 2018-01-21
2018-01-21 14512
14512З теоретичної механіки відомо, що тіло, що обертається, не надає динамічних дій на опори у тому випадку, коли головний вектор сил інерції і головний вектор моменту сил інерції ротора дорівнюють нулю. Ця умова завжди виконується, якщо його центр мас лежить на осі обертання і ця вісь є однією з головних центральних осей інерції, тобто ротор цілком урівноважений.
Розглянемо параметри, що характеризують неврівноваже ність ротора, і покажемо, яким чином можна досягти його цілковитої врівноваженості.
Хай ротор I з неврівноваженими масами обертається в опорах 2 з постійною кутовою швидкістю ω1 (Рис 3.1). Виберемо на роторі точку і з неврівноваженою масою mі і її координати хі,;уі. Радіус-вектор цієї точки rі; називається ексцентриситетом неврівноваженої маси mі. Він розташований під кутом αί до позитивного напряму осі Оіхі. Ексцентриситет можна виразити і через його проекції на координатні осі (Рис. 3.1):
 | 3.1 |
Таких неврівноважених точкових мас в роторі може бути будь-яка кількість.
При обертанні ротора від неврівноваженої точкової маси mі (Рис.1) виникає сила інерції
 | 3.2 |
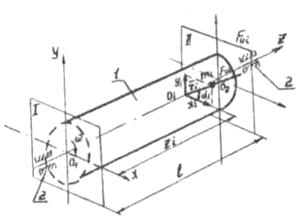
Рис 3.1
де добуток mі гі - дисбаланс точкової маси mі обозначаєтся буквою Dі. З урахуванням цього позначення рівність (3.2) набере виду  .
.
Через дві довільно вибрані на роторі точки О1 і О2 проведемо площину I і П перпендикулярно до осі обертання ротора. Помістимо в точку О1 початок координат нерухомої прямокутної системи О1хуz.
Вісь О1z направимо уздовж осі обертання ротора, осі О1х і О1у розташуємо в площині I.
Перенесемо силу Fui в площину I паралельно самій собі. Після перенесення отримаємо систему, що складається з сили Fui, прикладеної в точці О1, і пари сил з моментом
Мui =Fuizi
Таких сил інерції, що сходяться в точці О1, площини I, і пар сил, що лежать в площинах, перпендикулярних до площини О1ху і які пересікають вісь О1z буде стільки, скільки є в роторі неврівноважених мас.
Склавши сили інерції неврівноважених точкових мас і моменти їх пар, знайдемо головний вектор і головний момент від сил інерції по наступних рівнянням, записаним у векторній формі:
 | (3.3) |
 | (3.4) |
де mi; ri; Di; МDi - відповідно неврівноважена точкова маса, її_эксцентриситет, дисбаланс і момент дисбалансу точкової маси; Di і МD - головний вектор і головний момент дисбалансів.
При аналітичному методі визначення головного вектора і головного моменту сил інерції рівняння (3.3) і (3.4) проектуємо на осі х. і у після чого отримуємо
 | (3.5) |
 | (3.6) |
де Dх, D|у - проекції головного вектора дисбалансу на осях х і у або статичні моменти точкових неврівноважених мас щодо тих же осей; МDу = Dхz; МDх = Dуz - проекції головного моменту дисбалансів щодо осей х і у або відцентрові моменти інерції Jуz і Jхz.
З рівнянь (3.5) і (3.6) отримуємо модулі головного вектора сил інерції
 | (3.7) |
і головного їх моменту
 | (3.8) |
Неврівноваженість - це стан ротора, який характеризується таким розподілом мас, який під час обертання викликає змінні навантаження на опорах ротора і його вигин. За міру неврівноваженості вважають дисбаланс D. Для співставлення роторів різних мас вводять поняття «питомий дисбаланс», чисельно рівний ексцентриситету:
 |
де mр- маса ротора.
Якщо відомі координати центру мас ротора, то його ексцентриситет можна підрахувати по формулі
 |
3. Види неврівноваженості ротора
Розрізняють статичну, моментну і динамічну неврівноваженість ротора.
Статична неврівноваженість з'являється у випадку, якщо осі обертання ротора I (Рис.4.2,а) і його головна центральна вісь І паралельні. При цьому
 |
Ця неврівноваженість повністю визначається головним вектором дисбалансів D або ексцентриситетом ест.
При моментній неврівноваженості вісь ротора 1-1 перетинається в центрі мас S (Рис.3.2, б). При цьому
ест = 0; МDу=Jух = 0; МDу = Jхz = 0, тобто така неврівноваженість повністю визначається головним моментом дисбалансів МD або його відцентровими моментами інерції. Головний момент дисбалансу підраховується по формулі
 |
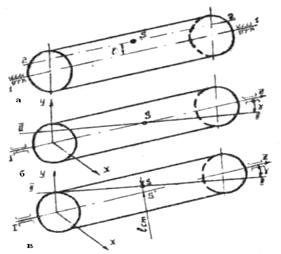
Рис.3.2
При динамічній неврівноваженості (Рис.3.2,в), що складається із статичної і моментної, вісь ротора 1-1 і його головна центральна вісь інерції П-П перетинаються не в центрі мас ротора або перехрещуються. В цьому випадку
 |
тобто динамічна неврівноваженість визначається головним вектором О і головним моментом Ма дисбалансів ротора.
Для усунення додаткового тиску в опорах і коливань станини фундаменту, що викликаються ними, необхідно зрівноважити головний вектор сил інерції Fu і головний момент сил інерції Мu, тобто, щоб вони дорівнювали нулю у будь-який момент руху:
 |
Цей процес називається урівноваженням мас, що обертаються, при їх відомому розташуванні або балансуванням ротора при невідомому розташуванні цих мас.








