергию. Сила давления жидкости, действующей на рабочую площадь поршня Ап, равна:

, где  – рабочая площадь поршня;
– рабочая площадь поршня;
Dп – диаметр поршня;
dш – диаметр штока.
Момент, развиваемый поршнем гидроцилиндра на оси руля, равен:

Силовые гидроцилиндры имеют существенные преимущества по сравнению с другими типами гидродвигателей. Они просты по конструкции, надежны в работе и не требуют редуктора, кинематически связывающего двигатель с рулем. Основное достоинство гидроцилиндров, благодаря которому они получили большое распространение в рулевых приводах ЛА, состоит в том, что они способны развивать большие мощности и моменты на единицу своего объема и массы. Скорость перемещения поршня и поворота руля пропорциональны расходу жидкости, поступающей в гидроцилиндр: 
В этом уравнении принято, что у»l×d, что справедливо для малых углов поворота руля.








